10. Кинематические и конструктивные особенности манипуляторов
При работе оператора с механическим манипулятором основные функции управления системой возлагаются на человека.
Собственно манипулятор служит только для передачи основных движений руки оператора на расстояние, а в ряде случаев для редуцирования этих движений и развиваемых рукой усилий.
Выше указывалось, что основная задача манипулятора заключается в воспроизведении движений руки человека. Поэтому, для того чтобы создать манипулятор, приближающийся по своим кинематическим и динамическим возможностям к руке человека, необходимо учесть биомеханические особенности руки.
В настоящее время имеется несколько разрозненных работ, посвященных рассмотрению и анализу кинематики руки человека и исполнительного органа манипулятора.
Как известно, изучением явлений, при которых тело человека или какая-либо его часть, например рука, пребывает в состоянии равновесия (статика), осуществляет различные движения (кинематика) и проявляет силовые воздействия или подвергается им (динамика), занимается биомеханика. Выделение биомеханики из механики обусловлено своеобразием двигательного аппарата человека, который при помощи центральной нервной системы имеет возможность осуществлять с большой точностью самые разнообразные движения.
Необходимо отметить, что без знаний биомеханических особенностей руки человека при выполнении различных движений нельзя определить научно обоснованного направления в создании нового типа манипулятора. С точки зрения механики рука представляет собой многозвенный "механизм". Кинематическая цепь костных звеньев "механизма" руки человека может быть представлена в виде схемы, показанной на рис. 40. (В целях упрощения ладонь руки представлена в виде плоскости.) Приняв ряд допущений, можно рассматривать руку как пространственный механизм, число степеней свободы которого равно 27 [Л. 26]. Практически это обеспечивает свободу осуществления разнообразных двигательных решений в пределах досягаемости руки. Можно сказать, что в структуре такого механизма отсутствует алгоритмическая последовательность отдельных исполнительных операций, т. е. сама конструкция такого манипулятора не фиксирует в себе определенной программы движения.
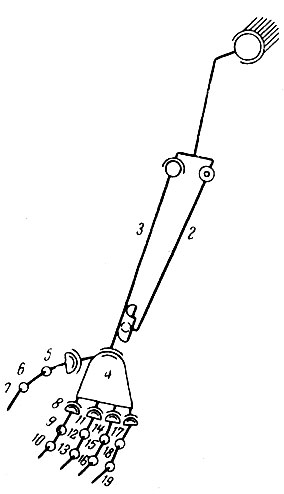
Рис. 40. Кинематическая модель руки
Очевидно, что весьма трудно получить уравнения координат отдельных точек такого манипулятора. Поэтому необходимо провести дальнейшее упрощение "механизма" путем сведения его к типичному четырехзвенному механизму (кисть, предплечье, подплечье и плечо). Он имеет три шарнира (плечевой, локтевой, лучезапястный), оси которых неизменны относительно осей звеньев. Четвертое звено закреплено неподвижно. Шарниры имеют соответственно 3,2 и 2 степени свободы; общее число степеней свободы равно семи.
Помимо большого разнообразия движений руки в целом кисть руки совместно с пальцами также обладает большой подвижностью, гибкостью и богатством возможных движений. Все это в пределах досягаемости пальцев обеспечивает захват предмета любой формы и дает возможность осуществлять различные действия над предметами при помощи пальцев. Кисть имеет много степеней свободы движения. За исключением большого пальца, остальные имеют по два вида степени свободы; с одной степенью свободы - два соединения и с двумя степенями - одно соединение [Л. 27].
На основе анализа действия пальцев человеческой руки можно сформулировать основные требования при проектировании манипуляторов, оборудованных захватными устройствами пальцевого типа:
1. Необходимо обеспечить независимость движения каждого пальца и точную координацию относительного движения пальцев для выполнения определенной работы.
2. Степень свободы каждого пальца должна быть не менее трех, чтобы обеспечить перемещение предмета в пространстве.
3. Минимальное количество пальцев должно быть равно трем, для того чтобы осуществить захват объектов различной формы.
4. Для обеспечения большего разнообразия движений одни из пальцев должен быть расположен напротив остальных.
Необходимо отметить, что манипулятор, оборудованный захватами пальцевого типа, будет успешно работать при условии решения проблемы распознавания образа предмета и его ориентации в окружающей обстановке. Однако выполнение этой задачи связано с чрезвычайной сложностью управления движениями многозвенных кинематических механизмов, каждая точка которых получает возможность двигаться любым образом по бесчисленному множеству равнодоступных траекторий. Например, кончики пальцев руки человека могут осуществлять движение по пространственным траекториям большого разнообразия. В живом организме всегда имеется возможность обосновать выбор и планировку того или иного движения. Для машины же необходимо предусматривать специальные распознающие, сканирующие, вычислительные и другие устройства, способные осуществить целесообразный выбор движения требуемого рода.
В качестве примера рассмотрим управление движением захватного устройства пальцевого типа в зависимости от формы схватываемого объекта.
Механизм захватного устройства манипулятора пальцевого типа Кто своему замыслу весьма сложен. Поэтому необходимо максимальною автоматизировать функции захвата предмета отдельными звеньями механизма. Этого можно добиться путем охвата механизма обратной связью [Л. 28], причем в данном случае система должна работать не по минимальной ошибке, а по максимальной. На первый взгляд, рука человека легко и просто охватывает предмет любой формы. Аналогичного эффекта можно достичь при использовании в следящей системы, работающей по максимальной ошибке, т. е. когда конечный эффект предусматривает соприкосновение максимальной части ладони с предметом.
Рассмотрим руку как единый блок, без регулирования его отдельных элементов - пальцев. Тогда, используя положительную обратную связь и объединяя чувствительный и регулирующий органы в один блок, получаем систему с двумя устойчивыми состояниями: разжатое и сжатое. Каждое из этих состояний зависит от того, какая сила больше, сила сжатия (n), или сила разжатия (m), т. е. какое из двух неравенств m > n или m < n имеет место. Это означает, что, прежде чем рука начнет сжиматься, входное воздействие должно превысить предельное значение. Основной недостаток такой системы заключается в том, что легкие или очень маленькие предметы не вызовут сжатия руки.
Однако помимо состояний сжатия и разжатия необходимо учитывать и вес предмета. Для этого в систему следует ввести измеритель веса, сигнал с которого может быть подан в общую систему; тем самым будет достигнуто приспосабливание системы к весу предмета.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'