5.3. Гидравлический привод
Энергоносителем в этом типе привода является практически несжимаемая жидкость. В остальном гидропривод похож па пневмопривод. Однако благодаря тому, что жидкость несжимаема, поршень можно довольно точно останавливать в требуемых положениях, одновременно отключая подачу и выпуск жидкости в обе полости рабочего цилиндра. Такое отключение условно изображается средней частью распределителя 1, показанного на рис. 5.7.
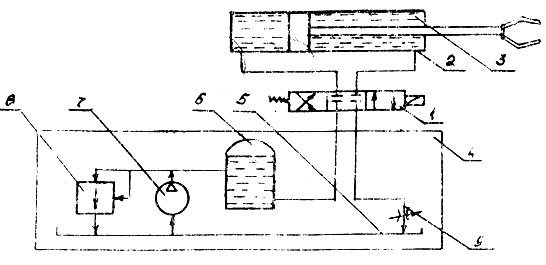
Рис. 5.7
На этом рисунке гидроцилиндр 2 наполнен рабочей жидкостью 3. Источником рабочей жидкости является гидростанция 4, содержащая бак 5 и гидравлический аккумулятор в, используемый для предотвращения влияния отказов системы питания на гидромотор. В аккумулятор рабочая жидкость поступает из бака 5 при помощи насоса 7. Если давление в аккумуляторе превышает заданное, срабатывает выпускной клапан 8. Лишняя жидкость через этот клапан стекает в бак 5. В тот же бак стекает через дроссель 9 жидкость из уменьшающегося объема гидроцилиндра при перемещении в нем поршня со штоком.
Для торможения поршня применяется гидравлическая фиксация, а для позиционирования - упоры и гидравлические демпфирующие устройства. В целом гидропривод, как и пневмопривод, непосредственно связан со звеньями манипулятора и имеет малую инерционность.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'