4.3. Базовые системы координат манипуляторов
Характер переносных степеней подвижности (поступательных П и вращательных В) определяет базовую систему координат манипулятора. Если поступательных переносных степеней подвижности три (П = 3), а вращательных вообще нет (В = 0), то базовая система координат является прямоугольной, а рабочая зона имеет форму параллелепипеда (рис. 4.9).
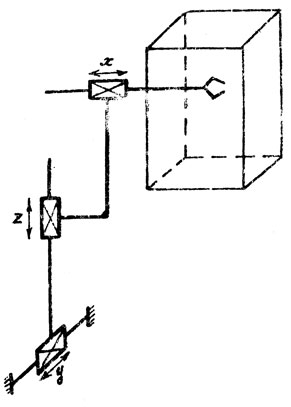
Рис. 4.9
Несмотря на простоту конструкции, ПР с такой системой координат встречаются довольно редко, т. к. имеют большие габариты при малом объеме рабочей зоны и характеризуются сравнительно невысоким быстродействием. Такие роботы обычно либо подвешиваются над обслуживаемым технологическим оборудованием, либо монтируются на направляющих каретках под ним. В качестве примера подобных ПР можно привести отечественный робот "Ритм 05.01" и японский робот "Электрохенд".
В том случае, когда П = 2, В = 1, рабочая зона ПР приобретает цилиндрическую форму, вернее форму неполного цилиндра (рис. 4.10). Соответствующая этому случаю базовая система координат R, Н, φ удобна и получила большое распространение. Она обеспечивает обслуживание большого объема рабочей зоны, но имеет недостаток, связанный с трудностью организации манипулирования предметами на малой высоте. Такую систему координат имеют американский ПР "Вереатран", советский робот "Циклон-3", японский робот "Аутохенд" и др.
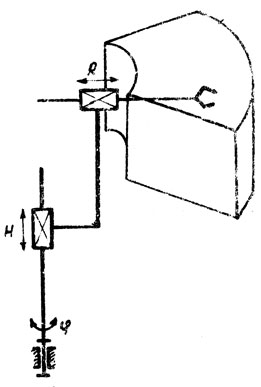
Рис. 4.10
Если П = 1, В = 2, то рабочая зона представляет собой неполный шар, а базовая система координат R, θ, φ является сферической. Структурная схема манипулятора, работающего в такой системе координат, приведена на рис. 4.11, а, а проекции его рабочей зоны показаны на рис. 4.11, б. Это наиболее универсальная базовая система координат. Она обеспечивает обслуживание большего объема рабочей зоны, чем при прямоугольной и цилиндрической системах координат. Однако конструкция манипулятора в этом случае получается более сложной, а ПР нуждается в более сложной системе управления. В такой базовой системе работают американский робот "Юнимейт", советский "Универсал-15" и др.
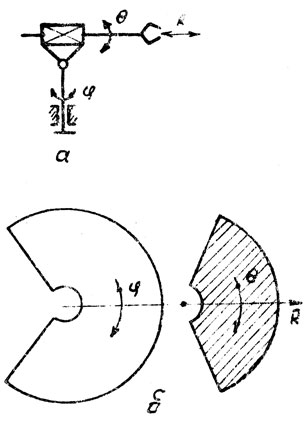
Рис. 4.11
При П = 0, В = 3 получают ангулярную (угловую) базовую систему координат γ, θ, φ. Структурная схема манипулятора, работающего в такой системе координат, приведена на рис 4.12, а. На рис. 4.12, б показаны проекции его рабочей зоны, которая имеет довольно сложную форму, поскольку ограничена частями сфер. Такая система координат наиболее универсальна, обеспечивает обслуживание наибольшего объема рабочей зоны и позволяет строить ПР, обладающие максимальной антропоморфностью. Однако конструкция манипулятора в этом случае очень сложна, громоздка и предполагает сложную систему управления. Другим недостатком такой конструкции является то, что жесткость манипулятора в ней понижена, из-за чего возникают трудности обеспечения необходимой точности позиционирования. Известно несколько типов ПР с такой системой координат. В частности, можно указать на советский робот "Тур-10", американский "Сандстренд" и др.
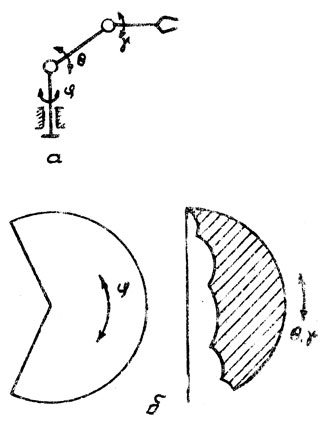
Рис. 4.12
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'