5. Роботы для подводных работ
При исследовании подводного пространства находит применение специальный класс информационных роботов. Функциями такого автомата являются: восприятие информации (измерение параметров среды, взятие проб, визуальное наблюдение и т. д.), а также физическое воздействие на некоторые объекты и пространственное перемещение. В последнее время возникли задачи подводного картографирования, проведения спасательных операций, подводной сборки, разборки, геологической разведки, добычи полезных ископаемых и т. д. Основные механизмы и подсистемы, входящие в состав робота этого класса, могут быть подразделены на:
системы теленаблюдения (телеконтроля);
исполнительные механизмы манипулятора, включающие приводы и схемы управления ими;
системы пространственного перемещения, включающие механизмы привода, системы ориентации и управляющие схемы;
каналы связи, соединяющие робот с пультом управления;
системы энергоснабжения.
Отрицательным фактором при визуальном наблюдении под водой является то, что видимость сильно ограничивается непрозрачностью среды. В морской воде особенно велико количество взвешенных органических и неорганических частиц, вследствие чего происходит сильное рассеяние света и изображение становится нечетким. Преодоление этих трудностей достигается различными путями. Например, увеличить видимость можно специальным размещением источников света, при котором уменьшается рассеяние взвешенными частицами, а также использованием импульсных источников света, синхронизированных с частотой кадров телевизионной камеры. В последнее время для этих целей также стали находить применение лазерные телевизионные системы, в которых с помощью специальных электрооптических элементов производятся сканирующие перемещения сине-зеленого луча лазера, обладающего большой проникающей способностью в морской воде.
Наиболее сложным для воспроизведения при помощи средств электроники является зрительное восприятие человека, поскольку оно сочетает в себе образное и объемное восприятие. Образное плоское восприятие достигается использованием обычной телевизионной камеры. Методы же пространственной ориентации (параллакс, система счисления или измерения по масштабу, по относительному перемещению и др.) малопригодны для объемного восприятия в сочетании с телевизионной передачей изображения и чрезвычайно усложняют работу оператора. Хорошие результаты получены при помощи простой визуальной системы, использующей две телевизионные камеры, расположенные взаимно перпендикулярно. Для уверенной работы с этой системой достаточно непродолжительной тренировки.
Для дальнего наблюдения оптическая система малопригодна. В ряде случаев находят применение гидролокационные системы. Их разрешающая способность значительно ниже, чем телевизионных, однако они позволяют ориентироваться в обстановке, дают представление о расположении предметов и расстоянии до них.
Помимо гидролокационного и телевизионного оборудования к системам восприятия могут быть отнесены приборы, реагирующие на соприкосновение, гидростатическое давление, системы положения, курса и многие другие.
Но наиболее важной остается все же проблема подводного визуального наблюдения. Исследования в этой области имеют своей Целью выбор оптимальных спектральных характеристик приемников, создание мощных импульсных источников света и поиск наилучших взаимных положений приемников и источников света.
Подводные информационные автоматы могут быть разделены на два типа: плавающие и предназначенные для перемещения по дну.
Одна из схем робота, предназначенного для перемещения по дну моря, изображена на рис. 13. Гусеничный движитель робота RUM обеспечивает перемещение по грунту. В передней части автомата расположена "рука" манипулятора. Визуальное наблюдение, которое ведется по четырем телевизионным камерам, позволяет контролировать процесс манипулирования и перемещение по дну. Полусферический сканирующий гидролокатор служит дополнением к телекамерам и позволяет обнаруживать препятствия и получать представление об окружающем рельефе на значительном расстоянии. Робот снабжен питающим кабелем, обеспечивающим двустороннюю передачу информации [Л. 4].
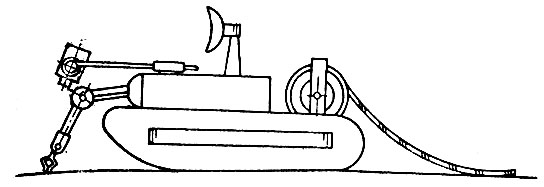
Рис. 13. Схема аппарата для перемещения по дну моря
Вариант подводного плавающего робота (рис. 14) получил название подводного геликоптера. Он имеет более широкие возможности для выполнения работ как на дне, так и при различном погружении независимо от рельефа дна. Однако его недостатком является малая устойчивость. Робот снабжен манипулятором, предназначенным для осуществления сборки и других монтажных работ.
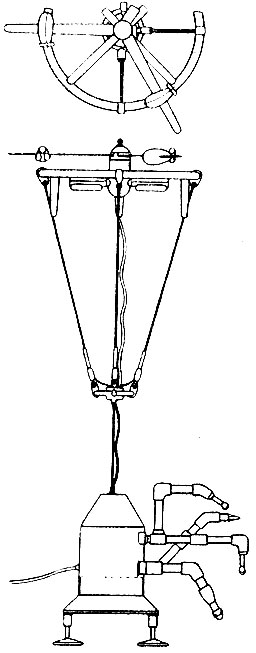
Рис. 14. Плавающий робот для подводных работ
Каналом связи робота с пультом управления может служить кабель, по которому поступает к оператору информация о положении робота, окружающей обстановке и т. д., в обратном направлении следуют команды управления. Кроме того, по этому же кабелю подается энергия для питания систем. При большом расстоянии между роботом и пультом управления возникает задача обеспечения прочности кабеля, предотвращения его закручивания и запутывания, а также уменьшения потерь энергии.
В большинстве случаев снабжение энергией может быть обеспечено одним кабелем канала связи. На больших расстояниях целесообразно использовать автономные источники.
В последние годы в США уделяется большое внимание исследовательским работам, связанным с созданием глубоководных аппаратов для освоения океанских глубин.
Примерно в конце 1964 г. ряд американских фирм приступил к разработке глубоководных аппаратов различного назначения и предложил несколько проектов, часть которых уже реализована. Программой разработки глубоководных аппаратов, получившей название "Поларис", предусматривается создание спасательных поисковых аппаратов для погружения на глубину до 1800 м и поисковых для глубины до 6000 м.
Корпус каждого аппарата имеет четыре прочные сферы; в носовой сфере находятся центральный пост и пульт управления; кормовая предназначается для подводников, в частности для перешедших с затонувшей подводной лодки. Сферы соединяются между собой небольшой проходной сферой с помощью прочных цилиндрических секций. Нижняя сфера, соединенная с проходной, может состыковываться с другими подводными аппаратами. Один гребной винт в поворотной кольцевой насадке и два "туннельных" в носу и корме позволяют аппарату маневрировать в трех плоскостях. Согласно данным американской печати первый такой спасательный аппарат вступит в строй в середине 1968 г. Намечено также построить два аппарата аналогичной конструкции, но с большим числом приборов и с внешними манипуляторами. Аппараты глубоководного поиска имеют больший запас электроэнергии и улучшенные системы связи и навигации.
Результатом 6-летних исследований фирмы "Рейнольде интернейшнл" явилась построенная в 1964 г. специальная подводная лодка "Алюминот". Управление лодкой осуществляется одним человеком с помощью автоматических систем. Лодка снабжена универсальным манипулятором для работы на дне моря и комплектом съемных инструментов, вставляемых в манипулятор.
К классу подводных манипуляционных систем следует отнести телеуправляемый подводный аппарат "Теленот", который предназначается для наблюдения, киносъемки и осуществления простых телеманипуляций [Л. 57].
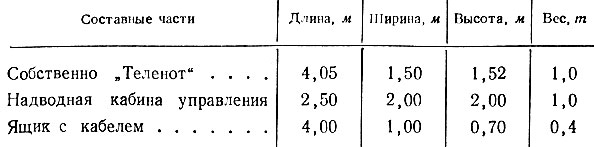
Аппарат состоит из трех основных частей: собственно "Теленота", имеющего на воде благодаря поплавкам нулевой вес; надводной кабины управления и контроля; многожильного электрокабеля, с помощью которого осуществляется постоянная связь между командным пунктом управления и подводной частью "Теленота".
Движение аппарата осуществляется тремя винтами. Два винта, оси которых параллельны продольной оси аппарата, обеспечивают его движение в горизонтальной плоскости; винт с вертикальной осью обеспечивает погружение и подъем аппарата.
Навигационная аппаратура "Теленота" оснащена магнитным компасом с телепередачей курса на поверхность, телеиндикатором давления, фиксирующим глубину погружения аппарата, и ультразвуковым глубиномером, определяющим расстояние от аппарата до дна. Следует отметить, что глубиномер обладает способностью осуществлять работу винта вертикальной тяги аппарата так, что "Теленот" может находиться на постоянном расстоянии от морского дна.
Телеуправляемый манипулятор состоит из опорного рычага, исполнительного органа, захватного устройства и трех домкратов, управление которыми производится с помощью сервомеханизмов. Манипулятор рассчитан на осуществление простых операций (перемещение грузов, захват предметов со дна и т. п.).
В "Теленоте" предусмотрено применение ультразвуковой системы обнаружения предметов, когда объект обнаружения находится за пределами возможности телевизионной системы, а также для точной ориентации аппарата при погружении относительно надводного судна и морского дна.
Последнее обстоятельство позволяет "Теленоту" осуществлять операции большой продолжительности и, с другой стороны, мгновенно передавать информацию со дна моря на поверхность.
Параметры "Теленота" приведены в таблице.
Максимальное давление, выдерживаемое "Теленотом", 100 бар, что соответствует глубине погружения на 1000 м.
Максимальная скорость аппарата в горизонтальной плоскости равна 3 узлам, в вертикальной плоскости - 1,5 узлам.
Технические характеристики телеуправляемого манипулятора следующие:
длина зоны действия 1,1 м; грузоподъемность на 1,1 м - 50 кГ.
Усилие сжатия захватного устройства регулируется в пределах от 5 до 90 кГ.
Необходимо указать на трудности решения проблемы ориентации глубоководных подводных аппаратов в окружающей среде и связи с надводным обеспечивающим судном, так как при погружении аппарата на большую глубину поддержание с ним надежной связи затрудняется, а точность его ориентации в подводной обстановке уменьшается. Определение скорости движения относительно дна океана не всегда возможно, так как большую часть времени аппарат находится на значительном расстоянии от дна. Точная ориентация глубоководных аппаратов особенно важна для научных исследований, поскольку полученные данные должны быть "привязаны" к определенной точке местонахождения аппарата.
В последнее время разрабатываются методы ориентации подводных аппаратов, при которых в районе их действия на дно водоема неподвижно устанавливаются устройства, служащие временными маяками.
Положение маяков на дне определяется с поверхности, и затем подводный робот ориентируется и взаимодействует только с этим маяком во время выполнения комплексов исследовательских или других задач.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'