9. Структура систем программного управления
9.1. Цикловые системы программного управления
Это наиболее простые и наименее универсальные системы автоматического программного управления. Они применяются в таких ПР, у которых позиционирование по каждой степени подвижности qi (i = 1, 2, ..., n) возможно лишь в двух крайних точках qiн, qiк. где индексы ник означают начальное и конечное положения соответствующих подвижных звеньев. Например, для показанного на рис. 4.9 манипулятора с тремя поступательными степенями подвижности (П = 3, В = 0) при двухточечном позиционировании значения координат должны удовлетворять соотношениям х ∈ {хн, хк}, y ∈ {yн, yк}, z ∈ {zн, zк}. Это означает, что из всех точек рабочей зоны доступными для манипулирования являются лишь 8 внешних точек xнyнzн, xкyнzн, ..., xкyкzк, поскольку только в этих точках захват манипулятора может находиться в стационарных состояниях Sj Соответствующие этим состояниям положения звеньев Qj вместе с промежутками времени Δtj, в течение которых они должны оставаться неизменными, составляют основу программы работы ПР с цикловой системой управления. Структура такой системы приведена на рис. 9.1.
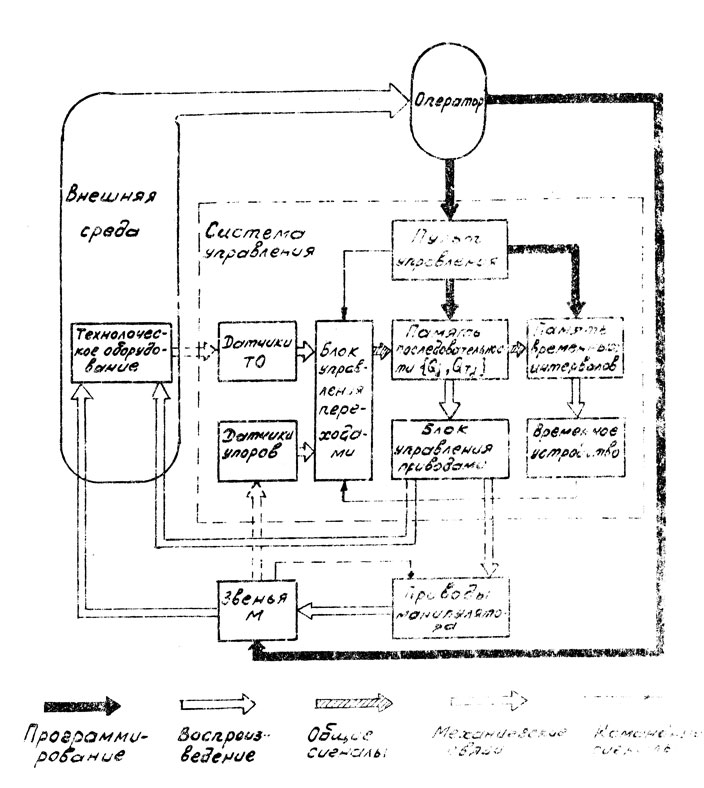
Рис. 9.1
Как следует из рис. 9.1, собственно система управления в данном случае состоит из пульта управления, памяти последовательности состояний {Qj}, памяти временных интервалов {Δtj}, блока управления переходами от состояний Qj к состояниям Qj+1, временного устройства, блока управления приводами, датчиков упоров звеньев манипулятора и датчиков технологического оборудования (ТО). Кроме того, на рис. 9.1 показана внешняя среда с технологическим оборудованием, звенья манипулятора и приводы ПР.
Широкой стрелкой обозначен канал воздействия блока управления приводами на технологическое оборудование путем подачи на него сигналов включения, переключения, выключения и т. д. Здесь же условно изображен человек-оператор, осуществляющий программирование робота. Каналы воздействия оператора на ПР в режиме программирования обозначены затемненными широкими стрелками, пути передачи информации в режиме воспроизведения заданной программы отмечены широкими светлыми стрелками, заштрихованными стрелками отмечена связь, используемая как при программировании, так и при воспроизведении. Тонкими стрелками обозначены пути командных сигналов, а пунктирными стрелками показаны механические связи.
В процессе программирования оператор прежде всего воздействует на упоры звеньев манипулятора и тем самым задает их начальные и конечные положения, т. е. определяет величины их перемещений. Далее, при помощи пульта управления он заносит в память последовательности информацию о последовательности {Qj, Qтj}, т. е. о последовательности отработки звеньев Qо и о соответствующих режимах Qтj работы технологического оборудования. В память временных интервалов оператор заносит информацию о последовательности {Δtj}. Смена ячеек памяти при программировании осуществляется путем воздействия на блок управления переходами непосредственно с пульта управления. Именно по этой причине канал связи между блоком управления, переходами и памятью последовательности используется как в процессе программирования, так и в режиме отработки (заштрихованная стрелка).
В режиме отработки первый сигнал чтения задается с пульта. По этому сигналу совокупность Q1, Qт1 извлекается из памяти и поступает в блок управления приводами. На основании Q1 блок управления приводами формирует управляющие сигналы U1 для приводов манипулятора, а на основании Qт1 - сигналы Uт1 для управления технологическим оборудованием. Одновременно из памяти временных интервалов (Учитывается информация о длительности интервала 916;t1, которая поступает на входы временного устройства. Это устройство представляет собой реле времени, формирующее выходной сигнал с задержкой, равной 916;t1. Сигнал с выхода временного устройства представляет собой сигнал о смене состояний манипулятора. Он поступает на вход блока управления переходами и, если датчики ТО и датчики упоров выдают требуемую информацию, вызывает его срабатывание. Срабатывание этого блока приводит к чтению из памяти следующих значений Q2, Qт2, Δt2 и т. д. до окончания последовательностей {Qj, Qтj}, {Δtj}. Описанный процесс повторяется циклически и прерывается командой "ОСТАНОВ". Останов происходит и при неверном срабатывании датчиков. В этом случае манипулятор останавливается сразу, не дожидаясь окончания цикла, а на пульте управления включается соответствующий индикатор.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'