7.3. Промышленный робот с электроприводом
В качестве примера рассмотрим шведский робот ИРб-6 фирмы АСЕА, который применяется как для обслуживания технологического оборудования, так и для выполнения окрасочных работ, шлифования и т. п. Этот робот имеет три основные (переносные) и две ориентирующие степени подвижности. Его грузоподъемность составляет 6 кг, а масса манипулятора равна 125 кг.
Общая кинематическая схема такого робота имеет вид, представленный на рис. 7.3. Его манипулятор содержит механизм поворота относительно вертикальной оси, механизм радиального выдвижения, механизм подъема и механизмы ориентирующих перемещений рабочего органа.
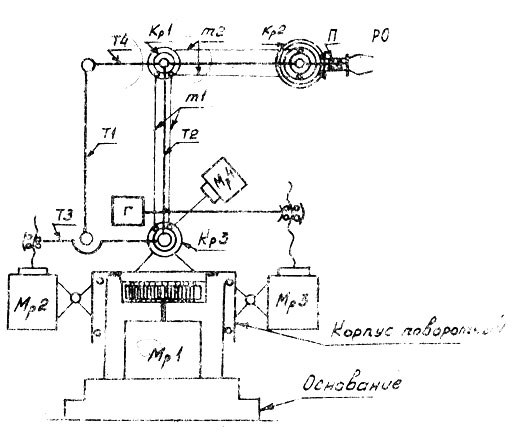
Рис. 7.3
Механизм поворота относительно вертикальной оси выполнен в виде мотора-редуктора Мр1, жестко связанного с основанием. Редуктор мотора Mp1 посредством волновой передачи соединен с поворотным корпусом, на котором шарнирно закреплены моторы-редукторы Мр2, Мр3. Имеется параллелограмм механизма радиального выдвижения рабочего органа Р0. Параллелограмм состоит из двух вертикальных тяг Т1, Т2 и двух горизонтальных тяг Т3, Т4. С тягой Т3 через шариковую передачу связан мотор-редуктор Мр2, осуществляющий подъем и опускание рабочего органа.
Радиальное выдвижение рабочего органа производится с помощью мотора-редуктора Мр3, связанного через шариковую передачу с тягой Т2. Для уравновешивания приводов применяется уравновешивающий груз Г.
Механизмы ориентирующих степеней подвижности состоят из моторов-редукторов Мр4, установленных соосно с нижним шарниром; тяги Т2; систем тяг m1, m2 и кривошипов Kp1, Кр2, Кр3, образующих два параллельных транслятора из двух параллелограммов. Поворот рабочего органа осуществляется кривошипом Кр2, а вращение формируется от параллельного кривошипа за счет безлюфтовой конической передачи П.
Все степени подвижности оснащены датчиками положения, а именно датчиками угла (ДУ). Сигналы с этих датчиков по цепям обратной связи поступают на соответствующие цифровые регуляторы, где сравниваются с кодами требуемых положений звеньев. Сигналы рассогласования отрабатываются сервоприводами.
Упрощенную схему управления манипулятором рассмотренного ПР с электроприводом можно представить так, как показано на рис. 7.4. На этом рисунке изображены шесть сервоприводов - пять для управления основными и ориентирующими степенями подвижности и один для управления захватом. На входах сервоприводов СПi включены цифровые регуляторы положений ЦРПi, сравнивающие сигналы обратной связи от датчиков углов ДУ, - с кодами требуемых положений х, снимаемых из соответствующих разрядов регистра RGX. Иными словами, управляющие слова представляют собой векторы X = [х1, х2, х3, x4, x5, x6], записываемые в нужной последовательности с нужной частотой в регистр RGX из устройства управления. Причем компоненты этих векторов xi представляют собой двоичные числа, кодирующие значения соответствующих координат.
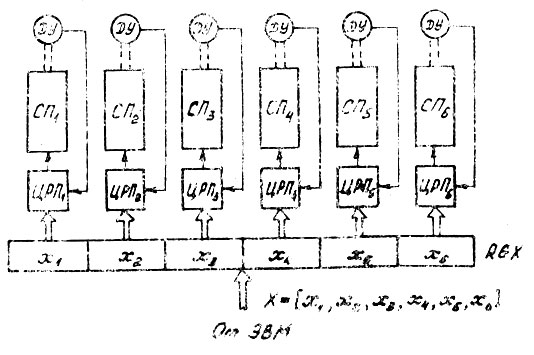
Рис. 7.4
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'