8.3. Структура человеко-машинных систем управления
Структура дистанционных систем управления приведена на рис. 8.3. В частности, на рис. 8.3, а показана структура командного, на рис. 8.3, б - структура котирующего, а на рис. 8.3, в - структура полуавтоматического управления.
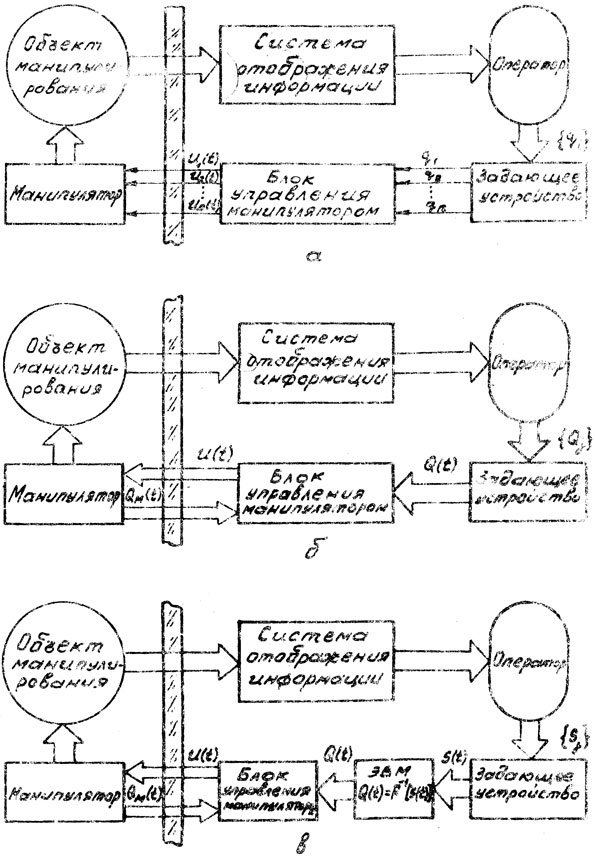
Рис. 8.3
Предполагается, что объект манипулирования и исполнительная часть робота - манипулятор отделены от оператора перегородкой и находятся в опасной и удаленной от него зоне. При помощи системы отображения информации оператор наблюдает за процессом манипулирования и управляет им. В случае командного управления (см. рис. 8.3, а) он подает на блок управления через задающее устройство требуемые значения обобщенных координат qi отдельно по каждой степени подвижности (i = 1, 2, ..., n). На основе этих значений блок управления формирует управляющие сигналы ui(t), поступающие на приводы манипулятора.
В случае копирующего управления (см. рис. 8.3, б) задающее устройство воспринимает последовательности векторов {Qj} и преобразует их в траектории Q(t), которые, в свою очередь, преобразуются блоком управления в управляющие воздействия U(t). Следует отметить, что эти воздействия формируются с учетом сигналов обратной связи QM(t), поступающих от звеньев манипулятора и характеризующих текущие значения обобщенных координат.
При полуавтоматическом управлении оператор задает не траекторию движения манипулятора, как в предыдущем случае, а траекторию движения схвата или последовательность тех значений Sj, которые лежат на желаемой траектории S(t). Управляющая ЭВМ решает обратную кинематическую задачу, определяет соответствующую траекторию Q(t), а блок управления формирует закон изменения управляющих воздействий U(t) с тем, чтобы вести центр схвата через последовательность точек {Sj} или вдоль траектории S(t).
В интерактивных человеко-машинных системах используются более совершенные бортовые устройства управления, вплоть до интеллектных. Обычно такие устройства, как и дистанционные, разделены на две удаленные друг от друга части (рис. 8.4). Одна из них представляет собой бортовую систему управления, а вторая является, по существу, пультом оператора.
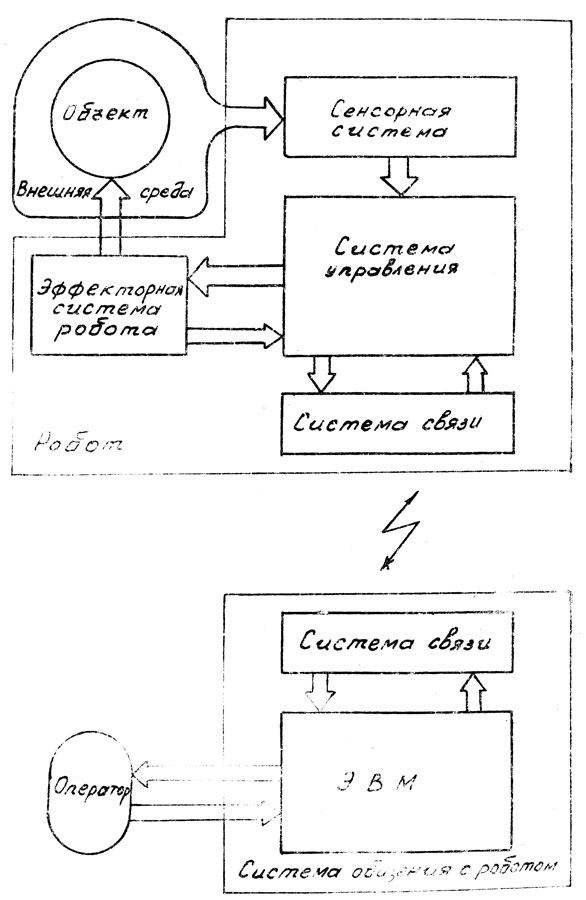
Рис. 8.4
В случае автоматизированных интерактивных систем часть операций по управлению роботом выполняется оператором, а другая, как правило, меньшая часть, реализуется автоматически бортовой системой.
При интерактивном супервизорном управлении оператор, наблюдающий на экране дисплея своей ЭВМ обстановку в месте действия робота, подает лишь отдельные команды - целеуказания. По этим командам включаются те или иные программы автоматического управления роботом.
Диалоговые интерактивные системы управления отличаются тем, что позволяют роботу не только выполнять команды оператора, но и активно взаимодействовать с ним, поскольку его бортовая система является интеллектной.
Таким образом, системы автоматического управления действительно являются как бы составной частью интерактивных систем. Однако они отличаются тем, что при их использовании оператор не принимает непосредственного участия в процессе тактического управления. Его функции сводятся к программированию, обучению, запуску и периодическому контролю за действиями робота.
Так, системы программного управления работают по заранее заданным жестким программам. Эти программы хранятся в памяти робота и могут изменяться только при его настройке. В процессе работы программы не меняются, информация о внешней среде не учитывается, хотя сигналы датчиков внутренней информации и сигналы датчиков обслуживаемого технологического оборудования используются. Роботы, снабженные такими системами управления, относятся к первому поколению.
Адаптивные системы автоматического управления характерны для роботов второго поколения, а интеллектные - для роботов третьего поколения.
Ввиду того, что данное пособие посвящено промышленным роботам, которые снабжены, как правило, системами автоматического управления программного типа, рассмотрим эти системы более подробно в следующем разделе. Здесь лишь отметим, что в соответствии с классификацией, приведенной на рис. 8.2, такие системы подразделяются на цикловые, позиционные и контурные.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'