3. Структурные схемы роботов
Структурные схемы информационных роботов могут быть разделены на две части. Одна из них составляет пульт управления, другая - собственно робот. В последующих схемах это разделение условно обозначается пунктирной вертикальной линией, слева от которой расположена база устройства, справа - устройство собственно робота.
В действительности линия разделения часто является обозначением перехода от одной среды, в которой территориально расположен пункт управления, к другой, в которой функционирует собственно робот. Это и определяет конструктивные решения узлов робота в зависимости от условий эксплуатации, а именно: герметичность, работоспособность при высоких и низких значениях давлений, температур и т. д.
Конструктивно информационный робот представляет собой устройство, часть узлов и систем которого смонтирована на подвижной платформе. В соответствии с этим строятся структурные схемы, включающие обычно три основных устройства: управляющую и исполнительную системы, а также механизм пространственного перемещения. Между пунктом управления (базой) и роботом должны существовать каналы связи, которые в основном решают следующие задачи:
1) передачу в сторону управляющего пункта информации, собранной с помощью робота;
2) передачу управляющей информации с базы на робот;
3) энергоснабжение систем, установленных на роботе.
Для передачи информации от диспетчерского пункта (ДП) к роботу и обратно используются средства связи, телеметрии, телевидения др.
На пункте управления находится оператор. В его руках концентрируется оперативное управление всем процессом. Чтобы принять соответствующее решение и передать необходимую команду, оператору приходится воспринять и обработать большое количество информации, иногда в очень короткий промежуток времени. От способов приема и передачи информации зависит скорость и степень переработки информации человеком-оператором.
Обработка информации может быть прямой, если она полностью производится оператором, обладающим соответствующей подготовкой и интуицией, чтобы осуществить ее. Однако обилие информации и высокая скорость ее обработки в ряде случаев требуют передать часть информации для обработки автоматическим и вычислительным устройствам.
Обмен информацией между пунктом управления и роботом может осуществляться по линиям проводной или кабельной связи и по радио и телеканалам. При разработке роботов, имеющих малую удаляемость от базы, не возникает существенных трудностей с созданием каналов связи. Однако трудности существенно возрастают при увеличении "радиуса" действия информационного робота.
В зависимости от структуры построения общей схемы и формы связи между отдельными блоками информационные роботы могут быть разделены, на следующие группы:
а) манипуляционные роботы;
б) полуавтоматические манипуляционные роботы с дистанционным управлением и телеконтролем (моботы);
в) автоматические роботы с программирующими устройствами или автоматические подвижные системы;
г) автономные роботы.
Кратко рассмотрим характерные особенности и структурные схемы роботов каждой из перечисленных групп.
На рис. 1 представлены две основные структурные схемы манипуляционных роботов.
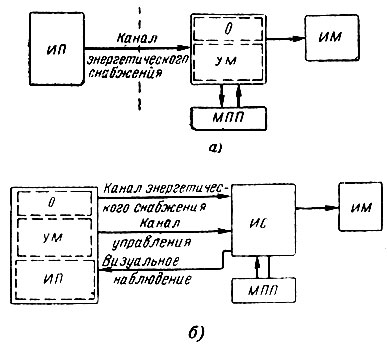
Рис. 1. Структурные схемы манипуляционных роботов. ИП - источник питания; О - оператор; УМ - управляющая машина; МПП - машина пространственного перемещения; ИМ - исполнительная машина; ИС - исполнительная система управляющей машины
Принципиальное отличие между ними состоит в размещении оператора, являющегося основным звеном в цепи управления манипуляционными роботами. Функцией оператора является обеспечение контроля (путем непосредственного визуального наблюдения) и управления роботом.
В первом случае оператор размещен непосредственно в кабине, расположенной на роботе (рис. 1, а). Здесь же размещается и пульт, с которого оператор осуществляет управление механизмом пространственного перемещения МПП и исполнительными машинами ИМ (например, манипулятором), комплексом измерительных устройств и др. Слева от линии разделения в этом случае находятся только источники энергетического снабжения ИП. С линией робот связан лишь одним каналом энергетического снабжения (КЭС). Эта связь при наличии на роботе самостоятельных источников питания (аккумуляторов, генераторов и двигательных установок) может быть временной или вообще отсутствовать.
Другая структурная схема (рис. 1, б) манипуляционного робота относится к случаю, когда оператор расположен на пункте управления слева от линии разделения (а не на роботе). Здесь же находятся пункт управляющей системы и источники питания. Кроме каналов энергетического снабжения, робот связан с пунктом каналом управления. В такой схеме контроль осуществляется визуальным наблюдением. Роботы, выполненные по этой схеме, связаны обычно с базой кабельной линией. Управляющая машина, пульт которой находится на пункте управления, частично расположена и на самом роботе, где находятся ее исполнительные устройства.
Следует отметить, что первый вариант имеет менее сложную управляющую систему и более удобен при работе, когда предусматривается визуальный контроль.
Группа полуавтоматических дистанционных роботов (моботов) представлена двумя структурными схемами (рис. 2). В обоих вариантах схем предусматривается дистанционное управление - оператор находится на пункте управления. Телеконтроль (главным образом телевизионный и телеметрический) осуществляется как за объектом, так и за самим роботом. Канал энергетического снабжения может быть постоянным или временным при наличии на роботе индивидуальных источников питания.
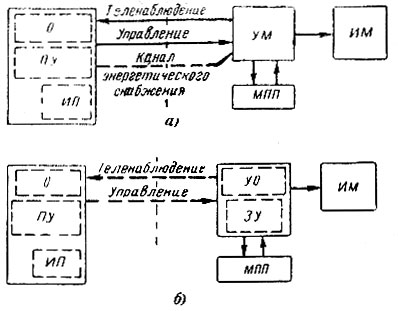
Рис. 2. Структурные схемы полуавтоматических дистанционных роботов (моботов). ПУ - пульт управления; УО - устройство обучения; ЗУ - запоминающее устройство. (Остальные обозначения те же, что и на рис. 1)
Отличие схемы, представленной на рис. 2, б, от схемы, представленной на рис. 2, а, заключается в использовании запоминающего устройства, позволяющего автоматизировать часть операций, а также в наличии устройств преобразования и первичной обработки информации. Управление таким автоматом является более удобным и менее утомительным для оператора. На диспетчерском пункте кроме пульта управляющей машины могут быть размещены устройство для обучения и вычислительное устройство преобразования информации. "Исполнительная часть управляющей машины, как и у манипуляционных роботов, находится непосредственно на роботе и выполняет две функции: управление системой пространственного перемещения и исполнительными устройствами.
Благодаря наличию программирующего устройства моботы обладают существенным преимуществом, которое заключается в возможности автоматизации всех повторяющихся циклических процессов манипулирования, получения информации и пространственного перемещения.
На рис. 3а представлена структурная схема роботов, которая объединяет сравнительно несложные автоматы с программирующими устройствами, обладающими ограниченной манипуляционной способностью. В этом случае имеется в виду применение в качестве исполнительных механизмов устройств, автоматически выполняющих цикл однотипных операций измерения, контроля, манипулирования и др. Такие простейшие роботы-автоматы широко используются в промышленности, и им можно дать более точное название - манипуляционные автоматы. Они являются полностью детерминированными системами. В литературе описано большое количество таких устройств. Этой схеме удовлетворяет простейший робот, который имеет "руку", выполняющую ограниченное число движений. Чтобы "научить" робот выполнять определенную работу, оператору предварительно необходимо собственноручно произвести манипулятором все операции для записи в устройствах памяти программы работы манипулятора. Зафиксированный цикл работы затем в точности воспроизводится автоматом без участия оператора, выдерживая заданную периодичность. Возможно аналогичное обучение информационного робота осуществлению различных траекторий движения, что позволяет с помощью робота производить более сложные операции, как, например, сварку и вычерчивание фигур.
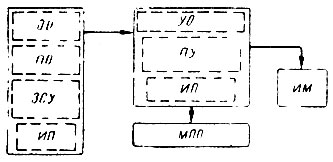
Рис. 3а. Структурная схема автоматического робота. ОО - обучающий оператор; ПО - пульт обучения; ЗСУ - задающее и синхронизирующее устройство; УО - устройство обучения; ПУ - программирующее устройство. (Остальные обозначения те же, что и на рис. 1)
Манипуляционные автоматы снабжаются различными системами программного управления. Ниже в качестве примера рассматривается одна из систем программного управления, которая может быть применена в манипуляционных автоматах, функционирующих в рабочем пространстве ограниченных размеров [Л. 51].
Отличительной особенностью системы является дискретное определение координат мобильного агрегата, которое осуществляется в отдельных точках рабочего пространства с помощью бесконтактных неподвижных датчиков. При этом точность остановки автомата лимитируется габаритами датчика. Так как информация о положении манипуляционной системы снимается дискретно, облегчается преобразование линейной координаты в двоичный числовой код и появляется возможность вырабатывать команды управления движением системы путем обработки полученной информации в цифровом вычислительном устройстве. Блок-схема программного управления механизмами перемещения мобильной платформы представлена на рис. 3б.
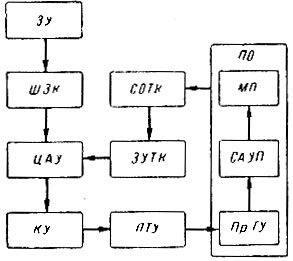
Рис. 3б. Блок-схема системы программного управления манипуляционным устройством. ЗУ - задающее устройство; ШЗК - шифратор заданной координаты; ЦАУ - цифровое арифметическое устройство; КУ - командное устройство; ПО - подвижный объект; СОТК - система определения текущей координаты; ЗУТК - запоминающее устройство текущей координаты; ПТУ - передающее устройство системы телеуправления; ПрТУ - приемное устройство системы телеуправления; САУП - система автоуправления приводами; МП - механизм перемещения
Задающее устройство задает координаты точек автоматического перемещения платформы. Выбор точки, в которую должно перемещаться манипуляционное устройство, производится вручную с помощью переключателя. Выдача задающим устройством новой координаты точки одновременно является командой на движение автомата. Задающее устройство соединено с шифратором заданной координаты, который преобразует координаты заданной точки в двоичный числовой код.
Количество разрядов двоичного числа, необходимых для представления координаты любой точки, зависит от количества кодируемых координат и точек М и выражается формулой

где n - количество разрядов двоичного числа.
Устройство, с помощью которого определяется положение мобильной платформы, включает ключевой автогенератор электрических колебаний с излучающей катушкой, индуктивность которой совместно с емкостью образует колебательный контур, приемные катушки, неподвижно установленные по пути следования автомата, и распределенный шифратор текущей координаты. Ключевой автогенератор с излучающей катушкой монтируется на мобильной платформе. При движении автомата в тот момент, когда излучающая катушка оказывается в непосредственной близости от приемной, в последней генерируется переменная э. д. с, частота которой равна частоте генерации генератора. Переменная э. д. с. детектируется и посредством шифратора преобразуется в двоичный числовой код, который соответствует номеру неподвижной приемной катушки.
В работе [Л. 51] даются рекомендации целесообразной технической реализации детектора, шифратора и ключевого автогенератора электрических колебаний и т. п.
Запоминающее устройство предназначается для хранения числового кода координаты мобильной платформы агрегата на время ее перемещения от одного датчика к другому и преобразования этого кода из импульсной формы в потенциальную.
Для того чтобы при исчезновении питающего напряжения информация о положении мобильной платформы манипулятора не терялась в запоминающем устройстве, рекомендуется [Л. 51] использовать двухпозиционное поляризованное реле с преобладанием и достаточным для системы быстродействием. Двоичный код текущей координаты подается на входы запоминающего устройства и цифрового арифметического устройства.
При наличии схемы автоматического управления асинхронными электроприводами для автоматического управления движением автомата достаточно вырабатывать следующие команды управления: "вперед", "назад", "малая скорость", "стол".
Заданная и текущая координаты кодируются двоичными числами. Поэтому управляющие команды вырабатываются командным устройством, которое производит логический анализ результатов сравнения этих двоичных чисел. Цифровое арифметическое устройство производит сравнение двух двоичных чисел вычитанием одного из другого. В двоичной системе счисления операция вычитания заменяется операцией суммирования уменьшаемого с вычитаемым, представленным в дополнительном коде. Операция сложения осуществляется полным однозарядным комбинационным сумматором. Для того чтобы построить схему полного однорядного комбинационного сумматора, необходимо составить таблицу возможных комбинаций значений входных и выходных величин. В работе [Л. 51] приводится следующая таблица:
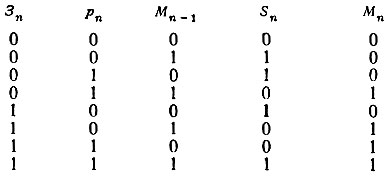
Зn - значение n-го разряда первого числа, рn - значение n-го разряда второго числа, Мn-1 - значение единицы переноса из младшего разряда, Sn - значение суммы n-го разряда, Мn - значение единицы переноса из n-го разряда в старший n+1-й разряд.
Правила сложения чисел в двоичной системе счисления определяют значения выходных величин. Входных величин три, поэтому число комбинаций будет равно K = 2m, где m - число входных величин равное трем, т. е. K = 23 = 8. Минимальные многочлены для выходных величин Sn и Мn выписываются на основе метода синтеза логических схем. Логическое уравнение схемы получают суммированием минимальных многочленов. Согласно приведенной выше таблице


После преобразования логических равенств (1), (2) получают:

Написанная система логических уравнений позволяет построить контактную схему комбинационного сумматора. Для построения бесконтактной схемы одноразрядного комбинационного сумматора логические уравнения (1) и (2) приводят к виду

На основе результатов анализа вычитаний числа р - текущей координаты автомата из числа три - координаты заданной точки остановки составляют логические уравнения команд:
"стоп"

"малая скорость"


"вперед"
"назад"

Для построения бесконтактной схемы командного устройства уравнения (5)-(8) преобразуют следующим образом:



Как рекомендовано в работе [Л. 51], при использовании рассмотренной системы программного управления для мобильных устройств, обладающих значительной скоростью перемещения и требующих точности остановки в пределах 0,1 м, целесообразно использовать бесконтактные цифровые арифметические и командные устройства, а на выходах шифратора текущей координаты оставить усилители. При этом точность остановки будет определяться скоростью мобильного устройства при подходе к заданной точке и временем отработки команды системы управления асинхронным электроприводом. В случае, если требуется повысить точность остановки, целесообразно для мобильных агрегатов применять электропривод постоянного тока, а для выработки в непрерывной форме управляющих воздействий использовать в качестве источника информации о положении мобильного агрегата непрерывную следящую систему.
На рис. 4 дана развернутая структурная схема автоматического робота, уже не являющегося полностью детерминированным устройством. В нем используются элементы и приемники для самостоятельного (независимого) сбора и обработки информации. Собственно робот и пункт управления связаны кабельным или радиоканалом связи. На пункте управления предполагается размещение аппаратуры управления, "обучения", источников энергии, а также передающей и приемной аппаратуры телеуправления и телевизионной системы. Здесь же находится оператор, основная функция которого заключается в наблюдении и контроле за правильным функционированием систем робота, а также в передаче или корректировании программы действия.
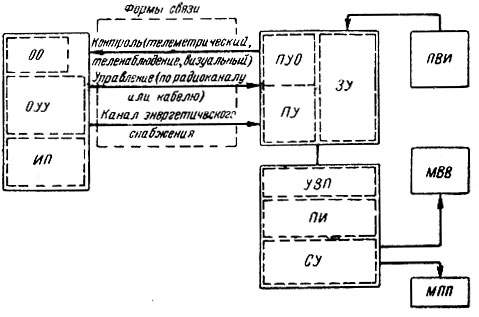
Рис. 4. Развернутая структурная схема автоматического робота. ОУУ - обучающее и управляющее устройство; ПУО - подъемное устройство для обучения; ЗУ - запоминающее устройство приемников независимой информации; ПВИ - приемники внешней информации; УВП - устройство выбора программы (логико-вычислительное); ПИ - преобразователь информации; МВБ - машина внешнего воздействия (манипуляторы и др.); СУ - система управления МВБ и МПП
Информация управления и обучения поступает на приемное устройство телеметрической системы. В случае "обучения" сигналы поступают на программирующее устройство. Когда же поступают управляющие сигналы, то они, минуя программирующее устройство, попадают на преобразователь информации и затем непосредственно на машину внешнего воздействия и пространственного перемещения.
Для работы на больших расстояниях от пункта управления, а также в тех случаях, когда из-за помех или других причин невозможно поддерживать надежную связь ро радиоканалу, для управления информационными роботами могут быть использованы программные устройства. Управляющий канал в этом случае используется ограниченно: либо для передачи команд ввода в действие, либо для остановки собственно робота (рис 5). Система управления таких роботов действует с определенной периодичностью, которая задается программирующим устройством.
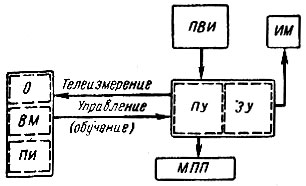
Рис. 5. Схема автоматического информационного робота с ограничением по каналу управления. ВМ - вычислительная машина; ПИ - приемник информации; ПВИ - приемник внешней информации; ПУ - программирующее устройство; ЗУ - запоминающее устройство
Информация либо только регистрируется, если предусматривается возврат робота, либо передается по радиоканалу на пункт сбора. Несколько отличаются от рассмотренных автоматических роботов автономные информационные устройства, которые, являясь неуправляемыми автоматами, содержат заранее составленную программу - задание циклического характера. Блок-схема таких информационных роботов показана на рис. 6.
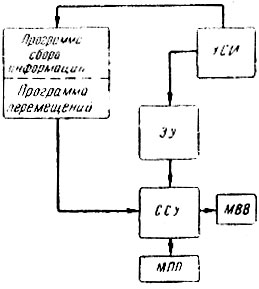
Рис. 6. Схема автономного информационного устройства. УСИ - устройство сбора информации; ЗУ - запоминающее устройство (информационное); ССУ - схемы систем управления; МПП - машина пространственного перемещения; МВВ - машина внешнего воздействия
Несколько слов следует сказать об элементах самоорганизации в роботах.
Изучение живых организмов показывает, что существуют два вида их поведения. Одно из них, которое обычно называют макроповедением, характеризует поведение в целом при взаимодействии с внешней средой. Другое - микроповедение характеризуется наличием внутренней устойчивости по отношению к изменениям внешней среды. Примерами могут служить различные регулирующие характеристики при значительном изменении внешних условий (свойство гомеостазиса при регуляции температуры, давления крови и т. п.).
Общим для всех таких систем является поддержание неизменными значений регулируемых величин при большом числе разнообразных внешних источников возмущений, а также наличие местных изменений, обеспечивающих приспособляемость к изменяющимся условиям при сохранении целостности всей системы. Подобные системы, получившие название самоорганизующихся, представляют взаимосвязанный и взаимовлияющий комплекс систем.
Для описания поведения самоорганизующихся систем пользуются понятием фазового пространства. Совокупность значений обобщенных (фазовых) координат в момент времени t полностью характеризует состояние системы в этот момент. Изменение поведения системы характеризуется изменением по крайней мере одной из координат, причем дискретное изменение параметра приводит к соответствующему изменению положения изображающей точки, а изменение параметров во времени влечет за собой перемещение изображающей точки в фазовом пространстве по линии, называемой фазовой траекторией [Л. 1].
Всякий организм или автоматическая система поддерживает значения параметров (обобщенных координат) в пределах области существования системы, выход за пределы которой ведет к разрушению системы. Внутри области существования всегда можно выделить область нормальных состояний. В период воздействия возмущающих факторов система изменяет свое состояние, переводя значение параметра по некоторой траектории. В самоорганизующихся системах эта траектория изменения параметра, отвечающая возмущению, влечет за собой такое изменение всех параметров и структуры, при котором изображающая точка входит внутрь области нормальных состояний. Самонастраивающаяся система имеет возможность оценивать свое состояние и воздействие среды, и в случае необходимости менять режимы и структуру системы.
На основе исследования поведения систем можно выделить среди них несколько различных типов:
1. Простейший пример полностью детерминированной системы представляет собой робот с программирующим устройством. Для таких систем в каждый момент времени известно, какие изменения в них произойдут, какие будут произведены переключения в настройке и структуре.
2. Другой тип - это недетерминированные системы, т. е. такие, о которых заранее неизвестно, к какому результату приведет определенное изменение параметров и структуры и какие при этом действовали возмущающие факторы.
Модификация (изменение) такой системы в процессе приспособления ее к внешним условиям осуществляется обычно путем "случайного поиска" с оценкой результата по принципу "проб и ошибок". В этом случае при переходе изображающей точки через контур переключения случайным образом осуществляется одна из возможных модификаций системы. Этот процесс переключений продолжается до тех пор, пока не будет найдено такое состояние системы, при котором изображающая точка будет оставаться в пределах контура переключений.
Изменение внешних условий может заставить систему снова изменить свои параметры.
Классификацию недетерминированных систем можно продолжить, приняв за критерий случайное переключение при переходе изображающей точкой контура переключения, а именно:
а) системы, у которых при переключении вероятность выбора любого варианта неизменна;
б) системы, у которых вероятность выбора варианта переключения зависит от настоящего состояния системы;
в) системы с несколькими ступенями переключений.
Детерминированные системы регулирования и управления, применяемые для автоматизации производственных процессов, в настоящее время хорошо изучены. Они используются в схемах управления информационными автоматами. Недетерминированные системы изучены гораздо меньше, и применение их в системах управления информационными автоматами осуществляется в комбинациях с детерминированными схемами управления.
Простейшую структурную схему недетерминированной системы обычно представляют, как показано на рис. 7, а, в виде двух связанных устройств: преобразователя информации и модификатора, который осуществляет перестройку режимов работы преобразователя.
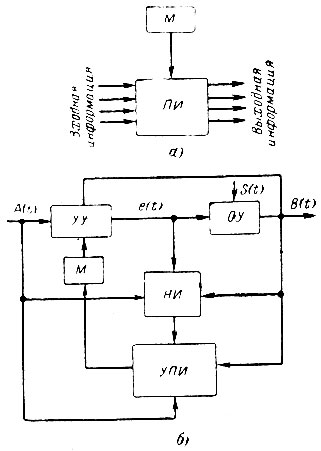
Рис. 7. Простейшие структурные схемы недетерминированных систем. М - модулятор; ПИ - преобразователь информации; УУ - управляющее устройство; ОУ - объект управления; НИ - накопитель информации; У ПИ - устройство преобразования информации (логико-вычислительное)
Анализируя функции отдельных устройств самоорганизующейся системы, можно развернуть ее структурную схему (рис. 7, б). Информация A(t) поступает в устройство управления, в котором вырабатывается сигнал е(t), учитывающий реакцию системы В(t). Одновременно A(t), e(t), B(t) запоминаются в накопителе и анализируются устройством преобразования. В результате анализа вырабатываются сигналы ε(t), управляющие модификатором М.
В общем случае эта система может быть многоступенчатой, однако структуры всех составляющих будут аналогичны.
Рассмотрим несколько примеров использования перечисленных систем управления. Схема выполнения операции роботом с программирующим устройством предусматривает четкую фиксацию в исходной позиции как самого робота, так и объекта исследования.
Использование схем поиска и "ощупывания" деталей позволяет намного усложнить возможные операции, уменьшив, с другой стороны, требования по взаимной ориентации объектов исследования и автомата. В этом случае автомат и объект исследования могут быть взаимно не ориентированы и расположены в любом положении и в любом месте в пределах действия автомата. В случае отсутствия "зрительного анализатора" щуп или сама "рука" манипулятора может осуществлять сканирующее движение и поиск предмета. После окончания поиска следует операция распознавания. Такое же сканирующее движение позволяет роботу определять форму предмета.
Если робот снабжен "зрительным анализатором", процесс поиска, распознавания ведется по оптическому каналу, а лишь затем включается в действие механическая "рука".
Созданием такого рода устройства занимались исследователи Массачусетского технологического института. Построенный ими макет манипуляционной системы с автоматическим управлением, названный "рукой Эрнеста", может взаимодействовать с внешней средой, собирать и обрабатывать информацию и вырабатывать программу своей деятельности. В пределах доступных ему операций автомат является недетерминированной системой и способен по команде выполнять определенные операции, исходя из собственного "опыта". Выполнение этих функций требует комплекса устройств, среди которых исполнительные устройства, предназначенные для воздействия на внешнюю среду; аппараты, аналогичные органам чувств, позволяющие собирать информацию об этой среде; вычислительные машины для обработки информации; системы управления, связывающие вычислительные машины с механической частью системы и датчиками. Такая система должна позволить автомату организовать "собственный опыт" сообразно с внешней средой, в которой ему предстоит действовать.
"Рука Эрнеста" выполняла различные задания. Например, программа "собрать кубики в коробку" предусматривала следующие операции:
поиск коробки на столе; определение положения коробки относительно манипулятора. В различных вариантах предусматривались ориентация коробки и ее перенос; поиск кубиков; определение положения кубика; захват кубика; перенос кубика; размещение кубика в коробке; возвращение в позицию, на которой был найден предыдущий кубик, и продолжение поиска.
Для осуществления поиска устройство захвата манипулятора оснащено датчиками (рис. 8), которые выполняют функции "органов чувств" автомата. Нахождение объекта между губками регистрируется датчиками 4. Шесть контактных датчиков 6 определяют контактирование внешней стороны губки с объектом. Датчик 3 регистрирует соприкосновение манипулятора со столом. Все эти датчики работают в двоичном коде. Датчики 1 с непрерывным входом реагируют на затемнение от объектов. На внутренней стороне губок размещены датчики давления 5, определяющие положение захваченного объекта и степень сжатия. Датчиками давления 2 регистрируется нахождение объекта вне губок захватного устройства при контактировании с передней стороной губок.
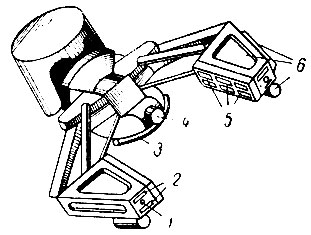
Рис. 8. Макет недетерминированного информационного робота
Управление автоматом осуществлялось вычислительной машиной ТХ-О "память" которой, кроме вышеперечисленных компонентов программы, хранит различные подпрограммы, включающие список команд для осуществления движения манипулятора, варианты последовательности передачи команд, "модели" объектов реального мира (например, сведения о геометрических формах кубиков и коробки) и т.п. Подпрограммы описывают состояние всех чувствительных элементов и сравнивают конечный результат с желательным состоянием автомата после выполнения данной подпрограммы. Можно провести некоторую аналогию между подпрограммами движений автомата и соответствующими устойчивыми стереотипами движений человека.
Оценивая после осуществления данной подпрограммы состояние всех чувствительных элементов, вычислительная машина выбирает ту или иную следующую подпрограмму.
"Модели" и подпрограммы, составляющие "интеллект" автомата, позволяют ему в случаях нарушения хода работы решать логические задачи. Так, автомат восстанавливает положение коробки, если она бывает умышленно смещена или перенесена в другое место на столе. Однако логические задачи могут оказаться' для автомата слишком сложными, и он принимает в ряде случаев логически ошибочные решения.
Хотя способности "руки Эрнеста" к решению логических задач весьма ограничены и она способна совершать простейшие операции манипулирования лишь с неподвижными объектами, она является высокоорганизованным автоматом по сравнению с манипуляторами других типов и показывает, какие проблемы стоят на пути создания роботов.
Весьма сложной является также проблема оптимального распределения функций в рамках всей системы между человеком и автоматом. При создании роботов или манипуляторов эту проблему можно будет считать принципиально разрешенной тогда, когда можно будет располагать оценкой, позволяющей в каждом конкретном случае выбирать оптимальный вариант такого распределения. Так как при распределении функций между человеком и автоматом приходится считаться с рядом факторов различной значимости, необходимо взять за основу комплексную оценку, учитывающую оценки по отдельным факторам и их относительную значимость [Л. 2].
В качестве такой общей оценки может быть принято соотношение вида

где J1, J2, ..., Jn - оценки по отдельным показателям.
В число этих частных оценок, по-видимому, должны войти: эффективность управления, его надежность, стоимость аппаратуры, утомляемость оператора и т. д. Решение проблемы оптимального распределения функций требует детального изучения и должно опираться на исследование взаимосвязи между операторской способностью человека и особенностями управления различными системами роботов. Обе "части" системы имеют свои преимущества и недостатки и "способны" взаимно дополнять друг друга.
При распределении функций между человеком и автоматом необходимо исходить из того, что автомат может выполнять отдельные операции лучше, чем человек. Как правило, это операции, требующие для своего осуществления большой силы, скорости, выносливости и методичности действия.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'