6. Роботы наземного применения
В наземных условиях в различных областях техники при ряде экспериментальных исследований существуют такие условия, в которых возможно получение информации или проведение какого-либо целенаправленного воздействия только с помощью автономно перемещающихся автоматических систем.
В настоящее время разработан ряд информационных роботов такого типа, перемещающихся на колесном или гусеничном шасси [Л. 5]. Эти машины предназначены для работы в тяжелых условиях больших пожаров, на химических предприятиях, на атомных полигонах при значительном радиоактивном заражении местности и в других подобных ситуациях. Они обладают большой маневренностью, не требуют специальных подъездных путей и коммуникаций, преодолевают существенные препятствия. Снабженные двумя и более "руками" манипуляторов, они позволяют выполнять широкий круг монтажных, подъемно-разгрузочных и других работ. Такие системы могут быть выполнены как с дистанционным управлением, когда оператор расположен на удаленном пункте управления, так и с расположением оператора в герметизированной, защищенной кабине, устанавливаемой непосредственно на шасси рядом с манипуляторами. В последнем случае существенно облегчается визуальный контроль при управлении.
На рис. 15 изображен манипуляционный робот, который конструктивно представляет собой манипулятор, смонтированный на гусеничном шасси 1. Кабина оператора 10 может поворачиваться относительно платформы на колонне 11 на 360°. "Рука" манипулятора установлена над кабиной на поворотном столе 8, на котором манипулятор с помощью двигателя 9 может быть повернут относительно кабины. Манипулятор имеет несколько поворотных и поступательных звеньев (3-7), позволяющих свободно манипулировать деталью 2 при неподвижном шасси. Кабина снабжена защитными стеклами и герметизирована, поэтому машина может быть использована для транспортировки и выполнения монтажных работ в токсичных и радиоактивных зонах.
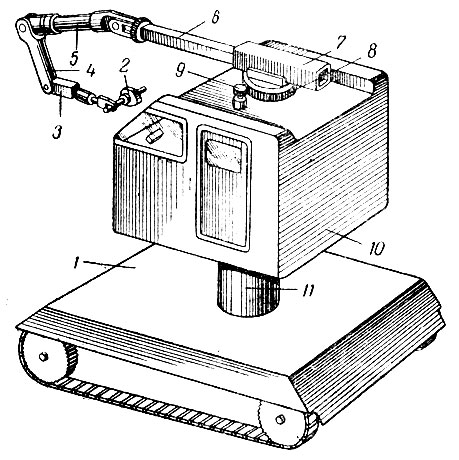
Рис. 15. Манипуляционный аппарат на гусеничном шасси
Один из роботов такого типа разработан в США для обслуживания ядерных реакторов и ракетных установок. Робот установлен на гусеничном шасси и включает в себя кабину, защищающую оператора от радиации и высоких температур, а также две "руки" манипулятора. Вес робота 85 т, а суммарная мощность всех двигателей 660 л. с., длина каждой из исполнительных "рук" в вытянутом состоянии более 5 м. Система окон перископов и телевизионных устройств обеспечивает оператору хороший обзор, защищая его в то же время от опасной радиации и высоких температур. Кабина вместе с манипуляторами относительно гусеничного шасси может подниматься и поворачиваться. Управление манипулятором и шасси осуществляется из кабины. Каждая рука имеет десять степеней свободы (не учитывая движение башни), что придает ей высокую маневренность. Все движения регулируются по скорости и направлению с пульта управления, имеющего около 160 кнопок и рукояток. Конструкция пульта позволяет управлять всеми движениями одновременно.
Системы этого класса, применяемые в закрытых помещениях, обычно оснащаются колесными шасси. Рассмотрим в качестве примеров несколько вариантов таких систем.
На рис. 16 представлено устройство, предназначенное для работы в закрытом помещении [Л. 6]. Для его перемещения оборудованы подвесные рельсовые пути 2, по которым движется тележка манипулятора, состоящего из двух поворотных звеньев, обеспечивающих возможность манипулирования во всех точках помещения. Захватное устройство имеет электропневматический привод. Связь с пунктом управления 1 осуществляется по кабельному каналу. За работой устройства ведется визуальное наблюдение с помощью телевизионной системы.
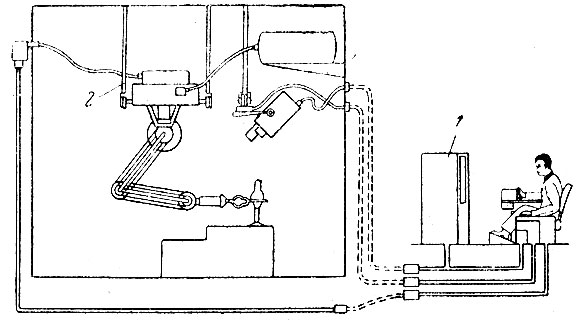
Рис. 16. Подвижный робот для закрытых помещений
Для работы в закрытых помещениях предназначено также устройство [Л. 7], приведенное на рис. 17.
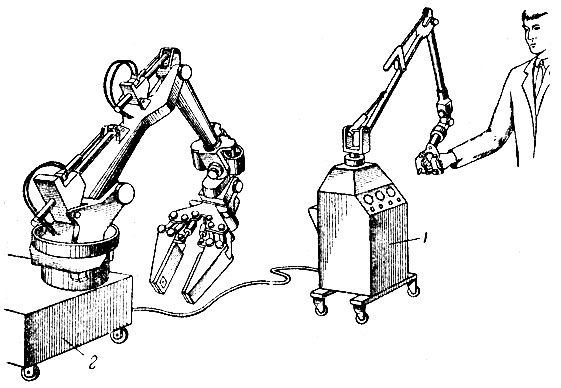
Рис. 17. Манипулирующее устройство для закрытых помещений
Пульт управления 1 и платформа 2 связаны кабелем. Манипулятор может быть установлен на подвижной платформе и перемещаться в нужном направлении командными импульсами от кнопочного пульта. Все повороты управляющей руки воспроизводятся исполнительной рукой с помощью следящей системы, состоящей из датчиков перемещений и углов поворота, задающего устройства и сервоприводов на исполнительной руке.
Фирма "Хьюз эркрафт", занимающаяся много лет разработкой аппаратуры для дистанционного управления, создала робот, который может быть использован как в наземных условиях, так и для космических исследований [Л. 8]. Мобот Мк-II, блок-схема которого представлена на рис. 18, предназначен для использования в ядерных лабораториях. Он снабжен двумя исполнительными "руками" манипулятора, каждая из которых способна совершать самостоятельные движения и имеет шарнирные сочленения: "плечевое", "локтевое" и в "запястьи".
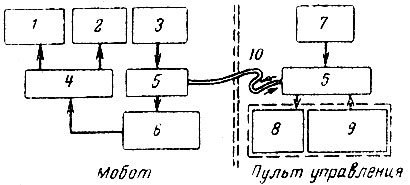
Рис. 18. Блок-схема телеуправляемого аппарата МК-II. 1 - система передвижения машины; 2 - манипуляторы; 3 - телекамеры; 4 - блок управления; 5 - мультиплексер; 6 - вспомогательный источник мощности; 7 - основной двигатель; 8 - экраны телевизоров; 9 - ручки управления движениями мобота; 10 - триаксиальный кабель (линии подачи команд, подвода энергии и получения информации)
"Кисти" манипуляторов состоят из мягких надувных подушечек, давление в которых может контролироваться с высокой точностью оператором, находящимся в соседней, защищенной от воздействия ядерных излучений комнате.
Две телевизионные камеры наводятся на рабочее место, где действует машина, и передают изображение на пульт оператора. Поскольку телевизионные камеры не позволяют получить пространственного изображения, которое необходимо при манипулировании, то стремятся их расположить под углом 90° и рассматривать пространство по двум координатам. Две камеры устанавливаются на подвижных кронштейнах, управляя положением которых, оператор может расположить их в зоне манипулирования наиболее удобным образом. Здесь же находятся микрофоны, позволяющие оператору слышать звуки, производимые машиной при выполнении работы.
Температуру и уровень излучения измеряют термометром и счетчиком Гейгера, показания которых регистрируют приборы на пульте оператора.
Мобот имеет вид стального ящика на колесах с размещенным в нем электронным оборудованием; он снабжен гидравлическим и электромеханическим приводами "руки" манипулятора.
Пульт дистанционного управления имеет ножные педали для регулирования скорости движения машины и манипулятора. В системе применено кнопочное управление работой шарниров аналогов плеч, локтей, запястий и пальцев манипулятора. Аналогично оператор также управляет яркостью, фокусировкой и наведением телевизионных камер. Предполагается снабдить машину программирующим устройством для записи на ленту определенных рабочих команд, с тем чтобы она при повторном выполнении задачи не нуждалась в управлении оператором.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'