6.3. Унифицированные модули промышленных роботов
Отдельные части роботов, в том числе элементы рассмотренных ранее манипуляционных систем, а также приводы, рабочие органы, устройства передвижения и т. п. выполняются в виде унифицированных модулей.
Под модулем понимается универсальный агрегатный узел, обладающий функциональной полнотой и конструктивной завершенностью.
Под узлом, в свою очередь, понимается конструктивно законченная сборочная единица, имеющая узкое функциональное назначение.
В качестве примера на рис. 6.10 приведен набор основных модулей исполнительной части промышленного робота. Это не только совокупность звеньев манипулятора, но и конструктивно совмещенные с ними элементы приводов. На позиции 1 этого рисунка показан модуль механизма поворота (колонна), 2 - механизм подъема (каретка), 3 - механизм качения, 4 - рука выдвижная, 5 - рука локтевая двухшарнирная, 6 - рука локтевая трехшарнирная, 7 - захватывающее устройство.
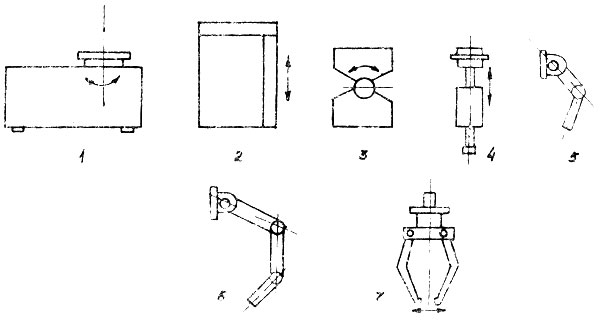
Рис. 6.10
Все эти модули конструктивно совместимы и могут подсоединяться друг к другу, образуя различные схемы манипуляторов. Действительно, используя модули 1, 2, 4, 7, получим манипулятор ПР типа "Версатран" (рис. 6.11). Объединяя модули 1, 3, 4, 7, получим манипулятор промышленного робота типа "Юнимейт" (рис. 6.12). Подобным образом синтезируются и другие типы манипуляторов.
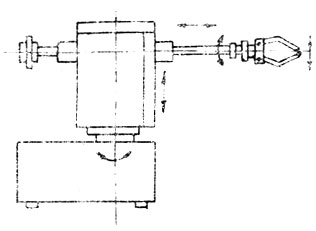
Рис. 6.11
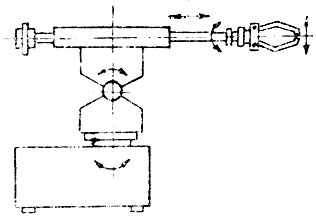
Рис. 6.12
Следует также отметить, что наряду с модулями исполнительных систем широкое распространение получили управляющие, программные, информационные и другие модули.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'