7. Манипулятор промышленного робота как объект управления
7.1. Общая кинематическая схема манипулятора с пневмоприводом
Рассмотрим конструкцию одного из распространенных отечественных пневматических промышленных роботов МП-9С. Этот робот применяется на сборочных операциях, а также при обслуживании прессов холодной штамповки. Он имеет три степени подвижности - две поступательные и ОДНУ вращательную. Как отмечено в разд. 4, рабочая зона подобного робота (П = 2, В = 1) имеет форму неполного цилиндра. Причем для МП-9С параметры рабочей зоны составляют: R = 150 мм, H = 30 мм, φ = 120°. Грузоподъемность этого робота 0,2 кг. а масса самого ПР без системы управления равна 25 кг.
Общая кинематическая схема робота МП-9С с пневмоприводом изображена па рис. 7.1. По направляющей 1 основания 2 вертикально перемещается каретка 3. Консоль 4 каретки жестко соединена со штоком вертикального пневмоцилиндра 5. Благодаря этому при работе пневмоцилиндра 5 каретка 3 может перемещаться вдоль направляющей 1 вверх и вниз. Диапазон перемещений регулируется подвижными упорами 6, на которых расположены датчики, взаимодействующие с расположенными на консоли электромагнитами 7.
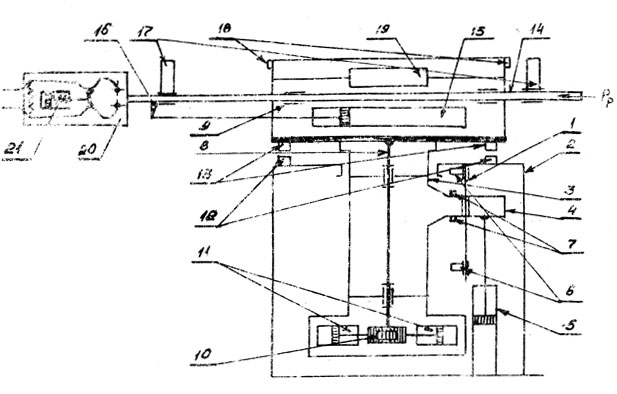
Рис. 7.1
В подшипниках каретки 3 смонтирована вертикальная колонна 8, к верхнему фланцу которой крепится рука 9. В нижней части колонна имеет зубчатое колесо (шестерню), образующее вместе с зубчатой рейкой реечную пару 10. Зубчатая рейка, в свою очередь, жестко соединена со штоками пневмоцилиндров 11 механизма поворота. При движении поршней этих цилиндров вправо или влево перемещающаяся вместе с ними рейка приводит во вращение шестерню колонны. Колонна при этом также приходит во вращение. Ограничение этого вращения регулируется подвижными упорами 12 с датчиками, взаимодействующими с электромагнитами 13, расположенными на верхнем фланце колонны.
Узел руки 9 жестко прикреплен к фланцу колонны 8. Перемещение штанги 14 руки по горизонтали осуществляется пневмоцилиндром 15, шток которого жестко связан с кронштейном 16 штанги. Ограничение и регулировка горизонтального хода руки осуществляется при помощи двух подвижных упоров 17 с постоянными магнитами, взаимодействующими с датчиками 18. В корпусе руки имеется гидравлический амортизатор 19, штоки которого воспринимают и гасят ударные воздействия.
Рабочий орган 20 в виде механического приводного захватывающего устройства жестко крепится к штанге руки. Смыкание губок осуществляется подачей воздуха под давлением Рр в левую полость пневмоцилиндра 21 через трубу внутри штока. При этом поршень идет вправо, штифт освобождает губки и под действием пружины они смыкаются. При стравливании воздуха из цилиндра 21 его поршень под действием внутренней пружины перемещается влево, штифт входит в зазор между губками и разводит их.
Помимо амортизатора 19 руки, в конструкции манипулятора предусмотрены также амортизаторы, смягчающие удары в конце подъема или опускания каретки и поворотов колонны (на рис. 7.1 не показаны). Эти устройства, как и амортизаторы руки, являются гидравлическими. Сила сопротивления создается в них за счет перетекания жидкости из одной полости в другую через регулируемое по сечению отверстие.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'