5.2. Пневматический привод
Важной особенностью пневмопривода является то, что этот привод, как правило, легко совмещается со звеньями манипулятора, обеспечивая тем самым непосредственное воздействие на них. Действительно, для поступательной кинематической пары 5-го класса можно использовать конструкцию привода, приведенную на рис. 5.3, а. В этой конструкции два элемента привода гильза 1 и шток 2, жестко связанный с поршнем 3, одновременно являются перемещающимися друг относительно друга звеньями манипуляционной системы ПР. Перемещение достигается путем изменения давлений Р1, Р2 в левой и правой полостях пневмоцилиндра. Для лучшей изоляции этих полостей друг от друга между поршнем 3 и гильзой 1 помещается фторопластовая прокладка 4 и резиновое уплотнение 5.
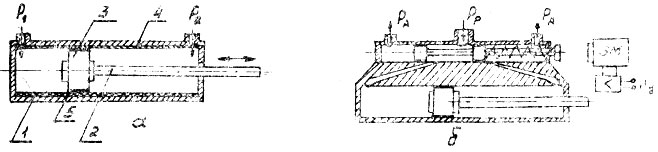
Рис. 5.3
Управление перемещением звеньев осуществляется при помощи золотника, который конструктивно связан с гильзой пневмоцилиндра (рис. 5.3, б). Если электромагнит (ЭМ) обесточен, то воздух под рабочим давлением Рр поступает в левую полость пневмоцилиндра. Его правая полость при этом соединена с атмосферой и находится под давлением Ра < Рр. Образующая разность давлений Рр - Ра перемещает поршень со штоком вправо до упора. Если же на электромагнит поступает единичный сигнал, то шток золотника притягивается к якорю электромагнита. При этом воздух под давлением Рр начинает поступать в правую полость пневмоцилиндра, а его левая полость соединяется с атмосферой. Под действием разности давлений Рр - Ра поршень со штоком перемещается влево до упора.
На принципиальных пневматических схемах рассмотренный пневмопривод изображается так, как это показано на рис. 5.4, где подключение распределителя 1 соответствует перемещению поршня вправо. Из рисунка видно, что левая часть пневмоцилиндра соединена с входным клапаном, а его правая часть через дроссель 2 подсоединена к выходному клапану. В случае срабатывания электромагнита 3 распределитель 1 смещается вправо и осуществляет переключение клапанов. Теперь входной клапан соединяется с правой частью пневмоцилиндра, а выходной - с его левой частью.
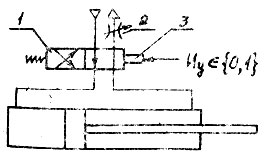
Рис. 5.4
Наряду с пневмодвигателями поступательного движения известны и поворотные пневмодвигатели. Устроены они так, как это показано на рис. 5.5. Полый цилиндрический корпус 1 Разделен на две камеры. Подвижная лопасть 3 жестко связана с поворотным валом 4. Если воздух под давлением Рр поступает в камеры так, как изображено на рис. 5.5, то лопасть вместе с валом поворачивается вправо. При изменении направления действия давлений Рр и Ра, вал будет поворачиваться влево. Это так называемый неполноповоротный пневмомотор, имеющий ограниченный угол поворота.
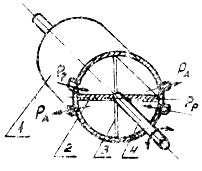
Рис. 5.5
Энергоустановка для пневмопривода может быть представлена в виде принципиальной схемы, приведенной на рис. 5.6. Она состоит из компрессора, запорного муфтового клапана 1, влагоотделителя 2, регулятора давления 3, манометра 4 и маслораспылителя 5. Если в цехе имеется пневмосеть, то робот с пневмоприводом подсоединяется непосредственно к ней. Если же такой сети нет, то пневморобот должен иметь энергоустановку индивидуального пользования.
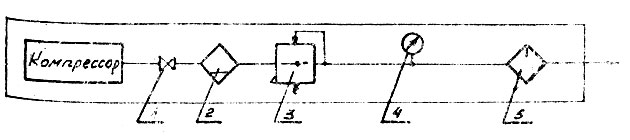
Рис. 5.6
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'