5.4. Электрический привод
Электропривод современного робота представляет собой комплекс приводов, каждый из которых управляет определенной степенью подвижности. Схематическое изображение электропривода имеет вид, приведенный на рис. 5.8, где приняты следующие обозначения: ЦРПi (i = 1, 2, ..., n) - цифровой регулятор положения; СПi (i = 1, 2, ..., n) - сервопривод; ДУ - датчик угла. В свою очередь, сервопривод СПi строится по схеме, показанной на рис. 5.9. Здесь PC - регулятор скорости; РТ - регулятор тока; ПР - преобразователь; М - двигатель; ДС - датчик скорости; ДУ - датчик угла.
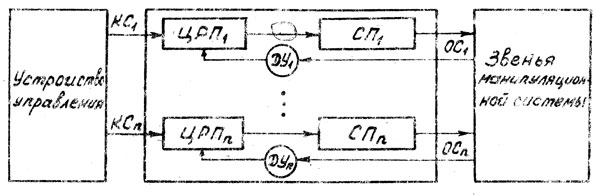
Рис. 5.8

Рис. 5.9
Энергоносителем является электрический ток. Этот привод применяется в роботах с широким диапазоном грузоподъемностей - от долей до сотен килограмм. Он выполняется в виде следящего привода с позиционной или контурной системой управления.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'