7.2. Пневмопривод промышленного робота с элементами управления
В промышленных роботах с пневмоприводом каждое из подвижных звеньев может находиться в одном из двух крайних положений. Поршни пневмоцилиндров при этом также находятся в соответствующих крайних положениях. Управление пневмоцилиндрами осуществляется при помощи электропневматических распределительных клапанов. Упрощенна я схема управления пневмоцилиндрами рассмотренного робота МП-9С имеет вид, представленный на рис. 7.2.
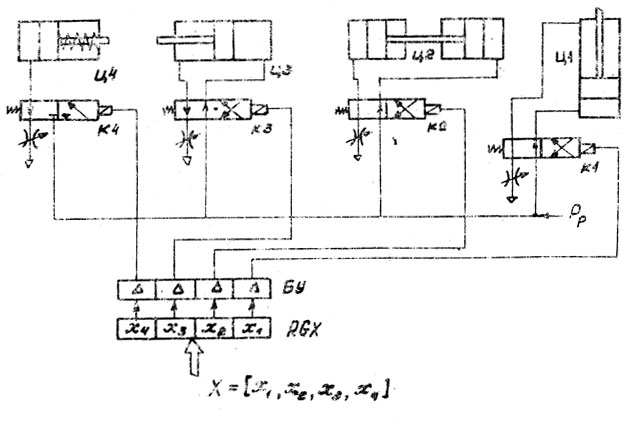
Рис. 7.2
На этом рисунке показаны четыре пневмоцилиндра: Ц1 - вертикального хода колонны, Ц2 - поворота каретки, Ц3 - горизонтального перемещения руки и Ц4 - сведения и разведения губок схвата. Работой пневмоцилиндров управляют соответствующие пневмоклапаны: К1, К2, К3, К4. На их управляющие входы поступают усиленные по мощности в блоке усилителей БУ информационные сигналы xi ∈ {0, 1} (i = 1, 2, 3, 4) с выходов регистра RGX.
Будем считать, что показанное на рис. 7.2 состояние пневмоцилиндров обеспечивается нулевыми значениями сигналов (xi = 0). Если состояние какого-либо пневмонилиндра необходимо изменить на обратное, на соответствующий клапан нужно подать единичный сигнал. Иными словами, управление манипулятором может осуществляться векторами X = [х1, х2, х3, х4], подаваемыми в нужной последовательности и с требуемой частотой на входы регистра RGX.
Например, при сведении захвата в изображенном на рисунке состоянии манипулятора необходимо в RGX записать вектор X = 1000. При этом клапан К4 сдвинется влево, воздух под давлением Рр из магистрали поступит в пневмоцилиндр Ц4 и губки захвата сойдутся, зажимая деталь, цилиндр Ц4, и губки захвата сойдутся, зажимая деталь.
Если, не разжимая захват, манипулятор должен измениться вектор Х = 1111. При этом клапаны К1, К2, К3 переключаются, воздух под давлением Рр поступает в те части цилиндров Ц1, Ц2, Ц3, которые перед этим были связаны с атмосферой, а воздух из их уменьшающихся объемов через соответствующие дроссели стравливается. Дроссели необходимы для регулирования скорости перемещения поршней цилиндров и, следовательно, скорости перемещения соответствующих звеньев манипулятора.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'