Глава вторая. Применение информационных роботов
4. Роботы для космических исследований
Идея исследования планет с помощью управляемых на расстоянии роботов не является новой. Возможность осуществления этой идеи становится все более реальной в связи с успехами, достигнутыми в ряде смежных областей техники, и в том числе в области осуществления надежной дальней связи и создания систем для дистанционного управления. За последние годы неоднократно осуществлялась дальняя радиосвязь с космическими аппаратами и зондами, запущенными в космическое пространство в различных направлениях.
Большой опыт, накопленный при разработке промышленной автоматики и аппаратуры для научно-исследовательских целей, послужил основой для создания компактных автоматических устройств для получения разнообразной информации с помощью космических исследовательских аппаратов.
На I Международном симпозиуме по исследованию космического пространства, который состоялся в Ницце в январе 1960 г., сообщалось о методе взятия проб при помощи автоматического собирающего устройства, предназначаемого для доставки соответствующих проб к специальному телевизионному микроскопу, который передавал бы снимки микроорганизмов, существующих на исследуемой планете. Такой планетой мог бы быть Марс, где по некоторым признакам возможно существование живой материи. Полученные пробы позволили бы отделить живые клетки от минеральных частиц путем селективной флотации в густых жидкостях. Предполагалось также, что автомат будет иметь прозрачную ленту с нанесенными на нее образцами, медленно перемещающуюся перед объективом телевизионного микроскопа.
Зарубежные программы исследований Луны, Марса, Венеры и других планет предусматривают создание и использование перемещающихся по поверхности информационных роботов. При этом разрабатываются как автоматические информационные системы, автономно перемещающиеся по исследуемой поверхности, так и специальные обитаемые самодвижущиеся исследовательские системы. В США разработан проект подвижной геологической лаборатории, которая должна передвигаться по лунной поверхности на четырех надувных колесах. Герметичная кабина лаборатории снабжается некоторыми манипуляционными устройствами.
Лаборатория предназначена для изучения местных магнитных полей, атмосферы, изучения характера поверхности Луны и ее недр. Для этого используются различные приборы, в том числе телевизионная аппаратура, спектрометр, сейсмометр, магнитометр и т. п. В ряде проектов предполагается также установить бурильное устройство, рассчитанное на проникновение в лунный грунт на глубину 0,5-1 м. При бурении небольшие кусочки лунной породы направляются к специальному оборудованию, которое производит их химический анализ. Телевизионная камера позволяет операторам осуществлять контроль над процессами сбора образцов, перемещения лаборатории и операциями анализа образцов.
В феврале 1966 г. впервые было осуществлено прилунение автоматической станции "Луна 9" при помощи системы мягкой посадки. Автоматическая станция представляла собой герметический контейнер, в котором находились бортовая радиосистема, программно-временное устройство, система терморегулирования, научная аппаратура, источники питания, телевизионная аппаратура кругового обзора. Телевизионная аппаратура позволила получить первые снимки лунной поверхности, сделанные в непосредственной близости.
На новом этапе исследования Луны будут, по зарубежным данным, применены самодвижущиеся аппараты, способные собирать информацию при перемещении по поверхности. Известны две возможные схемы построения самодвижущегося информационного автомата. Одна предусматривает перемещение по поверхности планеты доставленного туда космического аппарата. В другой схеме предусматривается отделение информационного робота от основного аппарата, на котором установлена большая часть аппаратуры управления, навигации и связи с Землей. Подвижный робот будет предназначаться для сбора образцов, фотографирования, бурения поверхности и т. п. Проект космического аппарата, получивший наименование "Проспектор", представляет собой передвижную лабораторию, установленную на специальное шасси с надувными колесами больших размеров (рис. 9а). Управление такой системой должно осуществляться оператором на расстоянии. Возможности сбора информации в таких устройствах по сравнению с возможностями неподвижных устройств при дальности исследовательских маршрутов порядка 80-100 км будут значительно большими [Л. 8].
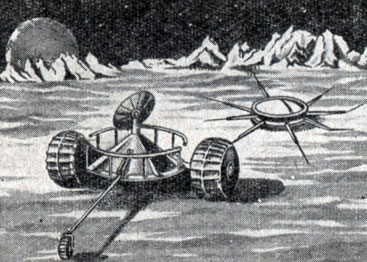
Рис. 9а. Передвижная лаборатория для исследования лунной поверхности
Разработан ряд методов просмотра и исследования поверхности с помощью одного или комплекса самодвижущихся информационных систем. В некоторых методах при исследовании определенной поверхности с базового самодвижущегося информационного автомата после его остановки "выпускаются" небольшие информационные самодвижущиеся устройства, которые производят сканирование некоторой площади по определенной траектории с анализом ряда параметров и передачей результативных сведений на базу. При этом связь базы с информационной ячейкой и координация движений последней могут быть весьма разнообразными [Л. 8].
Рассмотрим в качестве примеров два типа самодвижущихся информационных автоматов, "выпускаемых" с базы для исследования окружающего пространства.
На рис. 9б представлен информационный робот, выполненный в виде "гусеницы". Робот состоит из пяти одинаковых секций, соединенных вместе. Он снабжен системой датчиков, информация с которых передается на базу по кабельной линии связи. Робот снабжен телевизионной системой и манипуляторами [Л. 8].
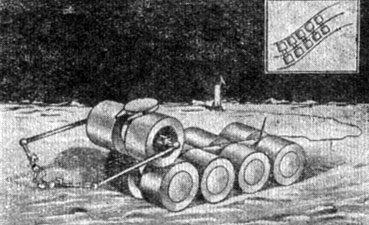
Рис. 9б. Передвижное устройство с шасси типа 'гусеница'
Устанавливаемые на информационных роботах манипуляторы предназначаются для выполнения весьма разнообразных операций. В частности, манипуляторы, установленные на рассматриваемом устройстве, при необходимости помогают роботу преодолевать различные препятствия. В этом случае "руки" манипулятора могут либо отталкиваться от грунта, либо подтягивать за собой через препятствие все шасси. Очевидно, что манипулятор должен иметь силовой привод, способный выполнять возложенные на него функции.
На рис. 10 представлена одна из разработок информационного робота шагающего типа. Робот снабжен системой датчиков, телевизионной системой и манипуляторными устройствами. На "руке" манипулятора установлена передающая телевизионная камера, что значительно расширяет ее информационные возможности. Так, приближая камеру к поверхности, можно производить визуальный анализ грунта, осматривать близлежащие предметы с нескольких сторон, а также при соответствующем положении камеры использовать ее для ориентирования робота на местности. Для выполнения других операций, связанных с получением информации в зависимости от программы исследования, устройство имеет второй манипулятор, контроль за действиями которого может также осуществляться с помощью телевизионной камеры. Перемещение этого робота осуществляется на четырех "ногах", что обеспечивает постоянное расположение центра тяжести между тремя опорами. Он может подниматься по склонам до 15° и перешагивать препятствия высотой до 10 см. Скорость перемещения от 3 до 5 км/ч. Установка имеет солнечные батареи для питания всех систем. Антенны и батареи па информационном роботе имеют две степени свободы и ориентируются: приемная антенна - для приема сигналов с Земли, плоскости батарей - перпендикулярно солнечным лучам [Л. 8].
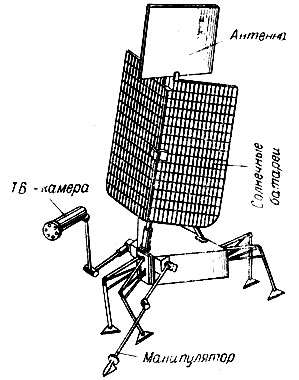
Рис. 10. Шагающее устройство для исследования поверхности Луны
Для исследования ограниченных участков ровной поверхности информационными роботами в США предложена простая схема перемещения информационной ячейки относительно базового автомата. В этом случае на базовом автомате, который располагается в центре исследуемого участка, установлена специальная опора с барабаном, на котором намотан трос. К тросу крепится самодвижущееся устройство, у которого механизм движения по поверхности имеет тенденцию удаления от центральной опоры. В то же время трос удерживает подвижное устройство около опоры на определенном расстоянии. По мере движения трос раскручивается и радиус движения тележки увеличивается. Таким образом, исследование поверхности производится по спиральной траектории до тех пор, пока весь трос не будет выбран. После этого при продолжении движения тележки трос начинает накручиваться на барабан, но в обратном направлении, и подвижная тележка будет совершать движение по сходящейся траектории к начальной точке движения. Приближением подвижной тележки к центральной опоре заканчивается цикл обзора поверхности. После этого информационная ячейка занимает свое первоначальное положение на базе и вся установка перемещается в новую область, где необходимо провести аналогичные операции исследования окружающей поверхности.
Приемники внешней информации, используемые в информационных роботах, могут быть разделены на следующие группы:
1. Телевизионная система наблюдения, информация от которой в большинстве случаев поступает на пункт управления и в системах робота не обрабатывается.
В некоторых случаях информация, поступающая по телевизионному каналу, одновременно подвергается автоматической обработке в специальных блоках с целью получения сведений об ориентации робота и о состоянии и характеристиках окружающего его пространства.
2. Радио-, гидро- и акустические локаторы, информация которых поступает на пункт управления и одновременно и независимо может быть обработана в системах, предназначенных для выработки сигналов управления машинами перемещения и внешнего воздействия. Эти потоки информации поступают на запоминающее устройство и служит также для коррекции программирующего устройства. Сигналы с программирующего и запоминающего устройств поступают на логическое вычислительное устройство выбора программы.
3. Приборы измерения физических параметров окружающей среды, информация которых может регистрироваться и в самом роботе и на пункте управления одновременно или служить также для выработки управляющих команд на исполнительные машины.
В качестве примера приборов этой группы рассмотрим возможный комплекс научно-экспериментального оборудования космического исследования автомата:
магнитомеры, определители частиц, определитель космической пыли, фотометр (с ультрафиолетовой чувствительностью), телевизионные камеры, плазменный зонд, микроволновый радиометр, инфракрасный радиометр, ионная камера, инфракрасный спектрометр, протонный телескоп (протонов высоких энергий), анализатор спектра космических лучей, ультрафиолетовый спектрометр, детектор радиошумов, нулевой искатель радиосигналов, радиолокационный высотомер.
В последнее время разработан ряд проектов самодвижущихся информационных автоматов для исследования Луны, Венеры, Марса и других планет.
На рис. 11 показаны один из вариантов подвижного информационного робота и схема его выгрузки на поверхность исследуемого космического тела. Это устройство разработано в США применительно к исследованию Марса. Управление движением робота предполагается осуществлять по радиоканалу с телевизионным контролем его движения.
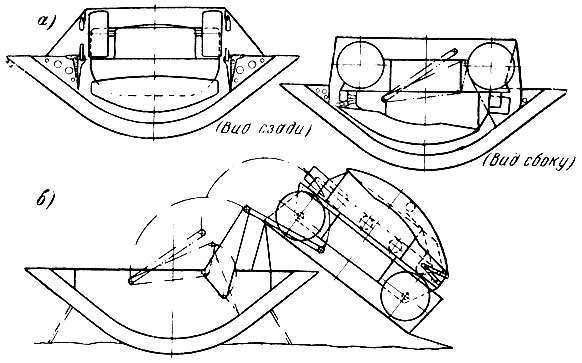
Рис. 11. Этапы выгрузки исследовательской лаборатории на поверхность Марса
Зарубежные исследования образцов информационных роботов показали, что средства обеспечения подвижности автомата даже в пределах 100 км могут составлять по весу 30% и более от его общего веса. Одной из наиболее острых проблем является проблема, связанная с электропитанием, так как энергия, отводимая на эксперименты и телепередачу информации, сильно зависит от располагаемой мощности. Наиболее перспективным типом источника питания представляется радиоизотопный термоэлектрический генератор, источник энергии должен включать буферные химические батареи, роль которых сводится к компенсированию непродолжительных изменений уровня мощности в системе.
По программе космических исследований США предусматривается проведение уже в ближайшем десятилетии исследования Марса с помощью одного или более высаженных на планету автоматических исследовательских информационных систем AMEL (Automated Mars Exploration Laboratory).
Лаборатории AMEL предназначены для проведения исследований с целью оценки условий на поверхности планеты, сбора информации о возможных формах жизни. Предполагается информационный робот доставить на Марс ракетой типа Saturn-V и осуществить спуск в атмосфере Марса с помощью специального аппарата, обеспечивающего безопасную посадку и размещение робота на поверхности планеты.
В исследовательские задачи лаборатории входит выполнение следующих операций:
изучение окружающей обстановки с помощью телевизионной системы;
передвижение в район, выбранный в результате анализа телеинформации;
обход участков, характеризующихся "тяжелым" грунтом и другими препятствиями, которые могут привести к выходу лаборатории из строя;
исследование атмосферных проб с целью определения состава газовой смеси, атмосферного давления, температуры, скорости ветра, а также видов и количества пылеобразного вещества, рассеянного в атмосфере;
взятие пробы грунта на точно установленных глубинах с последующим определением его структуры, состава, температуры, газо- и влагонаполнения;
анализ атмосферных и почвенных проб с целью обнаружения признаков жизни;
изучение поверхности планеты для выявления признаков, указывающих на существование жизни в прошлом (окаменелости и т. п.).
После того как будет осуществлена посадка на Марс исследовательской лаборатории и установлена ее связь с Землей, с лаборатории должны быть переданы панорамные телеизображения местности. Последние должны дать возможность составить общее впечатление о тех условиях на поверхности планеты, в которых находится лаборатория. Одновременно система получает и передает информацию об атмосферных условиях, что облегчает выбор последовательности запланированных экспериментов. Далее, по команде с Земли, лаборатория передвигается к какому-либо из выбранных объектов. Преодолев намеченный участок местности, лаборатория производит новую серию телепередач на Землю с целью обнаружения возможных препятствий на пути ее движения.
В результате оперативного анализа полученной Землей телеинформации намеченная траектория движения информационного робота может быть изменена. По прибытии в заданный район лаборатория должна взять пробу почвы и произвести предварительный анализ ее характеристик. После получения данных анализа на Земле принимается решение о целесообразности продолжения исследований по обнаружению жизни или о необходимости поиска более благоприятного участка.
Научное оборудование лаборатории включает три следующие категории информационных устройств:
приборы, измеряющие атмосферные характеристики;
приборы, измеряющие ареофизические и ареохимические характеристики;
приборы, измеряющие биологические характеристики.
Некоторые из этих приборов могут быть использованы в двух или во всех трех категориях.
С точки зрения возможности обнаружения микроорганизмов представляет определенный интерес изменение на поверхности парциальных давлений таких атмосферных составляющих, как, например, пары воды, озон, окись азота и т. п.
Определение суточного цикла изменения газового состава атмосферы (как, например, едва заметный суточный цикл изменения СО2 на Земле) позволит определить обменные реакции, характерные для формы жизни на Марсе. По-видимому, сильное влияние на жизненный цикл живых организмов Марса будет оказывать весьма широкий суточный диапазон изменения атмосферной температуры. Арсенал контрольно-измерительной аппаратуры, очевидно, должен включать также и приборы, предназначенные для измерения скорости ветра, размеров и массового распределения частиц пыли, рассеянных в атмосфере, изменения облачного покрова, количества аргона, соотношения изотопов водорода, кислорода и т. д.
С точки зрения ареофизических и ареохимических измерений в первую очередь представляет существенный интерес значение особенностей поверхности планеты. Необходимая информация о грунте может быть получена с помощью ортикона с панорамным обзором поверхности планеты. Увеличить количество информации можно путем использования телевизионной передачи изображений последовательно через несколько цветных фильтров, что даст возможность получить цветные фотографии грунта.
Наличие сильных ветров, пылевых облаков и широкого диапазона изменения температуры наводят на предположение о существовании поверхностного слоя мелких частиц наряду с метеоритной пылью. Отсюда вытекает необходимость определения размеров, минерального и химического состава этих частиц. Полезными методами физического анализа твердых образцов могут быть флюоресценция в рентгеновских лучах, нейтронное воздействие, дуговая масс-спетроскопия и др.
С биологической точки зрения очень важными характеристиками поверхности космических тел и подпочвенных слоев являются количество влаги, удерживаемой частицами почвы, и количества гидрата в минералах.
Масс-спектрография или газовая хроматография нагретых образцов почвы легко обеспечит требуемую информацию. Этими же методами могут быть обнаружены двуокись углерода, сера, продукты разложения органических газов и другие вещества.
Большие трудности возникают при разработке автоматических устройств определения видов минералов поверхностного слоя планет, так как такое распознавание связано с определением кристаллической структуры.
Так как к внеземным формам жизни проявляется весьма большой интерес, значительная доля приборного оборудования информативного робота приходится на приборы, предназначенные для биологических измерений, определения химических и физических условий на поверхности Марса как возможной среды для существования жизни [Л. 3]. По-видимому, для данного случая измерения целесообразно разбить на два этапа. На первом этапе предполагается производить поиски макрожизни при помощи системы панорамного сканирования с помощью передающей телевизионной системой с ортиконом. Большие растения и животные, если они будут находиться в поле зрения, могут быть легко опознаны. Модификация той же системы, оснащенной короткофокусными объективами, позволит обнаружить микроорганизмы. По-видимому, такие объекты как листья, стебли, корни и т. п., можно будет опознать на фоне почвы. Вследствие того, что живая природа будет стремиться покинуть район повышенной температуры, можно будет добиться концентрации каких-нибудь марсианских микроорганизмов, поместив образец почвы в нагревательное устройство кольцеобразной формы, диаметр которого может уменьшаться
Вторым этапом биологических экспериментов будут поиски микрожизни на поверхности или под покровом почвы.
Этот этап предполагается осуществить в следующие три последовательные фазы:
поиски микрожизни в прилегающем к лаборатории районе;
поиски микрожизни в местных условиях с применением соответствующих стимуляторов;
попытка дать характеристику какой-либо из обнаруженных форм микрожизни по ее поведению в среде земных микроорганизмов.
При проведении первой фазы преследуется цель применить только такой метод, который полностью исключает небиологические реакции, которые могут привести к фиктивным положительным результатам. По-видимому, эта проблема может быть решена исследованием стерилизованных и нестерилизованных образцов. Экспериментальными переменными при этом могут служить температура, интенсивность светового потока, содержание паров воды и др. Изменением одного из этих факторов и побуждалась бы активность обмена веществ и рост.
Вторая фаза предусматривает использование "элементарных доноров", или источников энергии, электронных ловушек и структурных моделей. Кроме вышеуказанных методов наблюдения и воздействия на обмен веществ и рост, здесь также возможно применение радиоактивных веществ.
Третья фаза включает отделение живой микроприроды от частиц неживого происхождения флотацией жидкости. Отдельные микробиологические формы можно характеризовать путем их сравнения с земными культурами. Так, например, рост в среде, которая содержит замедлитель деления, мог бы указать на сходство с земным организмом, рост которого также замедляется этим компонентом.
Требования, предъявляемые к системе автоматики и телеуправления, могут быть разделены на две группы. Первая из них включает вычислительные операции, программирование и память для управления роботом строго запрограммированным образом либо для Управления, когда в процессе взаимодействия робота с внешним миром определяются тактика и способы производства действий путем логических операций и нахождения необходимой программы; вторая - поддержание физических процессов в образце, являющемся реагентом, перемещение его и обработку, а также очистку и стерилизацию инструментов.
Хотя функциональные блоки системы управления автоматической лаборатории являются относительно сложными, технические методы и средства для создания такой системы в настоящее время уже разработаны [Л. 3].
На рис. 12а представлена блок-схема системы управления такого информационного робота.
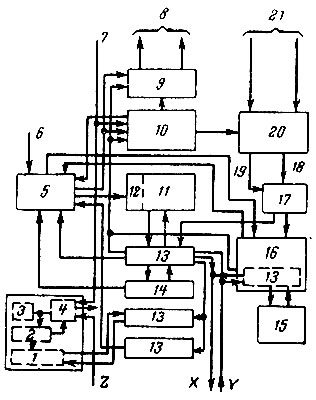
Рис. 12а. Блок-схема системы управления автоматической лабораторией. 1 - регистр воспроизведения времени; 2 - счетчик; 3 - часовой механизм; 4 - синхронизирующее устройство; 5 - управление; 6 - подвод энергии; 7 - случайные сигналы; 8 - команды; 9 - дешифратор команд; 10 - программное устройство; 11 - память; 12 - адрес; 13 - регистр; 14 - блок суммирования и сравнения; 15 - накопитель; 16 - оперативная память и управление накопителем; 17 - аналого-цифровой преобразователь; 18 - непрерывные сигналы; 19 - дискретные сигналы; 20 - умножитель; 21 - вход сигналов от научных приборов и аппарата спуска
Как показал предварительный анализ, соотношение между функциями, выполняемыми по заранее заданной программе, и объемом управления, выполняемым без заранее установленной программы, оказывает сильное влияние на общую логику построения системы.
Для минимизации требований к командным средствам связи лаборатория должна быть в высокой степени самоуправляемой. Изменение последовательности управления и экспериментальных условий должно быть построено так, чтобы была возможность проводить эксперименты, управляя процессом с большого расстояния, основываясь на результатах предыдущих экспериментов.
Например, частота снятия показаний анемометра с нагретой проволокой, применяемого для измерения скорости ветра, может устанавливаться на пункте управления центральным вычислительным устройством в зависимости от степени отличия каждого показания от нескольких предыдущих. Команда же с Земли с целью получения наглядной картины о ветровой обстановке в определенном интервале времени применяется для выделения из двух типов показаний одного: экспериментальных значений скорости ветра или "средней" скорости ветра за несколько минут.
Более сложной является задача создания системы для анализа образцов почвы и горных пород с применением жидких химических реактивов. Надежная работа такого устройства возможна лишь при наличии обширного набора управляющих функциональных блоков, работающих по заранее заданной программе. По степени сложности эти блоки делятся на два типа.
Первый тип - простейший - включает такие функциональные элементы как устройство для перемещения реагентов, содержащее команды определяющие дозировку реактивов, управляющие клапанами и т. д. Такие элементы нет необходимости делать чувствительней к земному управлению в их "подфункции".
Второй тип управляющих элементов - значительно более сложный - выполняет, например, такие операции, как "анализ образца на содержание фосфора". Функциональные звенья этого типа должны либо пропустить, либо прервать управляющий сигнал с Земли в различные моменты работы для передачи информации о своем состоянии, о возможном прекращении или изменении программы работы.
Процесс движения автомата отличается еще большей сложностью, так как включает такие операции, как непрерывное препарирование образцов, очистку инструмента и т. д.
С переходом от физических экспериментов к биологическим сложность устройств постепенно возрастает. Так, например, эксперимент, связанный с определением прочности грунта, содержит некоторые задачи отбора образцов, установки инструмента проведения самого процесса определения прочности. Однако все они могут быть решены относительно просто с помощью электромеханических средств. Переход к химическим средствам измерения (с помощью хромографа, масс-спектрометра, измерение с применением жидких реактивов) связан с существенным усложнением системы. В этом случае проблема весьма осложняется требованием очистки инструмента после каждого его применения и точности дозировки с целью экономного расходования химических реактивов.
Наиболее сложными являются эксперименты, связанные с поисками, обнаружением и описанием жизни, тем более что они должны проводиться неоднократно. Помимо физической очистки инструментов, здесь возникает дополнительная трудность из-за необходимости повторной стерилизации, что особенно важно для приборов, анализирующих микроорганизмы. Некоторые из этих приборов могут дать ложную, дезориентирующую информацию, если часть инструмента, производящего измерение или отбор образцов, будет загрязнена организмами, собранными и препарированными для анализа на ранних этапах.
Несколько упрощенной может быть выполнена система повторного проведения некоторых наиболее интересных биологических экспериментов в отдельных изолированных друг от друга ячейках, каждая из которых является по сути дела миниатюрной, почти независимой биолабораторией. Так как каждая такая ячейка могла бы быть использована только однократно, можно было бы избежать необходимости очистки и стерилизации. Этим гарантировалась бы Достоверность результатов каждого отдельного эксперимента.
Другой вариант космического информационного робота показан на рис. 12б. Он предназначен для использования при топографической разведке и проведения ряда исследовательских работ вблизи места посадки на Луну космического аппарата [Л. 58].
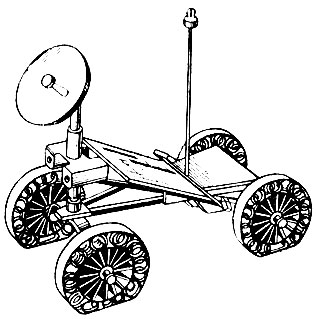
Рис. 12б. Космический информационный аппарат
Это устройство имеет четырехколесное шасси с установленными на нем солнечной батареей, антенной направленного действия, двумя Ревизионными приемниками, обеспечивающими получение пространственного изображения, и другим исследовательским оборудованием. Каждое колесо шасси имеет отдельный электропривод в ступице. Конструкция колес обеспечивает высокую проходимость и заключается в следующем. По периферии колеса укреплен набор гибких колец, которые в свою очередь соединены с гибким ободом, образующим наружную поверхность колеса. Давление на грунт колес составляет 0,035 кГ/см2. Малое давление на грунт и высокая проходимость шасси достигаются путем деформации и охватывания неровностей поверхности упругими наружными кольцами. Рассматриваемый аппарат может преодолевать препятствия высотой несколько большие радиуса колеса и осуществлять подъем с наклоном 35°. База и колея шасси 1,3 и 0,75 м соответственно при диаметре колес 46 см. Общий вес робота 46 кг. Управляется аппарат по командам с Земли или базового космического корабля, данные измерений могут непосредственно направляться на Землю. Ввиду применения в качестве источника энергии солнечных батарей аппарат может действовать в освещенное время лунных суток в течение 9 ч, а затем необходима подзарядка батарей. Потребляемая аппаратом пиковая мощность составляет примерно 35 вт.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'