Глава третья. Средства перемещения информационных роботов
7. Колесно-гусеничные движители
По сравнению с методами изучения небесных тел и планет с помощью космических аппаратов, пролетающих на близком расстоянии от них, непосредственное изучение физических условий и исследования с помощью автоматических станций, доставленных на поверхность небесного тела или планеты, имеют бесспорное преимущество.
Исследования, осуществляемые с помощью неподвижных автоматических станций, содержат тот недостаток, что позволяют получить необходимые данные лишь о сравнительно небольшом районе в месте посадки. При этом не может быть уверенности в том, что данный участок типичен для всей исследуемой области планеты в целом, и поэтому при его изучении нельзя будет сделать достаточно общих выводов. Район исследования можно существенно расширить при условии создания информационных роботов, обладающих мобильностью, высокой проходимостью и значительной маневренностью. При разработке таких систем возникает ряд сложных технических проблем, связанных с работой этих автоматических аппаратов в условиях, резко отличных от земных (иная атмосфера, иные величины силы тяжести, своеобразный характер грунта и рельефа и др.).
Так как теоретическое решение этих вопросов практически невозможно, уже на стадии разработки и выбора проектных характеристик мобильных агрегатов возникает необходимость в проведении серии экспериментов в условиях, имитирующих условия исследуемой планеты. Такие исследования с точки зрения экономии средств и времени наиболее рационально проводить на моделях подвижных автоматических информационных роботов. Модели этих систем, выполненные с учетом критериев подобия, позволяют использовать с небольшими доработками уже имеющиеся барокамеры и другое необходимое оборудование [Л. 9].
Передвижение мобильного робота и происходящие при этом явления зависят от его размеров, массовой плотности конструкции, свойств материалов, коэффициента трения, ускорения силы тяжести и других параметров.
Самоходные динамически подобные информационным роботам модели позволяют отработать конструкцию ходовой части, определить надежность ее работы на разнообразных грунтах, экспериментально снять технические характеристики и проверить их соответствие заданным. Ходовые испытания моделей роботов позволяют получить и некоторые рекомендации относительно тактики их использования на исследуемой планете.
Такие вопросы, как взаимодействие ходовой части с грунтом, истирание элементов ходовой части, работоспособность ее электропривода и некоторые другие, тщательно исследуются в барокамерах.
Вопрос доставки на Луну автоматических самодвижущихся станций в связи с последними исследованиями поверхности Луны стал практически реальным. Хотя многое пока не ясно, однако уже полученные данные позволили ученым США сделать предположение о возможности использования для этого специально модернизированных наземных транспортных средств. Полученные сведения о грунте позволят производить расчет удельного давления. Однако вопросы контактирования подвижного устройства с грунтом, сцепляемость колесного, гусеничного или другого движителя с поверхностным слоем пока остаются открытыми.
При подходе к вопросу создания шасси для перемещения информационных роботов внеземного и земного назначения инженерами с наибольшим вниманием рассматривались колесные варианты, как проверенные и технически разработанные. Разрабатываются и другие виды движителей, более сложные, но позволяющие избежать тех ограничений, которые связаны с колесными и гусеничными движителями, непригодными для перемещений в условиях сложного рельефа и плохо приспособленными для маневрирования в ограниченном пространстве. В этой связи привлекают внимание кибернетические самодвижущиеся автоматы, перемещение которых осуществляется при помощи механизмов, имитирующих ползание или шагание животных, что позволяет им преодолевать значительные препятствия.
Рассмотрим последовательно разработанные в настоящее время различные типы движителей информационных роботов.
Основные требования, предъявляемые к движителям информационных роботов, можно сформулировать в следующем виде:
возможность движения независимо от коэффициента трения поверхности;
подъем по поверхности с большим углом наклона;
устранение возможности перевертывания;
минимальное удельное давление на поверхность, при котором движение практически не зависит от вида грунта;
приспособляемость к характеру поверхности, благодаря которой устройство может двигаться по ровной, холмистой и скалистой местности, через канавы, ямы и другие естественные препятствия; иными словами, при движении робот не должен требовать специальной подготовки местности;
удобство доставки робота к месту его эксплуатации.
Обычные транспортные устройства не удовлетворяют приведенным выше характеристикам. В этом аспекте решение проблемы следует искать, опираясь на новые технические принципы.
В настоящее время предложен и разработан ряд устройств, в значительной степени удовлетворяющих приведенным требованиям.
Рассматривая колесные варианты передвигающихся устройств, можно отметить, что для выполнения перечисленных требований применяются устройства с одним или двумя колесами значительной величины, имеющими надувные баллоны. Надувные баллоны позволяют уменьшать размеры аппарата при его доставке к месту эксплуатации. Значительные размеры колес позволяют располагать аппаратурные отсеки робота внутри развитой оси. Стабилизация вертикальной оси в аппаратурных отсеках производится с помощью специальных гироскопических устройств.
В качестве примера рассмотрим движитель, предназначенный для доставки на Луну и передвижения по ее поверхности информационной системы (рис. 19, а). Все устройство имеет компактные формы и размещается в последней ступени космического корабля [Л. 10]. Конструкция аппарата представляет полую ось существенных размеров, позволяющую разместить внутри нее защищенные отсеки для исследовательской аппаратуры и персонала, а также ряд устройств, обеспечивающих возможность передвижения системы. На оси устанавливаются два колеса, имеющие большие надувные баллоны, которые при транспортировке находятся в спущенном состоянии. При подлете космического корабля к исследуемой планете в баллоны подается газ, баллоны начинают увеличиваться в объеме, сбрасывают оболочку, защищавшую их во время полета. На концах полой оси находятся два сопла реактивных двигателей, которые обеспечивают мягкую посадку на надутые баллоны. В средней части оси между баллонами находятся люки для выхода экипажа на поверхность планеты, а также большой гироскоп, который удерживает ось в заданном положении.
Рис. 19. Подвижный информационный аппарат для исследования поверхности планет
Для движения устройства по поверхности используется энергия солнечного излучения. С этой целью по обоим концам устройства установлены два вогнутых зеркала, собирающих солнечное излучение на линии фокусов, где расположены радиаторы, содержащие наборы тонких трубок, которые наполнены соответствующим жидким теплоносителем. При расположении устройства на поверхности небесного тела зеркала ориентируются на солнце. На Луне, в условиях отсутствия атмосферы, температура затененных поверхностей весьма низкая. В этих местах также располагаются трубчатые радиаторы, наполненные теплоносителем. Таким образом, возникает существенная разница в температурах радиаторов, расположенных в фокусах вогнутых зеркал, и радиаторов, расположенных на затененных поверхностях. Ввиду того что эти радиаторы соединены между собой трубопроводами, в них возникает интенсивная циркуляция теплоносителя. Установленные в магистралях турбоагрегаты позволяют получать достаточную энергию для привода электродвигателей, вращающих надувные колеса вокруг оси, стабилизированной гироскопом. Эта же энергия служит и для привода ротора гироскопа. Таким образом, рассматриваемое устройство может передвигаться по достаточно ровной поверхности. Путем изменения скоростей вращения колес достигается изменение направления движения.
В устройстве предусматривается регулировка давления газа в баллонах колес, что позволяет выбирать оптимальный режим их эластичности при преодолении незначительных препятствий. При движении по наклонной поверхности возможно уменьшение давления в одном из баллонов с целью сохранения горизонтального положения устройства (рис. 19, б). При преодолении сложных препятствий, например таких, как горные хребты, крутые спуски, подъемы, ущелья, предусматривается использование тех же реактивных двигателей, с помощью которых производится мягкая посадка. Рассматриваемое устройство с включенными реактивными двигателями может перелетать через препятствия, а также выходить на селеноцентрическую орбиту для стыковки с основным космическим кораблем. Для сохранения ориентации вогнутых зеркал к солнцу при выполнении любых необходимых маневров рассматриваемого устройства сопла реактивных двигателей имеют возможность поворачиваться относительно основной оси. Все операции по управлению многочисленными бортовыми системами могут выполняться автоматически, а также вручную из кабины космонавтов.
Многие проекты подвижных станций или информационных роботов для исследования поверхности Луны создавались исходя из предположения о толстом слое пыли на ее поверхности. Но, несмотря на то что данные, полученные с помощью автоматической станции "Луна-9" и других космических систем, опровергают это предположение, разработка конструкций подвижных станций для подобного грунта по-прежнему представляет интерес, поскольку они могут быть также использованы для перемещения по местности со сложным рельефом.
Конструкции подвижных роботов с одной осью обеспечивают передвижение по поверхности с большими уклонами, и, кроме того, в этих устройствах отсутствует опасность перевертывания.
Подобно ранее описанному устройству разработан движитель гусеничного типа [Л. 11]. Гусеничная лента охватывает все устройство и определяет его габариты по длине и высоте. Главными достоинствами, получаемыми при такой компоновке, следует считать низко расположенный центр тяжести и возможность сближения гусеничных лент, в результате чего исчезает такое понятие, как клиренс. Благодаря этому допускается возможность погружения в вязкий грунт на глубину в несколько раз большую, чем допустимая глубина погружения для обычных гусеничных движителей. Переворачивание устройства происходит при углах подъема в несколько раз больших, чем для колесных вариантов движителей этого типа. Компоновка с расположением всех систем устройства внутри движителя позволила выполнить машину в виде катящегося цилиндра на гусеницах (рис. 20, а). Это устройство является одновременно и амфибией. Уровень погружения на рисунке показан пунктирной линией. Доступ в кабину и места для визуального наблюдения и окна 3 находятся в торцах 1 и 2 (рис. 20, б).
Рис. 20. Устройство типа 'амфибия', имеющее гусеничный цилиндрический движитель
Стабильное положение кабины поддерживается путем применения гироскопического устройства и компоновки, при которой центр тяжести всей системы смещен и лежит намного ниже геометрического центра цилиндра. В такой системе существенно упрощаются ходовая часть устройства и трансмиссия. Привод к гусеничным лентам осуществляется шестернями в верхней части корпуса.
На рис. 21 показано гусеничное перемещающееся устройство, которое по принципу действия аналогично предыдущему, но профиль гусениц имеет эллиптическую форму [Л. 12]. Ходовая часть этого агрегата выполнена в виде двух широких, примыкающих друг к другу гусениц, скользящих по гладкой боковой поверхности эллиптического цилиндра. Благодаря тому что гусеницы примыкают почти вплотную и между ними нет впадины, агрегат обладает высокой маневренностью и проходимостью. Электродвигатель и кинематическая цепь передач монтируются на днище агрегата, что приводит к смещению центра тяжести в нижнюю часть, а следовательно, к большей устойчивости.
Рис. 21. Гусеничный движитель высокой проходимости, пригодный для перемещения информационных аппаратов
В ряде случаев предлагается опорную поверхность гусениц выполнять в виде цепи последовательно соединенных упругих сосудов овальной формы. Такое конструктивное решение гусениц механизма перемещения робота позволяет использовать его для передвижения не только по суше, но и по воде.
В движителях информационных роботов возможна и иная конструкция гусениц, представленная на рис. 22, а и б. В этом агрегате каждая из двух гусениц выполняется в виде герметичной гибкой трубы, состоящей из двух наложенных друг на друга лент упругого износостойкого материала [Л. 13]. Пространство между наружной поверхностью внутренней ленты 2 и внутренней поверхностью наружной ленты 4 гусениц в нижней опорной части агрегата заполнено сжатым газом 1. В верхней ходовой части агрегата смежные поверхности лент соприкасаются вплотную, так как уплотнительные ролики 3 препятствуют проникновению сжатого газа в его пространство. Наполненная сжатым воздухом упругая опорная оболочка играет роль воздушной подушки. Она обеспечивает агрегату хорошую проходимость.
Рис. 22. Движитель для информационных аппаратов с надувными гусеницами
Как правило, все колесные варианты движителей выполняются с колесами большого диаметра, что позволяет существенно повысить их проходимость. Так, в США разработан вездеход для геологических исследований в наземных условиях, в котором применяется шасси на четырех колесах диаметром 15 м. В этом вездеходе шины такого диаметра, разработанные фирмой "Гудир", состоят из отдельных секций корда. Монтаж таких колес производится на месте сборки вездехода. Конструкции механизмов перемещения с надувными опорными поверхностями позволяют повысить способность механизма к демпфированию ударных нагрузок.
Конструкции типа колеса являются не единственным вариантом передвижных устройств колесных информационных роботов.
Для передвижения роботов большого веса могут применяться шасси так называемого "пирожкового" типа. Увеличение веса роботов требует увеличения площади контакта колес с поверхностью, что в этих устройствах достигается путем увеличения количества колес. На рис. 23 представлено шасси передвижной лунной лаборатории этого типа, предназначенной для длительного исследования Луны. По проекту, разработанному в США, передвижная лаборатория доставляется на Луну заблаговремено непилотируемым космическим кораблем. Затем вблизи лаборатории совершает посадку лунная кабина с космонавтами, которые с помощью дистанционного управления приближают лабораторию к лунной кабине и переходят в нее. Механизм перемещения лунного информационного аппарата выполняется в виде шестиколесного шасси с балансированной подвеской, допускающей не только поперечные, но и продольные перекосы шасси. Привод каждого колеса производится отдельным двигателем постоянного тока. Питание двигателей производится от водородно-кислородных топливных элементов.
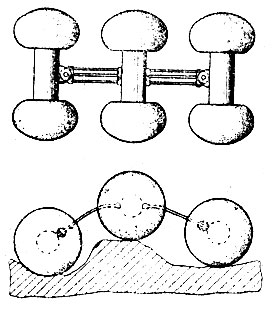
Рис. 23. Шасси подвижной лунной лаборатории
Рассмотренная система придает движителю высокую проходимость и маневренность. Она имеет три независимые оси и шесть колес. Ее можно складывать для транспортировки на космическом корабле. Все оборудование системы размещается в полых осях, причем достигается требование, чтобы центр тяжести лежал ниже центра колес. В этом случае увеличивается угол опрокидывания. Каждая из трех полых осей образует отдельную секцию с независимой подвеской. Оси секций могут быть повернуты относительно друг друга; угол между ними изменяется в интервале ±105°. Такая структура позволяет шасси как бы огибать препятствия. Устройство может преодолевать рвы, овраги и ямы ограниченных размеров.
С целью максимального уменьшения весовых и габаритных характеристик лунного транспортера фирмой "Учиттан" (США) была предложена оригинальная конструкция колес и механизма перемещения. Опорная поверхность колеса выполняется в виде широкой металлической ленты, а спицы, также выполненные в виде полос, имеют форму эвольвент. Такое конструктивное решение дало большой выигрыш в весе, так как позволило соединить колесо с рессорой в единый элемент и привело к повышению проходимости и срока службы колеса за счет большой способности к деформациям. Конструкция колеса обеспечивает отсутствие остаточных деформаций при ударных нагрузках. Фирмой "Учиттан" на таких колесах разработан лунный транспортер, который составляется из нескольких двухколесных тележек, количество которых определяется программой исследования [Л. 14]. После прилунения транспортер автоматически раскрывается в цепь связанных между собой двухколесных тележек. Все колеса являются ведущими и имеют самостоятельный привод.
Движитель рассчитан на эксплуатацию в лунных условиях в течение 14 дней с размещением на нем экипажа космонавтов в количестве 2 чел. В головной тележке находится пульт управления всем агрегатом и его системами, приборами и вспомогательным оборудованием. С целью защиты от микрометеоритов и радиации командная тележка несет на себе специальное покрытие. Вторая и третья тележки служат для размещения исследовательской аппаратуры, контрольно-измерительных приборов и вспомогательного оборудования. Тележки связаны между собой специальной муфтой сцепления, позволяющей осуществить как гибкое, так и жесткое соединение, что существенно повышает проходимость транспортера по поверхности, покрытой трещинами.
Подобно приведенному выше колесному поезду, в котором число пар колес может изменяться в зависимости от задач, выполняемых информационным роботом, а следовательно, и в зависимости от его весовых характеристик, разрабатываются шасси в гусеничном исполнении (рис. 24). В этом устройстве цепь гусеницы как бы охватывает кругом все устройство, что делает его чрезвычайно устойчивым благодаря низко расположенному центру тяжести. Устройство состоит из двух или больше шарнирно соединенных секций.
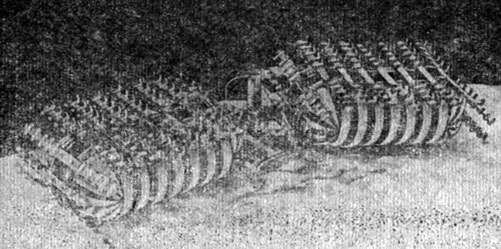
Рис. 24. Двухсекционное устройство перемещения информационного робота с 'охватывающим' гусеничным движителем
Как видно из приведенных выше конструкций, увеличение площади контакта в колесных и гусеничных устройствах достигается увеличением диаметра колес и их ширины. Оси колес обычно параллельны поверхности перемещения. Эти движители наиболее многочисленны.
Оригинальными решениями увеличения контакта и проходимости являются движители со сферическими и коническими колесами [Л. 15]. Их оси наклонены к поверхности перемещения, как показано на рис. 25, а, Это позволяет увеличить площадь контакта и величину условного диаметра колеса. Конструкции таких колес весьма разнообразны. Так, конические колеса на рис. 25, б имеют удачную конструкцию. Две несимметричные шины разделены жестким конусом с ребрами для перемещения по мягкому и сыпучему грунту.
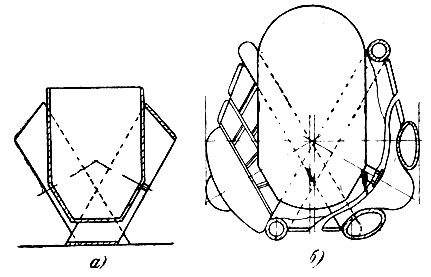
Рис. 25. Конические колеса движителей
Аналогичны по принципу сферические колеса с наклонными навстречу осями [Л. 16]. Они обеспечивают более высокую проходимость по сравнению с колесами обычного типа. На рис. 26, а изображена самодвижущаяся система на сферических колесах. На жесткой сфере колеса нанесены слои резины. Протекторные дорожки расположены на сфере кругами и по меридианам, концентрируясь у ступицы колеса. Погружение колеса в грунт приводит к значительному росту сцепления. Конструкция привода такого колеса несложна (рис. 26, в). Вращение колеса осуществляется через вал 3 и ступицу. Трансмиссия состоит из конической пары и цепной передачи 4. Третье рулевое колесо (рис. 26, б) состоит из двух сближенных полусферических колес, установленных на цапфах 2 вала 1 рулевой колонки. Самоходные системы такого типа могут преодолевать мягкие грунты при погружении колес не более чем на 15 см. Для рельефа с резкими переходами (нагромождение камней, расселины) они малопригодны.
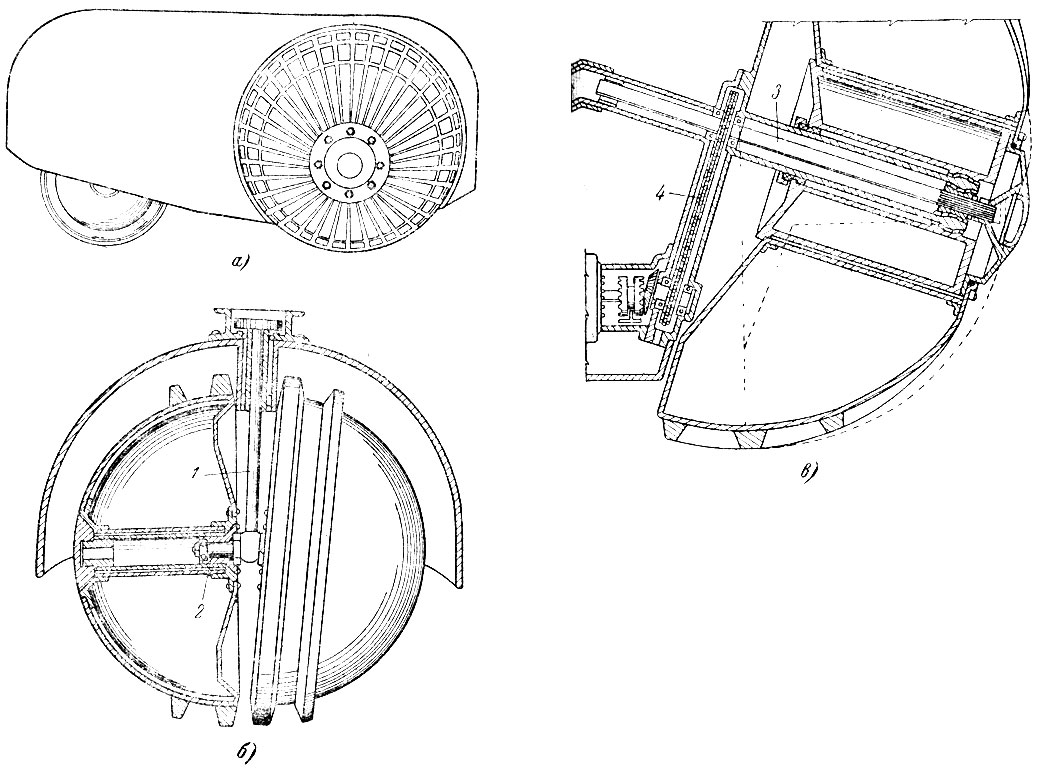
Рис. 26. Самодвижущаяся система на сферических колесах
Устройство типа "тандем" на двух последовательно расположенных сферических колесах большого диаметра представлено на рис. 27. Отличаясь своеобразием компоновки, устройство сохраняет преимущества колес с наклонными осями [Л. 17]. Несмотря на наличие только двух колес, устойчивость в боковом направлении обеспечивается двумя шинами разного диаметра 2 и выступающими частями корпуса 1. Корпус имеет сложную конфигурацию и образует кабину из двух отсеков. В кабине переднего колеса имеется место для водителя и пульт системы управления движением тележки. Второй отсек, расположенный по другую сторону от оси устройства, устанавливается на оси заднего колеса и является моторным. В нем имеется место для второго члена экипажа.
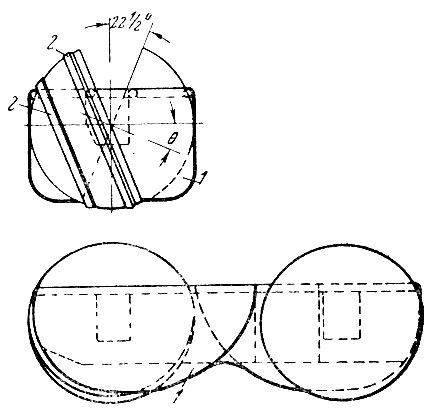
Рис. 27. Шасси типа 'тандем' на двух сферических колесах
Максимально уменьшая высоту центра тяжести, что возможно благодаря тандемной конструкции и отсутствию клиренса, можно гарантировать устойчивость устройства при углах наклона поперечной оси почти в 45°. Рулевые механизмы устройства являются наиболее сложными, поскольку управление одним несимметрично расположенным сферическим колесом с наклоненной осью представляется весьма трудной задачей.
Оценивая вопросы, связанные с ходовыми достоинствами рассматриваемого устройства, следует отметить, что среди известных подвижных устройств на конических и сферических колесах конструкцию последнего можно считать одной из наиболее удачных.
Представляет интерес возможность применения этого передвижного устройства во внеземных условиях. Его транспортировка, по сравнению с транспортировкой разрабатываемых многосекционных устройств, которые должны определенным образом складываться, осуществима без разъема на блоки.
Маневренность подвижного информационного робота, способность быстро изменять направления движения и тем самым воспроизводить различные траектории сканирования исследуемой поверхности является одной из важнейших характеристик рассматриваемых систем.
Представленная на рис. 28, а мобильная платформа сочетает в себе преимущества колесных устройств с наклонной осью и высокую маневренность подвижного автомата [Л. 18]. Каждое из четырех колес, опорная поверхность которых выполняется сферической, снабжается индивидуальным электроприводом. Помимо вращения вокруг своей продольной оси, которое осуществляется электродвигателем, колесо обладает еще одной степенью свободы - поворотом продольной оси колеса в плоскости чертежа на угол а, изменяющимся в пределах от нуля до 90°. Механизм поворота включает электродвигатель, выступающая часть ротора которого выполнена в виде червяка, находящегося в зацеплении с овальным зубчатым
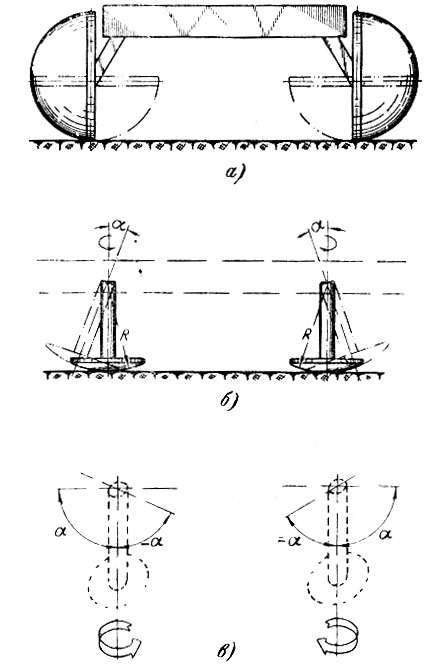
Рис. 28. Шасси со сферическими колесами на осях с регулируемым углом наклона
Очевидно, что если значение а будет равно нулю, агрегат передвигаться не будет, а при α = 90° информационный робот будет иметь максимальную скорость движения. Это следствие изменения окружной скорости вращения колеса (при повороте продольной оси в плоскости чертежа).
Основной особенностью агрегата, представленного на рис. 28, б, является то, что в нем изменение направления на противоположное может производиться не реверсом электродвигателей, а поворотом продольной оси вращения колеса в противоположную сторону. Например, если агрегат двигался вперед и угол при этом составлял 45°, то обратное движение агрегата будет иметь место при повороте оси вращения в обратную сторону на 90°, т. е. при α = -45° (рис. 28, в).
Мобильность агрегата может быть существенно повышена, если кронштейн выполнить поворотным, оснастив агрегат дополнительным электродвигателем и червячной парой, поворачивающей кронштейн в плоскости, перпендикулярной плоскости чертежа. При этом агрегат помимо возможности передвижения вперед - назад получит возможность перемещаться и в направлении, перпендикулярном основному направлению движения, т. е. вправо - влево. Повышение маневренности агрегата позволит с успехом применить его для оперативного исследования участка поверхности, обладающего значительной информативной емкостью, путем выбора надлежащей траектории сканирования.
Например, если скорость движения колес правой пары будет превышать скорость колес левой пары, то движение агрегата будет происходить по спирали, параметры которой могут варьироваться в значительных пределах изменением отношения угловых скоростей вращения колес обеих пар, а также углом наклона их осей.
Таким образом, не изменяя направления вращения колес, но варьируя отношение их угловых скоростей, а также наклоны колес (в плоскости чертежа или в плоскости, перпендикулярной плоскости чертежа), можно получить ряд траекторий движения агрегата, из которого можно сделать выбор оптимальной траектории сканирована исследуемого участка поверхности.
К устройству рассмотренного типа может быть отнесен и механизм перемещения, представленный на рис. 29, который является гусеничным вариантом рассмотренного выше движителя [Л. 19]. Подвижная часть устройства выполнена в виде четырех треугольных гусениц, каждая из которых снабжается самостоятельным электродвигателем и редуктором. Характерной особенностью данного движителя является то, что каждая гусеница снабжена гидравлическим устройством, посредством которого производится ее поворот вокруг оси, благодаря чему осуществляется смена ходовой части гусеницы.
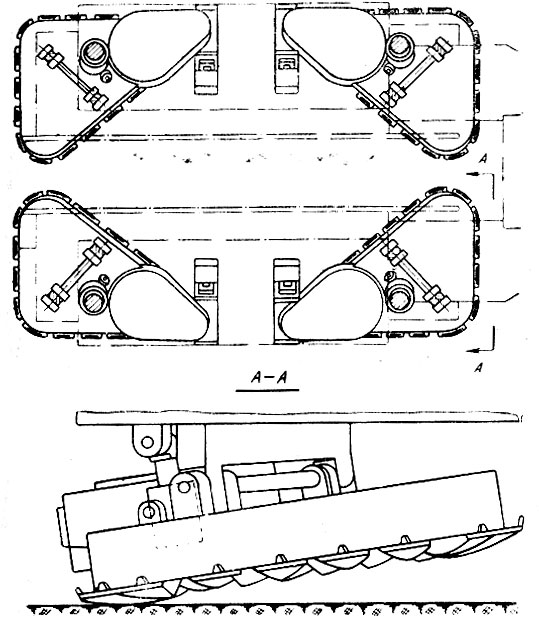
Рис. 29. Движитель с поворотными гусеничными лентами
Например, если агрегат передвигается вперед или назад с помощью наружных боковых сторон треугольной гусеницы (как это показано на рис. 29), то при повороте гусениц вокруг оси и соответствующем реверсе двигателей агрегат будет передвигаться влево или вправо при помощи торцевых сторон гусениц.
Подводя итог рассмотрению колесных вариантов средств перемещения информационных роботов, следует отметить, что они в настоящее время признаются наиболее перспективными. Планируемые в США полеты к Луне в 1970-1980 гг. по программам LESA, ALSS, ААР (Lunar Exploration System for Apollo, Apoll Logistics Sunport System, Apollo Application Program) оснащаются колесными транспортными средствами перемещения но лунной поверхности для перевозки космонавтов, грузов, проведения исследовательских и спасательных работ.
Один из таких роботов, показанный на рис. 12б, имеет четырехколесное шасси, причем внешний обод выполняется из гибкого материала и крепится к колесу через расположенные по его периметру гибкие кольца малого диаметра. Такая конструкция шасси позволяет колесам иметь большой контакт с поверхностью и огибать ободом неровности ограниченных размеров.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'