5.5. Комбинированный привод
В качестве примера использования комбинированного привода рассмотрим представленную на рис. 5.10 гидропневматическую систему, состоящую из исполнительного гидроцилиндра 1, силового гидроцилиндра 2, емкости 3, клапана 4 и пневмоцилиндра 5. Пневмоцилиндр вместе с гидроцилиндром 2 образуют упрощенную гидростанцию. При движении их общего штока вправо схват робота движется влево. Если при движении поршня пневмоцилиндра влево переключить распределитель исполнительного гидроцилиндра 1 в крайнее правое положение, то схват начнет перемещаться вправо. Емкость 3 используется при этом для компенсации разности объемов протекающей через клапан 4 жидкости при среднем положении распределителя, а также для компенсации ее утечки.
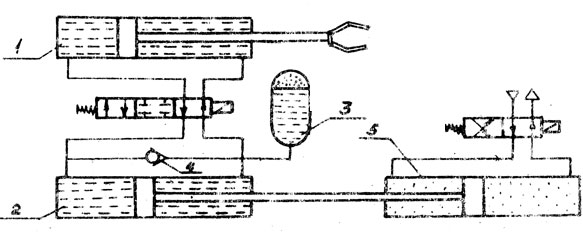
Рис. 5.10
|
ПОИСК:
|
© ROBOTICSLIB.RU, 2001-2019
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'