9.2. Позиционные системы программного управления
При использовании таких систем предполагается, что приводы манипулятора ПР позволяют организовать позиционирование по каждой степени подвижности qi не только в крайних, но и в промежуточных точках. По этой причине обобщенные координаты становятся дискретными q‾i и для захвати становятся доступными как внешние, так и внутренние точки рабочей зоны. Эти точки можно пронумеровать и задавать последовательности требуемых значений Qj в виде последовательностей номеров {Rj} соответствующих позиций.
Структура системы управления позиционного типа приведена на рис. 9.2. В отличие от цикловой, она дополнительно содержит память дискретных позиций q‾i по каждой степени подвижности (i = 1, 2, ..., n) и связанный с нею блок дискретного позиционирования, образующий совместно с приводами, звеньями и датчиками манипулятора следящую систему по отработке точек позиционирования. Эта система содержит также отдельный блок переключения технологического оборудования.
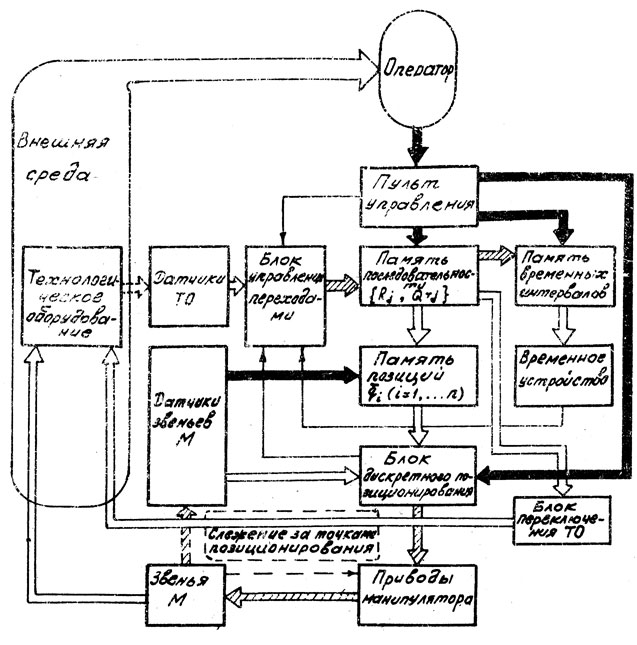
Рис. 9.2
Как и на рис. 9.1, затемненные стрелки показывают путь информации при программировании ПР, светлые - при воспроизведении программы, а заштрихованные - при программировании и при воспроизведении. Датчики звеньев манипулятора связаны с блоком дискретного позиционирования, что необходимо при слежении, и с памятью позиций, что необходимо для формирования информации о желаемых точках позиционирования.
Программирование системы управления в данном случае осуществляется с использованием метода обучения. В режиме обучения человек-оператор с пульта управления воздействует на блок дискретного позиционирования и последовательно выводит каждое звено в требуемые точки позиционирования рабочей зоны. Автоматически появляющаяся при этом на выходах датчиков манипулятора информация о положении звеньев в виде значений q‾i фиксируется в памяти позиций. В целом эта процедура аналогична установке механических упоров в работах циклового типа.
После фиксации всех позиций q‾i в память последовательности заносится определяемая программой работы ПР последовательность номеров точек позиционирования Rj и соответствующие значения Qтj, определяющие режимы работы ТО. В память временных интервалов заносятся соответствующие значения Δtj.
Следует отметить, что данный метод программирования с обучением, основанный на разделении информации о точках позиционирования и о последовательности этих точек, не является единственным. Действительно, если память последовательности и память позиций объединить, то появится возможность при обучении сразу запоминать совокупность тех значений q‾i, которые определяют требуемые точки позиционирования захвата. Такой метод упрощает процесс программирования и сводит его по существу к обучению, поскольку теперь достаточно провести захват только через последовательность точек позиционирования и зафиксировать с пульта нужные состояния (более подробно суть данного процесса рассмотрена в 9.3). Однако объем памяти при этом, как правило, возрастает, поскольку в общем случае приходится запомнить все циклически повторяющиеся участки последовательности точек позиционирования.
В режиме отработки схема управления, показанная на рис. 9.2, работает так, что извлекаемые из памяти последовательности номера Rj точек позиционирования поступают на адресные входы памяти позиций. В результате из этой памяти считываются соответствующие значения дискретных координат q‾ij, которые отрабатываются блоком дискретного позиционирования. Одновременно с этим из памяти последовательности считываются значения Qтj, включающие ТО в предписанные режимы. Считываемые значения временных интервалов Δtj настраивают временное устройство. Переключение блока управления переходами происходит после срабатывания временного устройства при условии, что работа блока позиционирования окончена, т. е. очередное звено отработало заданную позицию и датчики ТО находятся в требуемом состоянии.
Следует отметить, что блок дискретного позиционирования может вести отработку заданных позиций как последовательно звено за звеном, так и параллельно, когда все звенья отрабатывают свои перемещения одновременно. Для организации параллельного режима необходимо последовательности единичных команд, определяющих действия отдельных звеньев, объединять в кадры. Кадр, в свою очередь, включает совокупность таких единичных операций, которые образуют законченное движение, например, реализуют перемещение захвата в точку Sj рабочей зоны путем одновременной отработки всех звеньев манипулятора.
Кадры могут объединяться в подпрограммы, выполняющие какие-то небольшие, но законченные действия промышленного робота.
То обстоятельство, что позиционная система управления, включающая цикловую как частный случай (q‾i ∈ {qiн, qiк}), может работать с различными манипуляционными и приводными системами, определяет целесообразность ее реализации в виде универсального управляющего модуля. Именно по модульному принципу построено устройство ЕСМ-020, предназначенное для управления манипуляторами с электрическими и гидравлическими приводами, имеющими до 8 одновременно управляемых степеней подвижности. Электронная память этого устройства рассчитана на 512 команд, но может быть увеличена до объема, хранящего 4096 команд. При обучении допускается формирование кадров переменной длины.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'