4.2. Степени подвижности манипуляторов
Соединяя отдельные звенья рассмотренными способами, можно получить манипулятор требуемой конструкции. Структурная схема одного из таких манипуляторов показана на рис. 4.8. Каждое звено имеет свое наименование. Так, с неподвижным основанием связана колонна, с колонной связана каретка, с кареткой - рука, с рукой - кисть, с кистью - захват. Эти звенья образуют друг с другом кинематические пары 5-го класса, имеющие по одной степени подвижности, Однако в целом количество степеней подвижности у манипулятора гораздо больше.
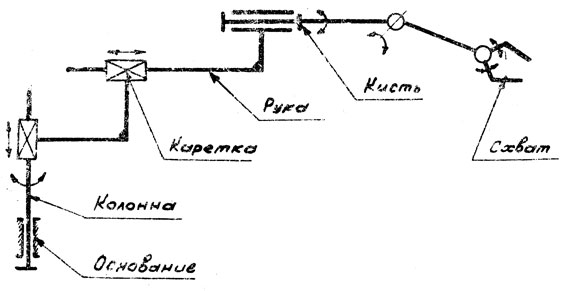
Рис. 4.8
Под степенями подвижности манипулятора (степенями свободы) понимают обобщенные координаты, определяющие в пространстве положения его звеньев. Число степеней подвижности манипулятора n определяется по формуле
где k - число подвижных звеньев; Рi - число кинематических пар i-го класса.
Например, в рассматриваемом случае манипулятор, изображенный на рис. 4.8, содержит 5 подвижных звеньев (исключая неподвижное основание и внутреннее подвижное звено в захвате), образующих 5 кинематических пар 5-го класса. Поэтому
Различают следующие виды степеней подвижности: координатные (глобальные) - обеспечивающие выведение манипулятора в зону манипулирования; переносные (рабочие) - определяющие выведение захвата в заданные места рабочей зоны; ориентирующие (локальные) - обеспечивающие требуемые ориентации захвата в заданном месте рабочей зоны.
Если рабочая зова является объемной, то манипулятор должен иметь не менее трех переносных степеней подвижности. В случае плоской зоны манипулирования достаточно иметь лишь две переносные степени свободы. В общем случае промышленный робот должен иметь не менее одной переносной степени подвижности. Увеличение числа степеней подвижности усложняет манипулятор, но одновременно увеличивает его маневренность, т. е. способность обходить препятствия в рабочей зоне.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'