6.2. Устройства передвижения
Устройства передвижения ПР относятся к исполнительным устройствам, обеспечивающим перемещение манипулятора или робота в целом в необходимое место 3-мерной рабочей зоны в пространстве глобальных степеней подвижности. Такие устройства состоят из ходовой части и приводных систем. Ходовая часть может быть колесной, гусеничной, подвесной, напольной и т. п. Однако в большинстве случаев координатные (глобальные) перемещения ПР осуществляются при помощи специальных кареток или тележек. В качестве натравляющих в них применяют элементы типа "ласточкин хвост", трубчатые направляющие, нательные и подвесные рельсы. Для обеспечения движения применяют все виды приводных устройств.
В качестве примера использования устройства передвижения тельферного типа можно привести отечественный робот ТРТ-1-250, предназначенный для транспортирования уложенных в тару деталей. Этот робот снабжен двумя манипуляторами грузоподъемностью по 250 кг. Погрешность позиционирования такого робота ±10 мм.
Для внутрицеховых перевозок используют транспортные роботы, перемещающиеся вдоль заранее определенных трасс. Трассы задаются расположенными на полу светоотражающими или магнитными лентами либо спрятанными под полом индукционными кабелями, например так, как это показано на рис. 6.9. Транспортный робот 1 имеет чувствительный датчик 2, контролирующий его положение относительно трассы 3. В частности, подобной системой снабжен промышленный робот МП-12Т, имеющий колесный ход для перевозок контейнеров с различными грузами.
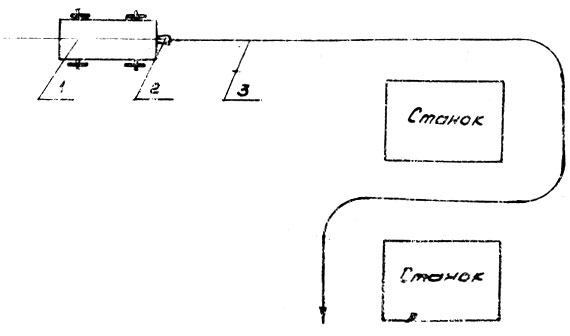
Рис. 6.9
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'