8.2. Классификация систем управления
С учетом изложенного в 8.1, представим классификацию систем управления роботов в виде схемы, изображенной на рис. 8.2.
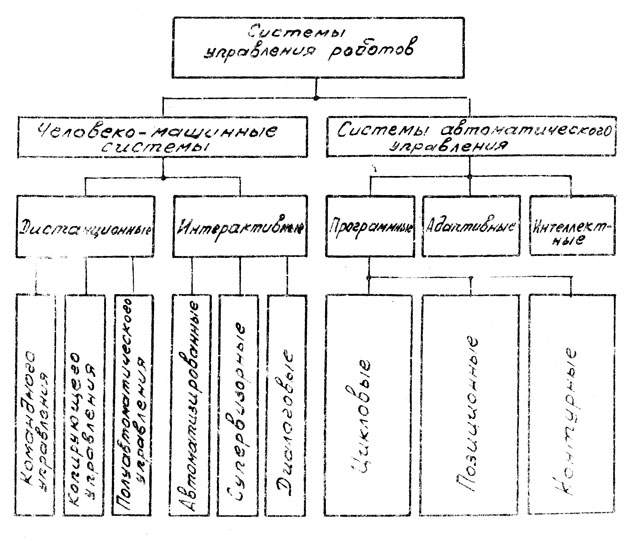
Рис. 8.2
В основу этой классификации положено разделение систем управления на человеко-машинные и автоматические. В основе человеко-машинных систем лежат рассмотренные в разд. 2 биотехнические методы управления, а системы автоматического управления представлены в виде совокупности программных, адаптивных и интеллектных устройств, обеспечивающих автономное функционирование роботов. Иными словами, при построении данной классификации полагалось, что в человеко-машинных системах оператор непосредственно находится в контуре управления роботом либо постоянно, как в дистанционных системах, либо эпизодически, как в интерактивных системах. Автоматические системы управления, в свою очередь, строятся так, что обеспечивают возможность функционирования роботов вообще без участия оператора. Однако учитывая то, что абсолютно автономный режим в обозримом будущем нереален, считается, что интерактивные системы управления, объединяющие достоинства дистанционных и автоматических устройств, являются наиболее перспективными как для исследовательских, так и для промышленных роботов. Учитывая отмеченные обстоятельства, перейдем к более подробному рассмотрению особенностей различных систем управления.
Доставка цветов Ивангород Служба доставки среди цветов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'