Робот - система систем
Мы уже говорили, что промышленные роботы в производстве выполняют функции, аналогичные двигательным функциям человека. И хотя основная задача роботов - перемещение в пространстве предметов производства и (или) технологической оснастки, функции эти весьма разнообразны. В самом деле, область применения роботов сегодня - это кузнечно-прессовое и литейное производство, электросварка, окрасочные и сборочные операции, механическая и термическая обработка металлов, изготовление деталей из пластмасс, транспортно-складские операции и др. Разнообразие технологических операций, геометрических форм и размеров объектов производства, траекторий движения исполнительных органов является причиной того, что робот должен иметь широкие функциональные возможности, в первую очередь это относится к тем двигательным функциям, которые он должен выполнять.
Разнообразие и сложность двигательных функций робота зависят от кинематической избыточности его исполнительной системы. Именно исполнительная система обеспечивает воздействие робота на объекты производства и перемещает их в пространстве в ходе технологического процесса. Под исполнительной системой промышленного робота понимается механизм, состоящий из рабочего органа, манипулятора (или манипуляторов), устройства передвижения (транспортировки) робота и привода. Если провести аналогию между органами человека и конструкцией робота, то манипуляторы выполняют функции рук человека, а устройство передвижения - ног. Конечности человека, его "исполнительные органы", приводятся в движение мышцами. У робота аналогичной по функциям энергетической системой является привод, преобразующий энергию в движение его исполнительных органов.
Стремление к расширению функциональных возможностей робота, повышению его универсальности, гибкости приводит к усложнению в первую очередь исполнительной системы и системы управления. Например, в часовом производстве на операциях сборки широко используются простейшие роботы с двумя степенями подвижности. Такой робот берет деталь, поступающую на позицию загрузки из вибробункера, перемещает ее к платине часов, поступающей на позицию сборки по конвейеру, и устанавливает деталь на платину. Расположение детали на позиции загрузки и платины постоянно; поэтому траектория перемещения детали всегда одинакова, и передвигать детали по другим траекториям робот просто не может: такова конструкция его исполнительных органов. Управлять подобным роботом поэтому очень несложно: необходимо только задавать команды включения приводов одной или другой степени подвижности робота в нужном порядке.
Если сравнить с этим роботом окрасочный робот "Контур-002" (рис. 4), можно убедиться, насколько сложнее у него и конструкция манипулятора, и система управления. Конструкция манипулятора позволяет в пределах рабочей зоны перемещать краскопульт по любой траектории, изменяться может также и скорость его перемещения. А при окраске какого-либо конкретного изделия краскопульт должен перемещаться по вполне определенной траектории и с заданной скоростью. Именно система управления и позволяет обеспечить однозначность поведения робота при выполнении конкретных технологических операций. Эта однозначность задается управляющей программой.
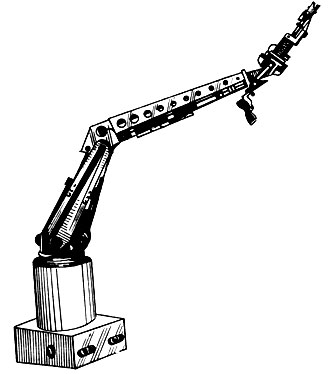
Рис. 4. Окрасочный промышленный робот 'Контур-002'
При создании и внедрении робототехнических систем в производство сосуществуют две тенденции. Одна из них - стремление к максимальной организации производственной среды и тем самым к уменьшению разнообразия внешней среды робота. При таком подходе снижаются требования к функциональным возможностям робота и, следовательно, уменьшается сложность самих роботов. Другой тенденцией является оснащение роботов средствами, позволяющими им приспособиться, адаптироваться к изменениям производственной среды. Информационная система робота позволяет воспринимать изменения как внешней среды, так и внутреннего состояния робота, осуществить предварительную обработку этой информации и передать ее системе управления робота в целях выработки соответствующих управляющих воздействий для его исполнительных органов.
Итак, промышленный робот представляет совокупность трех взаимодействующих систем: исполнительной, информационной и управляющей. В дальнейшем мы рассмотрим эти системы более подробно.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'