9.3. Контурные системы программного управления
Это наиболее сложные и наиболее универсальные программные системы, в которых управление роботом ведется уже не по дискретным точкам позиционирования, а по непрерывным траекториям. Причем сами траектории задаются путем обучения ПР и запоминаются в памяти последовательности в непрерывной или дискретной форме. В последнем случае непрерывность позиционирования обеспечивается линейной или круговой интерполяцией участков траектории между ее фиксированными в памяти значениями (опорными точками).
Структура такой системы управления может быть представлена в виде, изображенном на рис. 9.3. В отличие от позиционной системы здесь имеется более мощная память последовательности и времени, заполняемая не только оператором с пульта управления, но и автоматически с выходов датчиков звеньев манипулятора в режиме обучения. В общем случае в этой памяти хранится информация о траектории и о параметрах Qтj, определяющих требуемые режимы ТО. Блок непрерывного позиционирования осуществляет отработку заданной траектории в режиме слежения. В том случае, когда в памяти последовательности и времени хранится информация лишь об опорных точках траектории, блок непрерывного позиционирования должен содержать интерполятор, осуществляющий необходимые вычисления.
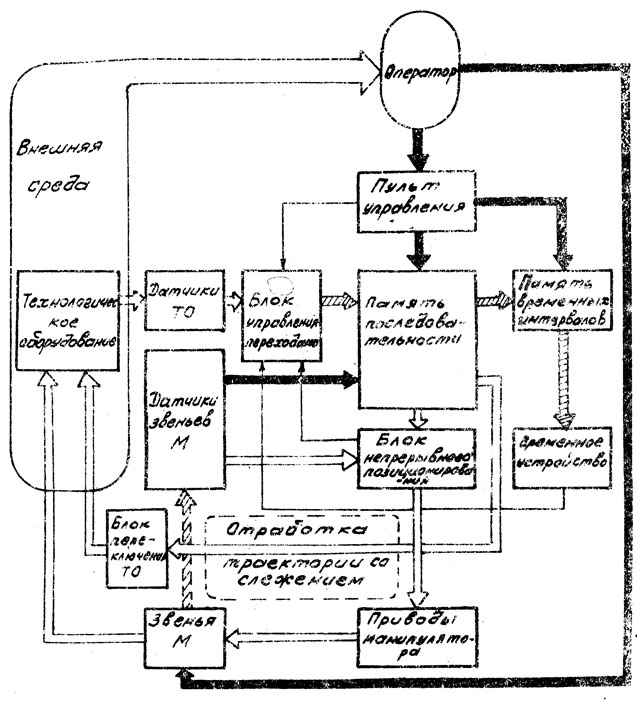
Рис. 9.3
В режиме обучения оператор, непосредственно воздействуя на уравновешенные звенья манипулятора, проводит схват по требуемой траектории S(t). Манипуляционная система вместе с датчиками воспроизводит решение обратной кинематической задачи Q(t) = F-1[S(t)]. Поэтому снимаемые с датчиков компоненты вектора Q(t) записываются в память последовательности в качестве информации о траектории. Одновременно с заданием требуемой траектории S(t) оператор с пульта управления вносит в память временных интервалов информацию о скоростях отработки тех или иных участков траектории S(t), а в память последовательности заносит требуемые значения Qтj управления режимами ТО.
В процессе отработки информация о траектории извлекается в темпе, определяемом временным устройством и блоком непрерывного позиционирования. Блок непрерывного позиционирования организует отработку траектории со слежением, а извлекаемая из памяти последовательности информация о значениях Qтj поступает в соответствующие моменты времени на блок переключения ТО и осуществляет управление им. Кроме того, на режим извлечения информации из памяти последовательности влияет состояние датчиков технологического оборудования.
Ввиду того, что подобные системы управления в общем случае должны не только реализовать отработку траектории захвата, но и осуществлять многоальтернативное и многовариантное взаимодействие робота с технологическим оборудованием, при их построении целесообразно использовать современную вычислительную технику. Например, серийно выпускаемые контурные системы управления типов УКМ-552, УКМ-772 для ПР, осуществляющих покраску, электродуговую контурную сварку, сборку и т. п., выполнены на основе микроЭВМ "Электроника-60". В последние годы широким фронтом ведутся работы по использованию в робототехнике микропроцессоров и персональных компьютеров. В связи с этим дальнейшее совершенствование систем управления промышленных роботов связано не только с разработкой эффективных модульных манипуляционных и приводных исполнительных устройств ПР, но и с разработкой и использовании ем компактных, надежных, недорогих вычислительных устройств, таких как, микропроцессоры, микроЭВМ, персональные компьютеры с соответствующим программным обеспечением.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'