8. Шагающие информационные роботы
Существенно отличную группу образуют механизмы, пространственное перемещение которых имитирует принципы передвижения живых организмов. Некоторые варианты кибернетических автоматов построены по образцу шагающих биологических систем.
Перемещение массы на расстояние Δх является типичным для кибернетических самодвижущихся автоматов (рис. 30). В то время как передвижение колесных транспортных средств происходит всегда таким образом, что точка 0 движется по прямой линии, при перемещении шагающих устройств траектория 00' представляет собой дуги различной кривизны, причем выбор наиболее рациональной дуги представляет собой вопрос, относящийся к проблеме оптимального управления.
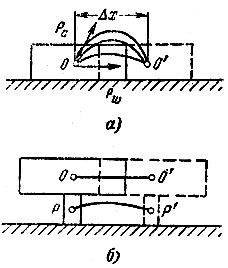
Рис. 30. Двигательные элементы структур кибернетических автоматов
В зависимости от критерия оптимальности и динамических ограничений при перемещении массы, по-видимому, существует только одна траектория, по которой наиболее целесообразно осуществляется движение кибернетического автомата. Траектория движения кибернетического автомата может изменяться в зависимости от рельефа, по которому он движется.
Необходимо отметить, что у кибернетических самодвижущихся автоматов движущая сила должна всегда действовать под некоторым углом по отношению к линии поверхности, поэтому автомат, движущийся по ровной поверхности, имеет меньший к. п. д. по сравнению с к. п. д. колесного транспорта.
Движение информационного робота этого типа носит прерывистый пульсирующий характер. Показанная на рис. 30, а сила Рс у кибернетических автоматов действует всегда под углом α к поверхности, в то время как у колесных транспортов сила действует постоянно и параллельно поверхности.
Периодическое отделение массы от поверхности земли приводит к потере энергии, поскольку транспортному средству необходимо сообщать ускорение также и в направлении, перпендикулярном траектории. Поэтому большое значение приобретает вопрос о снижении потерь энергии на вертикальное перемещение и получение значительно более высокого к. п. д. при сохранении основных преимуществ бесколесного движения. Совершенствование суставного двигательного механизма сочленения необходимо также для улучшения характеристик движения.
Структура другого вида двигательного элемента такова, что основная часть массы движется по прямолинейной траектории и лишь меньшая ее часть неизменно соприкасается с поверхностью и отделяется от нее. При этом имеет место элемент движения по двум траекториям и поэтому потери в результате действия поперечного ускорения снижаются (рис. 30, б). Вместе с тем происходит усложнение конструкции двигательного элемента, который по аналогии с живой биологической системой будем называть ногой.
Разработанные в настоящее время шагающие роботы имеют одни и те же недостатки: сложность механизма, малую скорость перемещения вследствие неудовлетворительных динамических характеристик и недостаточную маневренность.
Наиболее распространенная кинематическая схема устройств шагания использует гидроприводы либо кривошипно-шатунные механизмы.
Поскольку в последнее время довольно интенсивно ведутся работы по созданию машин-вездеходов, основанных на подобных принципах, можно ожидать, что сравнительно скоро будут созданы вполне приемлемые для эксплуатации шагающие механизмы.
Разрабатываются конструкции шагающих устройств, которые обеспечивают передвижение платформы по твердой поверхности, имеющей существенные неровности. В таких устройствах, как правило, имеются три опорные стойки, обеспечивающие надежный контакт с поверхностью (рис. 31, а). Передвижение платформы по прямой на один шаг происходит за три такта, показанных на рис. 31, б, после чего ноги возвращаются по отношению к платформе в прежнее положение [Л. 20].
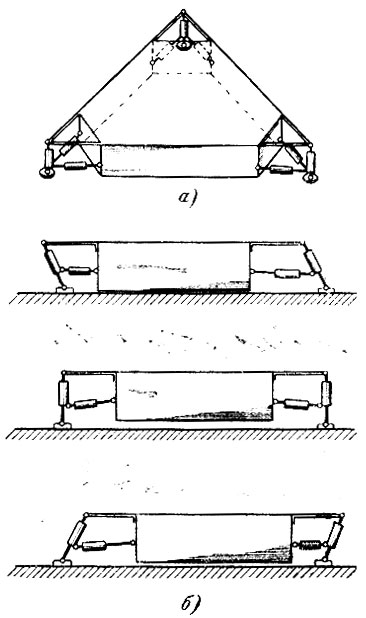
Рис. 31. Шагающее устройство с тремя подвижными стойками
Как видно из приведенного рисунка, силовое воздействие на передвигаемую платформу осуществляется стойками, изменяющими свою длину с помощью гидравлических устройств. Движение платформы происходит периодически, причем во время выноса стоек в первоначальное положение она неподвижно стоит на поверхности. При движении платформы по траектории, отличной от прямой линии, в шагающих устройствах обычно предусматриваются механизмы, изменяющие положение стоек относительно траектории движения, что достигается также силовыми гидравлическими приводами. Разработана платформа, аналогичная рассмотренному устройству, в которой каждая из трех стоек имеет лишь две опоры с отдельным гидроприводом (рис. 32). Путем взаимного координирования величины удлинения опор шагающих стоек достигается возможность изменять направление движения платформы. Рассмотренные устройства предполагают остановку во время каждого цикла шага платформы, когда она устанавливается на грунт. В это время ноги переносятся вперед и подготавливается к следующему шагу [Л. 21].
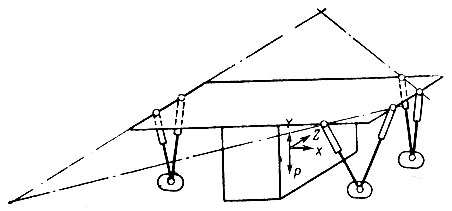
Рис. 32. Шагающее устройство с гидравлическим приводом стоек, парой цилиндров
Помимо дискретного поступательного движения платформа имеет колебания в вертикальном направлении.
Известны также конструкции устройств подобного типа, где при увеличении количества ног вдвое подготовка следующего шага одной группы стоек происходит во время цикла передвижения платформы на другой группе стоек. Такие устройства более сложны, особенно в части координирования автоматического передвижения ног, но обеспечивают более плавное передвижение с меньшими вертикальными колебаниями платформы.
На рис. 33, а показано шагающее устройство, имеющее восемь стоек, каждая из которых управляется двумя гидроцилиндрами. Один из цилиндров жестко установлен в корпусе платформы и приводит в движение стойку в направлении движения платформы (рис. 33, б), а другой находится на оси стойки и изменяет ее длину, движение платформы на один шаг осуществляется следующим образом. Гидроцилиндром 2 стойка 1 доводится до касания опоры 4 с поверхностью, а затем гидроцилиндром 3 передвигается на величину шага. Аналогичные синхронные движения совершаются четырьмя стойками, образующими группу опор, обеспечивающих устойчивость платформы. Во время проведения шага одной группой стоек другая группа возвращается в исходное положение. Движение этого устройства не имеет колебаний по вертикальной оси, хотя скорость движения имеет переменную составляющую. Для изменения направления движения этого устройства предусмотрены две пары стоек, по одной паре на каждую группу из четырех ног, которые установлены совместно с гидроприводами на платформах, имеющих возможность поворота по отношению к продольной оси всей машины пространственного перемещения [Л. 22].
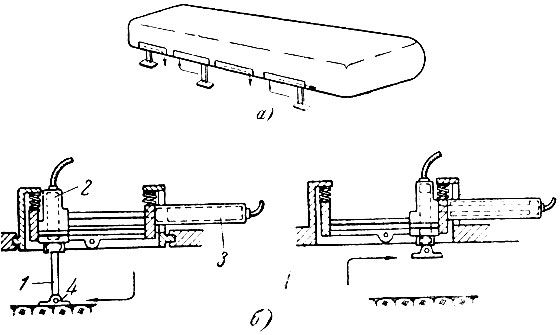
Рис. 33. Шагающее устройство на восьми подвижных стойках
В рассмотренных конструкциях шагающих устройств применяются возвратно-поступательные движения опор, для которых наиболее удобным является гидропривод.
Представленное на рис. 34 устройство относится к классу шагающих самодвижущихся агрегатов. Эта модель, разработанная конструкторами фирмы "Дженерал моторс", предназначена для исследовательской экспедиции в условиях лунного рельефа. В процессе исследований опытного образца было установлено, что агрегат, управляемый электронным устройством, надежно передвигался ("шагал") по пересеченной местности. При этом он с успехом преодолевал Подъемы с углом наклона до 45°, там где имело место буксование не только колесных, но и гусеничных машин.

Рис. 34. Шагающий самодвижущийся аппарат
Рассмотренный агрегат в классе систем, предназначенных для оперативного поиска, сбора и обработки информации, заслуживает особого внимания, так как, несмотря на небольшую грузоподъемность и скорость передвижения (около 8 км/ч), он обладает хорошей маневренностью и, что особенно важно, высокой проходимостью.
Разрабатываются системы, занимающие промежуточное положение между колесными и шагающими движителями информационных роботов. Эти устройства должны сочетать положительные качества как колесных, так и шагающих систем.
Вариант информационного робота, изображенный на рис. 35, являясь колесным перемещающимся устройством, имеет пару "клешней", которые служат в качестве вспомогательного средства для перемещения через препятствия путем захвата клешнями за неровности поверхности.
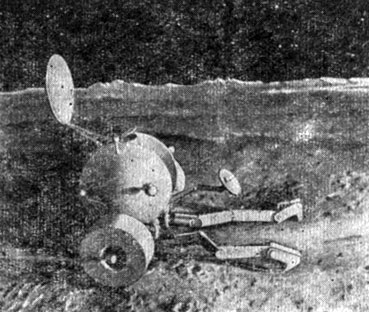
Рис. 35. Информационный робот на колесном шасси с парой 'клешней'
Для передвижения по неровной и рыхлой поверхности разрабатываются вспомогательные устройства, которые помогают движению колесной системы. Движение платформы в этом случае осуществляется за счет подвижных стоек, которые имеют большую поверхность опоры. На рис. 36 показано устройство этого типа, в котором две стойки установлены между колесами. Опоры стоек шарнирно крепятся к двум штокам гидроцилиндров. Шестеренчатый насос создает давление в гидросистеме, а специальное распределительное устройство переключает подачу гидросмеси в цилиндры "ног". Как видно из рисунка, гидросистема обеспечивает толкательное движение одной стойки, в то время как другая стойка возвращается в исходное положение для производства следующего толкательного движения. Гидроцилиндры шарнирно крепятся к подвижной платформе и во время рабочего цикла несколько поворачиваются вокруг своих осей, что вызывает необходимость подвода к ним гидросмеси гибкими трубопроводами. Рассмотренная система обладает повышенной проходимостью и в сочетании с колесами, имеющими малое удельное давление на грунт, переменное и регулируемое внутреннее давление, а также значительные размеры, может преодолевать различные преграды с рыхлым внешним слоем [Л. 23].
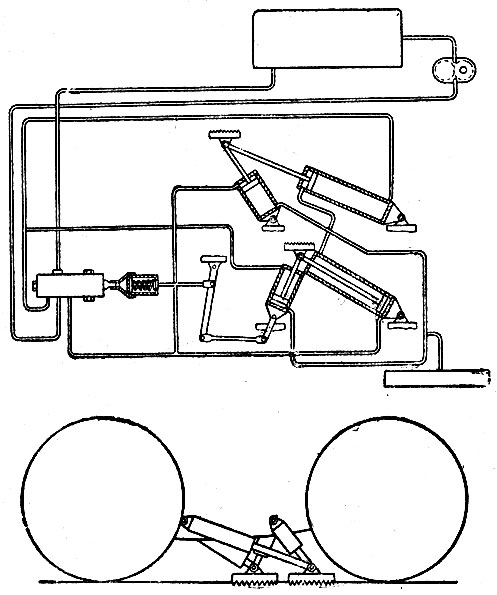
Рис. 36. Движитель на колесном шасси, снабженный дополнительно парой шагающих стоек
К шагающим устройствам можно отнести информационные роботы, перемещающиеся по поверхности движениями, подобными прыжкам (рис. 37, а). Такой способ позволяет передвигаться по местности, имеющей препятствия, которые не могут быть преодолены обычными средствами (стены, трещины и т. д.). Кроме того, это устройство сравнительно просто и быстро может менять первоначальное направление движения. Основным недостатком таких устройств является наличие при передвижении больших ускорений, что накладывает определенные требования на бортовые механизмы и аппаратуру. Очевидно, что для устройств этого класса основной трудностью является обеспечение устойчивости во время прыжка и особенно во время приземления. В рассматриваемой конструкции механизм стабилизации положения прыгающей платформы включает в себя две пары гироскопов с взаимно перпендикулярно расположенными осями вращения в горизонтальной плоскости. Гироскопы каждой пары имеют противоположные направления вращения, что исключает влияние трения в подшипниках гироскопов на стабилизацию всего устройства [Л. 24]. Принцип действия устройства заключается в следующем. Вся передвигающаяся платформа располагается на поверхности, на опоре, которая изменяет свою длину с помощью телескопических соединений. Верхняя часть опоры крепится на платформе шаровым шарниром. По отношению к направлению вертикальной оси платформы специальный гидропривод изменяет направление оси опоры. Механизм подбрасывания платформы аналогичен устройству цилиндра в двигателях внутреннего сгорания. Нижняя часть опоры является поршнем, а верхняя, укрепленная на платформе в шаровом шарнире, - цилиндром. Направление прыжка задается смещением оси опоры по отношению к вертикальной оси платформы. Ввиду того что центр тяжести платформы совпадает с шаровым шарниром, направление опоры определяет направление движения платформы при взрыве горючей смеси в цилиндре опоры. Во время прыжка, как показано на рис. 37а, опора занимает положение, обеспечивающее компрессию горючей смеси в цилиндре, когда опора касается твердой поверхности. Затем происходит зажигание горючей смеси и производится следующий прыжок.
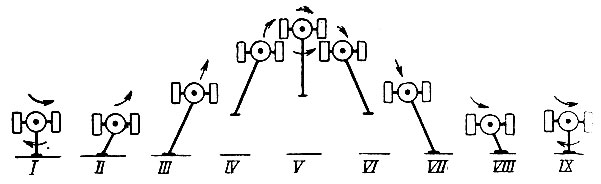
Рис. 37а. Устройство для перемещения прыжками
В настоящее время для привода подобных систем разрабатываемых для космического применения, используется энергия сжатого газа.
Для рационального выбора средств перемещения информационных роботов обычно оценивают систему грунт - экипаж, для чего необходимо располагать по меньшей мере значениями следующих параметров грунта [Л. 52]:
1) параметры прочности грунта: С - сцепление, φ - трение;
2) параметры деформации грунта: Кφ - коэффициент пропорциональности деформации по трению, Кс - коэффициент пропорциональности деформации по сцеплению, n - показатель погружения, К - коэффициент пробуксовки.
Сопротивление движению шагающей машины для одной ноги
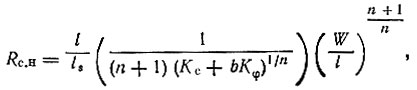
где ls - длина шага, l - длина ступни, b - ширина нагружаемой площади опоры, W - нагрузка (вес подвижного робота).
Приведенное уравнение определяет уменьшение сопротивления как пропорциональное отношение длины l ступни к длине ls шага. Отсюда, сделав это отношение достаточно малым, теоретически можно уменьшить Rc до любой желаемой величины.
Подобное уравнение для жесткого колеса записывается так:
где D - диаметр колеса.
Решая вопрос выбора колесного или шагающего движителя робота, примем для сравнения колесо и двуногое шагающее устройство. Для сравнения величин сопротивления движению этих двух механизмов можно построить график отношения величин Rс.н и Rc.к как функции нагрузки W для различных значений грунтового параметра Кφ. Это отношение можно получить из приведенных выше уравнений. При n = 1 и Kс = 0 (для сухого песка) это деление дает:

Принимая далее, что согласно принятым соотношениям ls = 0,7D, l = 0,3D и bk = 0,2D, получаем уравнение в более простой форме
Функция Rс.н/Rс.к = f(W), изображенная графически в логарифмическом масштабе по обеим осям для различных значений Kφ, дает ряд параллельных прямых (рис. 37б), наклоненных под углом, тангенс которого равен 2/3. Приведенный график построен для D = 500 мм, n = 1.
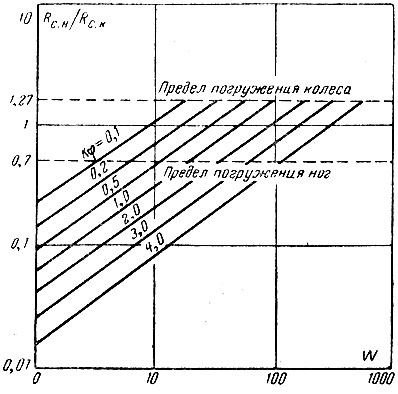
Рис. 37б. График функции нагрузки
Погружение вследствие нагрузки не может увеличиваться бесконечно. Примем, что максимальный предел нагрузки определяется погружением z = 0,3D, что является довольно осторожным допущением.
Тогда из приведенных уравнений соответственно для ног и колеса, принимая опять Kс = 0, n = 1, мы получим, что предельные значения W, вычисленные для различных значений Kφ, ограничивают работу шагающего механизма отношением Rс.н/Rс.к = 0,7; работа колеса ограничивается более высокой нагрузкой, соответствующей отношению Rс.н/Rс.к = 1,27.
Тот факт, что нога увязнет в грунте при нагрузке меньшей, чем та, при которой потеряет подвижность колесо, можно объяснить тем, что принятая прямоугольная площадь опоры ноги постоянная и не меняется по мере погружения, в то время как опорная поверхность колеса увеличивается по мере увеличения погружения до z = D/2 и поэтому может выдерживать более высокие нагрузки. Таким образом, с точки зрения допустимого предела погружения колесо можно нагрузить больше, чем пару ног шагающего механизма. Рисунок 37б показывает, что чем меньше нагрузка, тем меньше величина отношения Rс.н/Rс.к, т. е. тем больше преимущества шагающего движителя перед колесным. При более высоких нагрузках, которые могут быть приемлемы для шагающей машины и допустимы для колесного экипажа, ходьба вызывает большее сопротивление, чем качение.
Суммируя, можно констатировать, что преимущество шагающего механизма по сравнению с колесным движителем не подавляющее, по крайней мере с точки зрения малого сопротивления движению, а скорость передвижения такого устройства очень высока. Если принять во внимание проблемы обеспечения устойчивости ног на неровной поверхности, преодоления препятствий и необходимость "ощущать" геометрию поверхности, чтобы избежать аварийных положений, в которые нога может легче попасть, чем колесо, шагающий механизм становится еще менее привлекательным.
Следующим этапом в выборе движителя информационного робота является ответ на вопрос, что лучше - гусеница или колесо. В настоящее время этой теме посвящен ряд исследований, которые показали, что как колеса, так и гусеницы имеют свои достоинства и недостатки. Для подвижных информационных роботов, вес которых имеет существенное значение в связи с трудностями доставки, колесное шасси более перспективно.
В этой связи представляют интерес колеса с гибким ободом и эллиптическими спицами, рассмотренные в § 4.
Эти колеса обеспечивают удлиненное пятно контакта, в 2,5-3 раза больше, чем жесткого колеса. Пятно контакта увеличивается пропорционально вертикальной нагрузке и направленному вперед крутящему моменту. Можно считать, что такие колеса по своим показателям находятся очень близко к гусенице, не теряя достоинств колесного движителя. Кроме того, упругость колес оказывает положительное влияние на динамику экипажа, уменьшая колебания кузова и снижая ударные нагрузки.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'