5. Приводы промышленных роботов
5.1. Состав, классификация и краткая характеристика приводов
Под приводом промышленных роботов понимается совокупность технических средств, предназначенных для приведения в движение всех звеньев мянипуляционной системы и схвата рабочего органа в соответствии с требованиями производственного процесса. В функциональном отношении привод помещается между устройством управления ПР и звеньями его манипуляционной системы так, как это показано на рис. 5.1.
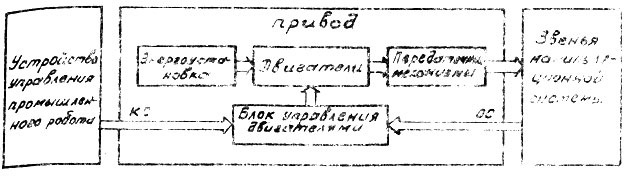
Рис. 5.1
В общем случае привод состоит из энергоустановки (преобразователя энергии), двигателей, передаточных механизмов и блока управления двигателями. Из устройства управления ПР на привод подаются командные сигналы (КС), а от звеньев манипулятора поступают сигналы обратной связи (ОС).
Основными параметрами привода являются: мощность, быстродействие и точность отработки командных сигналов. Для выбора того или иного привода при конструировании ПР наиболее существенным является вид энергоносителя. Поэтому одна из распространенных классификаций приводов основана на этом признаке (рис. 5.2). Характеризуя выделенные на рис. 5.2 типы приводов, отметим следующее.
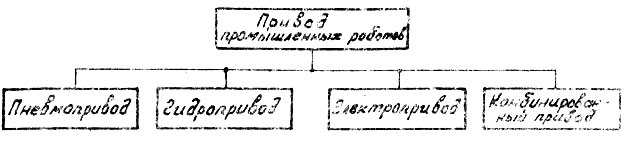
Рис. 5.2
Пневматический привод прост, дешев, надежен. Отличается высоким быстродействием, но имеет серьезный недостаток, связанный с плохой управляемостью из-за используемого типа энергоносителя. Воздух сжимаем. Это затрудняет точное позиционирование по многим точкам рабочей зоны. Обычно позиционирование по каждой степени свободы производят в крайних точках и осуществляют его путем использования специальных тормозных устройств. Грузоподъемность ПР с пневмоприводом невелика - до 20 кг. Однако благодаря своим достоинствам этот тип привода получил широкое распространение. Как показывает статистика, 40-50% мирового парка роботов используют пневмопривод.
Гидравлический привод сложен, и дорог, но весьма эффективен для тяжелых и сверхтяжелых роботов. Он хорошо управляем, т. к. используемая в качестве энергоносителя жидкость несжимаемая. Поэтому легко обеспечивается позиционирование по многим точкам рабочей зоны, а также контурное управление. Последнее обстоятельство обеспечивает применение гидропривода и в роботах со средней грузоподъемностью. Такой привод используется примерно в 30% ПР мирового парка.
Электропривод имеет хорошую управляемость, простой подвод энергии, удобен в эксплуатации, но распространен меньше - всего лишь у 20% ПР мирового парка. Причина сравнительно малого распространения электропривода заключается в том, что его массогабаритные характеристики хуже, чем у пневмо- и гидроприводов. Здесь необходима дополнительная кинематическая цепь между электродвигателем и звеньями манипулятора. Скорость выходного звена существенно зависит от нагрузки, что приводит к необходимости использования дополнительных контуров регулирования привода. Дальнейший прогресс и расширение внедрения электропривода связаны с разработкой новых типов электродвигателей, ориентированных на робототехнику. Электропривод применяется в ПР средней грузоподъемности (десятки килограмм). Следует отметить, что удельная стоимость (руб/Вт) с уменьшением мощности резко возрастает для всех типов приводов и особенно для пневмо- и электропривода.
Комбинированный привод применяется в ПР менее часто, т. к. усложняет конструкцию и обслуживание робота, а также снижает надежность его работы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'