6. Модули промышленных роботов
6.1. Рабочие органы, их классификация и конструкция
Рабочий орган промышленного робота представляет собой составную часть манипулятора, предназначенную для взаимодействия с объектами манипулирования или непосредственного выполнения технологических операций.
Одна из возможных классификаций рабочих органов имеет вид, показанный на рис. 6.1. Из этой классификации следует, что рабочие органы делятся на захватывающие устройства и технологические инструменты. Причем технологические инструменты, как правило, не берутся захватами, а крепятся к манипулятору вместо, них и представляют собой часть технологической оснастки. Поэтому сразу перейдем к рассмотрению захватывающих устройств (ЗУ).
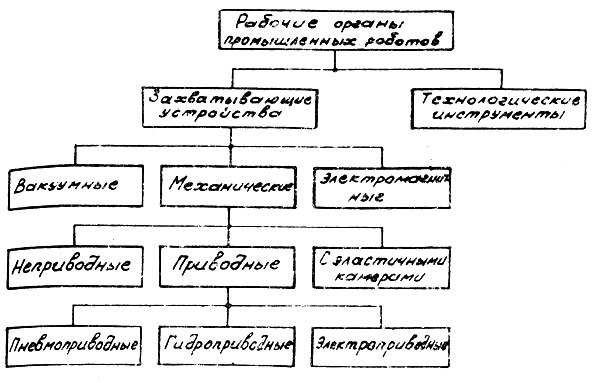
Рис. 6.1
Вакуумные ЗУ применяются для переноса деталей с ровными поверхностями и выполняются в виде вакуумных камер-присосов, одна из которых схематически изображена на рис. 6.2. Камера 1 крепится к кисти руки манипулятора при помощи шарнира 2. Захватывание и удержание детали 3 осуществляется силой атмосферного давления Ра > Рр. Деталь 3 может быть выполнена из любого материала. При манипулировании она не царапается.
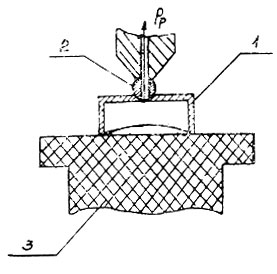
Рис. 6.2
Помимо насосных известны и безнасосные системы, в которых давление создается путем изменения внутреннего объема камер. Обычно вакуумные захватывающие устройства, и прежде всего безнасосные, имеют пониженную грузоподъемность и по этой причине содержат несколько присосов на общей раме.
Электромагнитные ЗУ используются для переноса деталей из ферромагнитных материалов. Захватывание и удержание объектов манипулирования обеспечивается электромагнитами. Такие ЗУ обладают большой силой притяжения на единицу площади и высоким быстродействием. Кроме того, они позволяют переносить фасонные объекты - с ребрами, резьбой и т. п. Их недостаток в ограниченности материалов деталей, а также в нагревании деталей от катушек электромагнита и в остаточной намагниченности объектов манипулирования.
Механические неприводные ЗУ наиболее просты. Они выполняются в виде клещей, цанг, крюков и не предполагают для захвата, удержания и освобождения деталей каких-либо специальных управляющих сигналов. В качестве примера на рис. 6.3 приведено клещевое ЗУ. В таком ЗУ деталь 1 удерживается подвижными губками 2, которые крепятся к кисти на осях 3 и притягиваются друг к другу пружиной 4. Пример работы неприводного ЗУ дан на рис. 6.4. Так, на рис. 6.4, а показан процесс захватывания детали 1, свободно лежащей на опорах 2, путем опускания захвата с губками 3. При опускании губки вначале раздвигаются, а потом под действием пружины сводятся и захватывают деталь. После этого, деталь переносится в требуемое место рабочей зоны, например, вставляется и зажимается в шпиндель металлорежущего станка 1 (рис. 6.4, б). После зажатия схват устремляется вверх, губки раздвигаются и освобождают деталь. Ясно, что усилие, необходимое для освобождения детали, должно быть больше, чем то, которое требуется для ее удержания в захвате, при переносе. Освобождение детали возможно не только путем движения захвата вверх, но и путем его движения влево (рис. 6.4, б). При этом захват как бы соскальзывает с детали. Подобные ЗУ применяются при больших количествах деталей малых масс и габаритов, в частности, при складировании труб. Их недостаток состоит в возможности повреждения поверхности предметов манипулирования, а также в возможности повреждения самого захвата при захватывании и освобождении деталей.
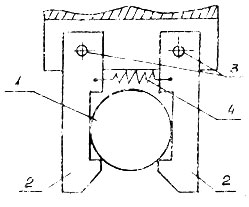
Рис. 6.3
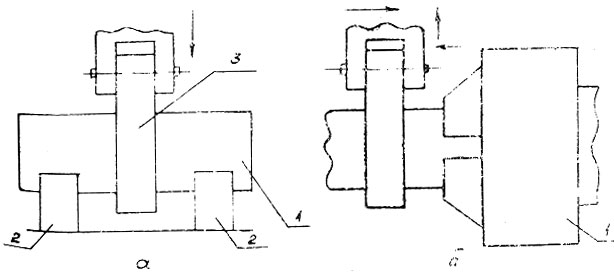
Рис. 6.4
Механические приводные ЗУ помимо собственно захватывающих и зажимающих элементов включают также приводные устройства. Наиболее распространены клещевые приводные ЗУ с пневмо- или гидроприводом в захвате. Конструкция одного из таких ЗУ приведена на рис. 6.5. В исходном состоянии губки под действием пружины 1 разжаты. При зажимании поршень идет влево и сводит губки, а при разжимании он перемещается вправо. Устройство клещевого ЗУ с червячной парой и электроприводом показано на рис. 6.6, где электромотор 1 через редуктор 2 связан с червячной передачей 3. При вращении вала двигателя влево или вправо губки 4 вращаются вокруг осей 5 вверх или вниз.
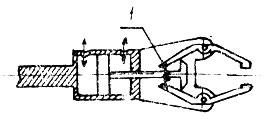
Рис. 6.5
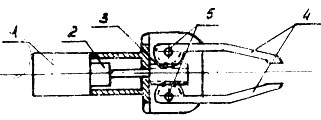
Рис. 6.6
Механические ЗУ с эластичными камерами применяют для переноса хрупких изделий небольшой массы, неправильной формы (бутылки, электрические лампочки, колбы и т. п.). Захватывание и удержание объектов осуществляется за счет деформации эластичных камер под давлением воздуха или жидкости. Например, пятипалое ЗУ с изгибающимися эластичными камерами имеет вид, показанный на рис. 6.7, а, а устройство отдельного пальца такого ЗУ показано на рис. 6.7, б. Как следует из рис. 6.7, б, эластичная камера каждого пальца по сечению (см. разрез по стрелке А-А) имеет разную жесткость. За счет этого при подаче в нее сжатого воздуха под давлением Рр она деформируется так, что ось 1 изгибается и принимает положение 2. Благодаря этому многопалое ЗУ 1 захватывает и удерживает предмет 2 пальцами 3 так, как это показано на рис. 6.8.
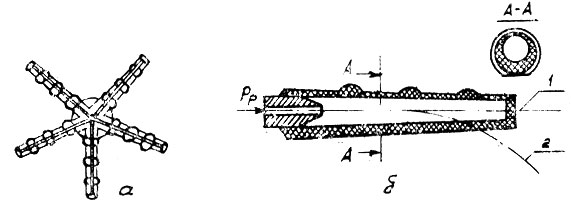
Рис. 6.7
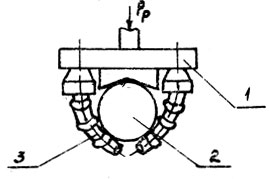
Рис. 6.8
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'