Глава четвертая. Манипуляционные системы
9. Процесс манипулирования
Одной из наиболее высоко развитых способностей человека является возможность осуществлять ряд весьма разнообразных действий непосредственно рукой. Процесс выполнения рукой той или иной операции слагается из следующих этапов. Путем зрительного восприятия информации человек-оператор оценивает ситуацию, мысленно планирует осуществление необходимых манипуляций, протягивает руку, берет объект и, прикладывая силу, перемещает его в нужном направлении. За кажущейся простотой гладко и быстро протекающей работы скрыт сложный процесс динамики манипулирования. Мозг посылает командные импульсы, вызывающие ответное раздражение мышц. В свою очередь мозг постоянно получает информацию от четырех основных типов восприятий (зрительной, двигательной, осязательной и слуховой), благодаря которым он получает примерные сведения о положении руки, скорости движения, прилагаемом усилии и т. д.
С точки зрения механики рука человека может быть представлена в виде пространственного многозвенного шарнирного механизма, приводимого в движение различного рода тягами (мышцами), управляемыми импульсами задающего устройства (мозга).
Мышцы одновременно играют роль обратных связей, так как информация о скорости и направлении движения, приложенном усилии, характеристике объекта, вырабатываемая мышцами руки и ее тактильными элементами, непрерывно поступает в мозг.
Необходимо отметить другую важную особенность руки человека, которая состоит в том, что все ее движения являются двусторонними: они могут быть обусловлены действием своих собственных источников двигательной силы (мышц) или могут изменить направление под действием внешней механической силы.
При проектировании манипулятора целесообразно использовать эти свойства человеческой руки с тем, чтобы оператор мог управлять манипулятором с большой точностью, надежностью и быстротой. Часто оказывается весьма желательным, чтобы оператор, сразу контролируя все основные возможные движения, в то же время уделял основное внимание целям или результатам производимой операции, а не органам управления манипулятора. Прежде чем установить основные требования, предъявляемые к конструкциям дистанционно управляемых механизмов, и дать определение манипуляторам, рассмотрим наиболее общие задачи манипулирования.
Осуществление требуемой операции с помощью дистанционно управляемых механизмов может быть достигнуто либо разработкой механизма специального назначения, способного производить только одну конкретную операцию, либо использованием одного из манипуляторов общего назначения, позволяющего осуществлять целый ряд операций, которые мог бы выполнить человек.
Применение специализированных механизмов рационально и экономически оправдано лишь в том случае, если поставленная задача, во-первых, требует быстроты решения и ставит перед оператором большие трудности с точки зрения точности, или, во-вторых, операция носит не одноразовый, а многократный характер. Как правило, операция манипулирования бывает не вполне ясна заранее, варьируется в широких пределах и часто настолько сложна, что изготовление специализированных механизмов оказывается экономически неоправданным.
В этом случае представляется рациональным использование манипулятора общего назначения. Манипуляторами общего назначения принято называть дистанционно управляемые механизмы, призванные выполнять требования оператора и производить вслед за ним манипуляции, функционально эквивалентные по своему характеру руке человека, т. е. механизмы, обладающие способностью захватывать различные предметы и имеющие достаточное число степеней свободы, чтобы перемещать предметы в любую зону рабочего пространства и придавать им почти любое положение [Л. 33]. Очевидно, что наиболее совершенным манипулятором мог бы быть дистанционно управляемый механизм, представляющий собой кибернетический функциональный эквивалент руки человека. Однако техническая реализация такого устройства для решения широкого круга задач манипулирования нецелесообразна и на современном уровне развития техники не представляется возможной. Это объясняется тем, что, несмотря на существенные успехи, достигнутые в области кибернетики и бионики, инженерно-технический персонал, разрабатывающий манипуляторы, не располагает необходимым арсеналом средств для создания технического устройства, обеспечивающего воспроизведение того разнообразия движений, которое может реализовать рука человека. Поэтому к решению этой проблемы подходят те позиций установления наиболее типичных, многократно повторяющихся операций и определения оптимума числа манипуляций, необходимых для выполнения поставленной задачи.
При манипулировании имеют место три типа операций. Операции первого типа (простые операции) заключаются в захвате твердых объектов и ориентации их в пространстве.
Для того чтобы исполнительный орган манипулятора имел возможность перемещать и надлежащим образом ориентировать захватное устройство и зажатый в нем объект, он должен обладать минимум тремя независимыми поступательными и тремя независимыми вращательными движениями. Кроме того, захватное устройство должно иметь еще одно независимое движение - раскрытие - смыкание захватывающих губ. Часто требуется предусмотреть дополнительные степени свободы, чтобы можно было изменить форму исполнительного органа, расширить область действия манипулятора (рабочее пространство) или уменьшить так называемый "конус недоступности" в шарнирных устройствах и т. п.
Исполнительный орган манипулятора должен быть легким, гибким, прочным, иметь запястный сустав для быстрого присоединения, смены или съема захватного устройства и обладать семью основными степенями свободы. Это позволит исполнительному органу развивать усилие в любом направлении или вращательный момент относительно любой из ее осей вращения. Жесткую конструкцию желательно монтировать таким образом, чтобы в случае необходимости сделать возможным изменение положения манипулятора или его перемещения в какое-либо новое место. Усилия и вращательные моменты не должны превышать определенных допустимых величин, чтобы избежать повреждения захватываемого объекта, оборудования, с которым контактирует манипулятор, и самого манипулятора.
К операциям второго типа - операциям манипулирования средней сложности - следует отнести захват и установку деталей в точно сопрягающиеся с ними неподвижные элементы аппаратуры. Допустим, что с поверхности стола необходимо взять цилиндр определенных размеров, переместить его и ввести в зажимный патрон, где он должен быть плотно закреплен. Оператор имеет возможность с помощью манипулятора поднести цилиндр к патрону и придать ему то строго определенное положение, какое он должен занимать, будучи зажатым в патроне. Однако оператор лишен возможности учесть небольшие отклонения от окончательной ориентации и точно установить цилиндр в требуемое положение. Такая установка цилиндра определяется свойствами патрона, а не манипулятора. Чтобы избежать возникновения больших усилий и обеспечить окончательную установку точно сочленяемых деталей, исполнительный орган манипулятора должен обладать определенной гибкостью. Гибкость обеспечивается либо упругостью исполнительного органа, либо проскальзыванием объекта в захватном устройстве, либо, как будет показано ниже, применением обратной связи. В качестве иллюстрации операций третьего типа - операций повышенной сложности - можно сослаться на случай, когда рычаг управления или ручка на неподвижно смонтированной аппаратуре приводится в действие дистанционно управляемым механизмом. Рычаг управления, как правило, имеет только одну степень свободы. Характер движения рычага управления и держащих его захватов манипулятора зависит от вида аппаратуры. Наглядным примером может служить вращение какой-нибудь коленчатой ручки. Оператор лишен возможности управлять манипулятором так, чтобы заставить его точно следовать по этому пути.
Орган управления, который приводится в движение, не в состоянии выдержать действие наибольших усилий, развиваемых манипулятором в любом направлении. Поэтому основная задача манипулятора заключается в том, чтобы усилия, развиваемые захватами, заставляли его придерживаться такой траектории движения, при которой большие силы прилагаются в направлении требуемого перемещения. При непосредственном управлении трудно заставить манипулятор следовать по жесткой траектории движения. Поэтому манипулятор, исполнительный орган которого достаточно гибок, допускает возможность осуществления некоторых из рассмотренных нами операций. Однако при управлении более сложными движениями, при которых прилагаемые усилия строго ограничиваются по величине, наиболее целесообразно ввести обратную связь с отражением усилия во всех основных движениях. Это дает возможность захвату придерживаться заранее установленной траектории движения и в то же время развивать необходимые усилия в требуемом направлении. Примерами такого двустороннего привода могут служить механические связи, подобные тем, которые находят широкое применение в копирующих манипуляторах.
Что касается количества воспринимаемой информации об исследуемых объектах, параметрах окружающей среды и самом манипуляторе, то оно прежде всего зависит от развитости воспринимающих датчиков или измерительных информационных систем.
При управлении манипулятором или роботом восприятие информации в основном идет по двум параллельным каналам: зрительным и тактильным. Принципы опознавания объекта по форме, характеру поверхности и другим параметрам биологических систем, используются в информационных роботах и биоманипуляторах. При этом следует иметь в виду, что в отношении пространственного восприятия между зрительным и тактильным восприятиями существует много общего. Как показывает анализ макродвижений, осуществляемых рукой (осязание) и глазом (зрение) в процессе восприятия, имеются два типа таких движений: 1) поисковые и установочные, 2) прослеживающие. Указанные типы движений значительно различаются по своим характеристикам. Первые направлены на поиск объекта и "исходной позиции" рецепторных аппаратов. Осязательная ориентировка, предшествующая тактильному восприятию объекта, складывается из двух фаз. Первая фаза - это поиск объекта в пространстве осязательного поля. Поисковые движения, как правило, непрерывны; тактильная информация, получаемая на этой фазе, минимальна и отрывочна. На следующей фазе, которую можно назвать установочной, руки совершают скользящие движения по поверхности объекта, определяя "начальную точку отсчета", по достижении которой они на некоторое время останавливаются. Пальцы рук совершают в районе "начальной точки отсчета" массу мельчайших приготовительных движений (микродвижений), обеспечивающих установку рук в наиболее удобную для восприятия позицию. С помощью этих движений определяется положение предмета в осязательном поле. Поисковые и установочные движения имеют место и при зрительном восприятии. С их помощью осуществляются выделение объекта восприятия, установление последовательности сигналов, подготовка рецептора к их восприятию в определенном месте.
С помощью движения второго типа осуществляется исследование (рассматривание, ощупывание) объекта. При сравнительном анализе прослеживающих движений руки и глаза можно выделить три основные функции прослеживающих движений: построения, измерения, контроля и корректирования. Эти функции обеспечивают формирование адекватного образа, формы, величины и положения воспринимаемых объектов. С точки зрения уменьшения нагрузки на канал связи между тактильным и задающим устройствами целесообразно применение тактильных элементов как более простых по сравнению с рецепторами зрения. Полную информацию об объекте можно представить в виде двух потоков информации [Л. 25]

где J1 - информация, поступающая от сенсорных элементов в центральный пункт управления по каналу связи; J2 - информация, поступающая от сенсорных элементов к локальным пунктам управления.
Локальный источник информации, или тактильная чувствительная поверхность, представляет собой как бы кусочек "кожи" с тактильными чувствительными элементами. На рис. 38 символически представлена тактильная поверхность. Каждый элемент в результате соприкосновения дает выходное напряжение, пропорциональное

где rs - множества по осям x и y;
Р - давление на датчик.
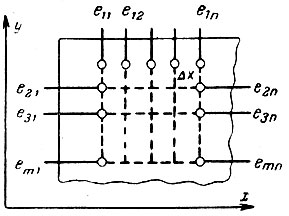
Рис. 38. Техническая модель участка кожи
То обстоятельство, что все функции f(P) не строго идентичны, не имеет существенного значения. Практический вариант сенсорной поверхности можно реализовать различными способами, например в виде сенсорной поверхности, уравнение которой имеет вид:

где x, y - координаты датчика.
Таким образом, сенсорные элементы определяют интенсивность стимуляции информации и место ее приложения.
Уравнение (15) нуждается в преобразовании. А именно, так как датчики дискретны, то уравнение сенсорной поверхности должно иметь следующий вид:

Из формулы (16) видно, что разрешающая способность x и y конечна. Этот факт соответствует реальной ситуации как в биологических, так и в измерительных системах, где разрешающие способности сенсорных элементов всегда конечны.
Опознание объекта, возможное при использовании сенсорных элементов, относится к его форме. Когда тактильной поверхностью охватывается объект, устанавливается однозначное соответствие между электрическим сигналом и формой предмета. Это легко понять, если взять две характерные геометрические фигуры. Предположим, что предметы, которые должны опознаваться, имеют круглое и прямоугольное сечение, как представлено на рис. 39, а и б. Соответствующие сигналы для этих двух форм показаны на рис. 39, в и г. Было сделано предположение, что r - переменная, но s = s0 - фиксированное. Ограничение не имеет значения. Если берутся различные по координате у секции руки, то сигналы на рис. 39, в и г также становятся функциями от s. Они могут оставаться неизменными в зависимости от того, сохраняет ли предмет свое сечение неизменным вдоль оси у. Соответствие электрических сигналов формам объектов, изображенных на рис. 39, в и г, становится очевидным из рассмотрения уравнения (16). А именно, в случае кругового сечения вся поверхность более или менее равномерно подвергается давлению. Таким образом, е = const для всех r. Постоянное выходное напряжение для кругового сечения соответствует гладкой поверхности. Но незначительная неровность поверхности не влияет на опознавание объекта.
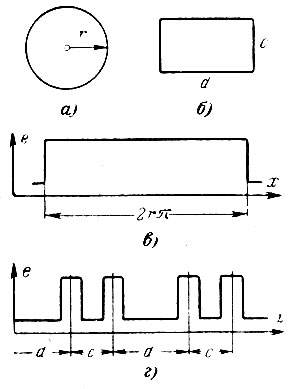
Рис. 39. Предметы и сигналы опознавания
В случае, когда познается тело прямоугольного сечения, части поверхности, которые не соприкасаются с предметом, обусловливают П-образную форму сигнала на рис. 39, г. Так как в этом процессе опознавания есть большая избыточность, то полученной информации будет достаточно, даже если не предполагается идеально гладкая (ровная) поверхность. Однако в случае сечений с гранями идеально будут существовать два подмножества r:

Расположение rα геометрически соответствует точкам поверхности, находящимся в соприкосновении с контурами объекта, и rβ - дополнительное множество к множеству R1 относительно суммарного множества R. Теперь уравнение сигнала имеет вид e = 1, если r ∈ R1, и е = 0, если r ∈ R2.
Посмотрим, как информация о форме объекта может быть направлена к центральному органу управления через канал связи, В техническом отношении для решения такой задачи требуется двумерная сканирующая система. Так как для целей опознавания формы объекта важно различие только между возбужденными и невозбужденными точками, то состояние поверхности характеризуется бинарной матрицей ers = 1 или еrs = 0 соответственно условию (17).
Дальнейшая необходимая информация может быть получена в тактильной чувствительной поверхности, а именно: если увеличивается число граней предмета, то укорачивается разница между сферической и многогранной формой. Если соответственно повышается разрешающая способность, т. е. Δх → 0, то можно будет степень грубости поверхности, находящейся в контакте с рукой, преобразовать в электрический сигнал. Таким образом, сигнал на рис. 39, в и г содержит информацию как о форме, так и о поверхности предмета в зависимости от разрешающей способности чувствительной поверхности. Оба эти эффекта обусловлены дискретной структурой сенсорной поверхности. Необходимо отметить, что идея определения характеристик объекта путем применения сенсорных элементов необходима в тех случаях, когда при дистанционном манипулировании емкости каналов связи оказываются недостаточными, а также нецелесообразно загружать центральный управляющий узел второстепенной информацией.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'