8. Системы управления роботов
8.1. Задачи, решаемые системой управления робота
Пусть изображенный на рис. 8.1 подвижный манипуляционный робот с бортовой системой управления (СУ) должен переместиться из некоторого начального положения в рабочую зону и взять в ней предмет Ц. Для простоты вначале положим, что робот должен двигаться вдоль координаты из некоторого начального положения, характеризуемого значениями координат хн, yн центра тяжести тележки и значениями углов αн, βн манипулятора, в некоторое конечное положение xк, yк, αк, βк.
Если ввести обобщенные координаты qi так, чтобы выполнялись соответствия: х → q1; y → q2; α → q3; β → q4, то начальное положение робота можно охарактеризовать вектором QH = [q1н, q2н, q3н, q4н], конечному положению будет соответствовать вектор QK = [q1к, q2к, q3к, q4к], а для любого j-го промежуточного положения будем иметь
Подобно этому для манипулятора с n степенями подвижности получим
Причем переход из QH в QK можно представить в виде некоторой последовательности переходных положений
которые в непрерывном времени t образуют траекторию перемещения манипулятора Q(t).
Очевидно, что для перевода робота из QH в QK к его звеньям необходимо приложить соответствующую последовательность управляющих воздействий {Uj}. Причем для перевода робота из состояния Qj в состояние Qj+1 нужен управляющий вектор
компоненты которого представляют собой сигналы, подаваемые на приводы соответствующих звеньев манипулятора или устройств перемещения. Иными словами, зная Q(t) необходимо определить соответствующий закон изменения U(t), который и позволит реализовать переход схвата из точки xcн, yсн в точку хск, yск (см. рис. 8.1), поскольку в общем случае справедливо соотношение
где S = [хс, yс, zc] - вектор, определяющий положение центра схвата в трехмерной рабочей зоне (0, х, y, z).
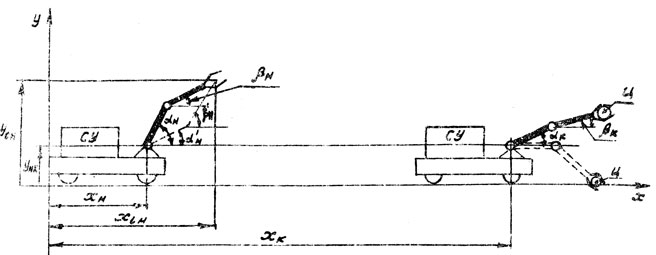
Рис. 8.1
Это так называемая прямая кинематическая задача, позволяющая по значениям обобщенных координат находить координаты схвата в рабочем пространстве робота.
Однако в тех случаях, когда удобно задавать не Q, а желаемые значения вектора S, необходимо решать обратную кинематическую задачу
Неудобным при этом является то, что функции F и F-1 неоднозначны. Например, из рис. 8.1 видно, что вектору SH = [xсн, yсн] соответствуют два (если манипулятор - плоский двухзвенник) вектора, а именно тот, который определяется значениями углов αн, βн и тот, который определяется значениями α'н и β'н. При большем числе степеней подвижности неоднозначность увеличивается, что и позволяет многостепенному манипулятору обходить препятствия.
Итак, когда задается траектория схвата S(t), система управления должна вначале рассчитать траекторию Q(t) из соотношения
и после этого определить закон изменения управляющего вектора U(t). Определение и отработка U(t) должны вестись с учетом динамических свойств робота.
Все это весьма непростые задачи. Их решение существенно усложняется, если в процессе реализации траектории Q(t) в рабочей зоне возникают препятствия. Ясно, что препятствия нужно обходить и оптимизировать при этом траекторию движения манипулятора.
В простейших случаях траекторию Q(t) задает либо предварительно формирует сам оператор. В более сложных случаях, например в случае роботов с элементами искусственного интеллекта, эта траектория формируется автоматически в процессе работы робота.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'