11. Манипуляторы
В обширном классе манипуляторов можно выделить следующие три основные группы:
механические манипуляторы;
электромеханические манипуляторы;
биоэлектрические манипуляторы.
Это разделение носит несколько условный характер, так как при современном уровне развития техники нельзя провести резкой грани между отмеченными группами манипуляторов.
Механические манипуляторы являются механизмами многостороннего действия. В процессе манипулирования исполнительный орган не только повторяет (копирует) движения органа управления (фактически несколько видоизмененные движения руки человека), по и трансформирует усилия, прилагаемые оператором к органу управления.
Значительными недостатками механических манипуляторов являются небольшой объем рабочего пространства, охватываемый их исполнительными органами, которые из-за необходимости наличия кинематической связи с органом управления стационарно закрепляются в защищенной зоне, и ограничения по грузоподъемности, которые лимитируются силой руки оператора.
Вторая группа дистанционно управляемых систем - электромеханические манипуляторы - лишена многих особенностей копирующих манипуляторов, но обладает другими характерными чертами. (Исключение в этом отношении составляют электромеханические копирующие манипуляторы со следящими системами [55].) Как правило, электромеханические манипуляторы снабжаются односторонними приводами или приводами с регулируемой скоростью. Они приводятся в действие с помощью электродвигателей или гидропневматических систем с электрическим управлением. Практически они могут быть рассчитаны почти на любую грузоподъемность. Эти манипуляторы в известной степени согласованы с техническими возможностями оператора. Например, органы управления исполнительным механизмом манипулятора, как правило, расположены на пульте управления в определенном порядке. Поэтому их движение по направлению совпадает с тем движением исполнительного органа, которым они управляют.
Часто в этих манипуляторах предусматривается индикация усилия сжатия захвата.
Электромеханические манипуляторы по существу состоят из исполнительного органа, связанного с пультом управления электрокабелем и поэтому имеющего большую подвижность и как следствие этого способность обслуживать все точки рабочего пространства больших размеров. Для манипулирования с хрупкими предметами электромеханические манипуляторы оказываются малопригодными.
В последние годы внимание специалистов было обращено на разработки принципиально нового типа систем дистанционного управления. Речь идет о биоэлектрических манипуляторах, выделенных нами в третью самостоятельную группу.
Как известно, движению живого организма всегда предшествует изменение биотоков соответствующих мышц. Следовательно, любая произвольная "программа" действия живого организма находит отражение в совокупностях дискретных биоэлектрических импульсов [Л. 31].
Эти совокупности дискретных биосигналов принимаются в качестве общего кода при взаимодействии живого организма с внешним техническим устройством. Живой организм генерирует управляющие сигналы; органы исполнения технического устройства реализуют заданную этими биосигналами программу действия [Л. 43].
В настоящее время разработан ряд биоэлектрических систем управления, которые находят применение для различных целей управления.
Следует также указать еще на одну группу систем дистанционного управления, получивших наименование - сервоманипуляторы [Л. 32]. Эта группа дистанционно управляемых систем совмещает в себе достоинства механических и электромеханических манипуляторов. Движения исполнительного органа обусловливаются соответствующими движениями органа управления, а связь между ними осуществляется специальными сервомеханизмами. Сервоманипуляторы совмещают положительные характеристики электромеханических манипуляторов и гибкость исполнительного органа копирующего манипулятора.
Сервоманипуляторы применяются в основном в установках больших и средних размеров, в которых необходимо дистанционно выполнять операции повышенной сложности.
Необходимо отметить, что развитие вычислительной техники и ее использование в станкостроении привели к созданию манипуляторов с автоматическим управлением.
Идея оснащения автомата системой управления, предназначенной для воспроизведения процесса, запрограммированного оператором, на первом этапе нашла реализацию в машиностроении - в станках с программным управлением. Движения исполнительных механизмов станков-автоматов с цифровым управлением совершаются в точном соответствии с заложенной в него программой. При этом на устройства обратной связи, собирающие и перерабатывающие информацию, возлагается ограниченная задача: в соответствии с заложенной программой обеспечить относительное движение инструмента и заготовки.
Известные конструкции манипуляторов, основанные на этих принципах, рассчитаны на выполнение ограниченного комплекса операций.
Рассматриваемый ниже (в качестве примера) манипулятор по сути дела является аналогом обычной системы с программным управлением. В нем реализуется известная идея: закодировать и "запомнить" все действия оператора, связанные с выполнением определенных манипуляций, а затем запрограммированную информацию использовать для автоматического управления манипулятором.
Каждый шарнир управляющего органа манипулятора снабжается потенциометрическим датчиком, сигналы с которого поступают в коммутатор и кодирующее устройство. Запись обработанной информации производится на магнитную ленту или перфокарту. (Полученная таким образом программа может использоваться многократно.) Исполнительный механизм манипулятора оснащается считывающим устройством, коммутатором и сервоприводами для каждой из управляемых координат.
Рассмотрим теперь более подробно манипуляторы трех основных выделенных выше групп.
Механическими манипуляторами являются механические устройства, исполнительный механизм которых копирует движения рук оператора. Все движения захвата на исполнительной стороне совершаются синхронно движениям оператора. Управление манипулятором осуществляется специальной рукояткой управления. Механизмы привода являются двусторонними. Они имеют относительно высокий к. п. д., малую инерционность, небольшое трение. Так как информация о положении захватного устройства и развиваемом усилии (обратная связь) направляется обратно к управляющей рукоятке, оператор имеет возможность дать правильную оценку возникающим усилиям и действующим вращательным моментам. Работа с механическими копирующими манипуляторами требует небольшой тренировки и развития навыков у оператора. Грузоподъемность этих систем регламентируется силой руки оператора, приложенной к управляющему органу. Необходимо отметить, что наличие двустороннего привода позволяет расширить диапазон развиваемых усилий в сторону больших (или меньших) значений без ущерба естественному движению управляющей рукоятки и пропорциональности "ощущаемого" отраженного усилия нагрузки. Рассмотрение механических копирующих манипуляторов начнем с устройства, представленного на рис. 41. Копирующие манипуляторы этого типа находят применение в ряде областей [Л. 33].
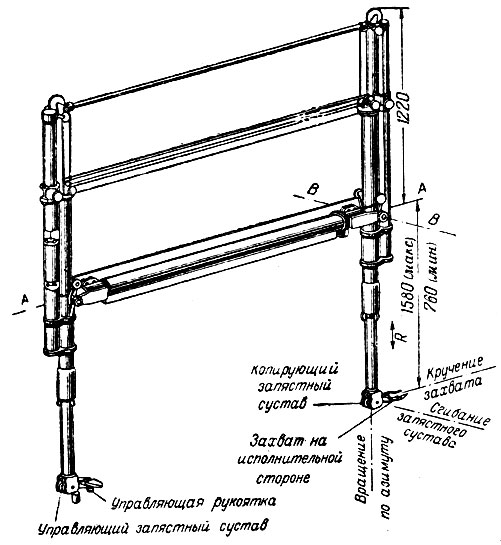
Рис. 41. Симметричный копирующий манипулятор
Манипулятор состоит из двух идентичных симметрично расположенных механизмов - органа управления и органа исполнения.
Управляющий и исполнительный механизмы конструктивно связаны между собой центральной трубой. Все движения управляющей рукоятки воспроизводятся и имитируются захватным устройством и копирующим запястным суставом исполнительной стороны. Оператор, управляющий исполнительным механизмом, имеет возможность удлинять или укорачивать его, вращать по азимуту, производить сгибание и разгибание запястного сустава, смыкание и разжатие губок захватного устройства и, наконец, осуществлять кручение захвата.
Разработаны некоторые разновидности этого типа манипуляторов. Так, например, существуют конструкции, в которых основные узлы смонтированы на центральной трубе, проходящей через проем в передней стене камеры. Обслуживаемое рабочее пространство значительно расширяется за счет телескопирования горизонтальной центральной трубы, перемещение которой осуществляется электроприводом. В другой модификации манипулятора этого типа центральная труба монтируется неподвижно, а манипулятор перемещается вдоль горизонтальной оси как единое целое. В этой системе движение тяговых лент значительно осложняется тем, что они проходят в горизонтальной трубе. Поэтому трение в этой конструкции достигает больших значений. Ленты, связывающие управляющий и исполнительный механизмы, для уменьшения трения выполняются из специального сплава. Исполнительный орган имеет возможность удлиняться до размера 1580 мм или укорачиваться до 760 мм. В манипуляторе предусмотрены сгибание запястного сустава, его вращение вокруг вертикальной оси, вращение захватного устройства, а также поворот всего исполнительного механизма вокруг оси.
В манипуляторе, представленном на рис. 42, важным свойством является то, что его исполнительный орган имеет возможность осуществлять масштабность - усиление (уменьшение) координатных параметров. Передаточное отношение кинематической цепи рассчитывается так, чтобы при продольном перемещении органа управления на величину х исполнительный механизм совершал аналогичное перемещение на величину kx. Передаточное отношение k варьируется и определяется в зависимости от конкретных задач и условий применения манипулятора.
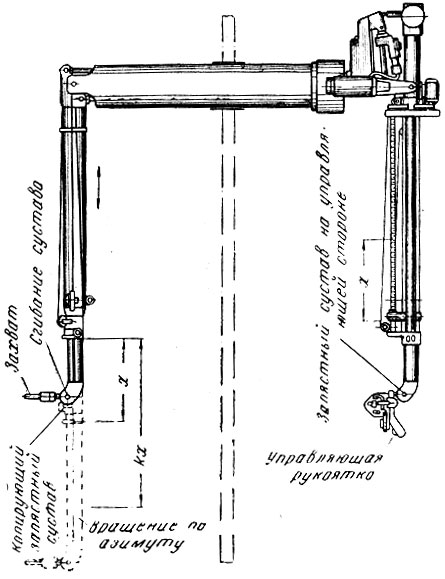
Рис. 42. Копирующий манипулятор с редукцией координат
В тех случаях, когда возникает необходимость абсолютной изоляции рабочего пространства, в котором осуществляется цикл работ, используется манипулятор, в котором предусмотрен герметизированный рукав для защиты от загрязнений. Для аналогичных целей предназначен также и манипулятор, представленный на рис. 43. Конструктивное выполнение органов управления в виде параллелограмма положительно сказывается на уменьшении габаритных размеров системы [Л. 34].
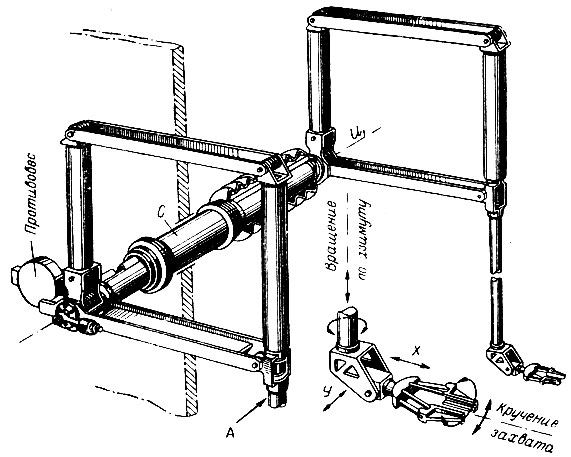
Рис. 43. Копирующий манипулятор с герметизированным сильфоном
Манипулятор имеет семь степеней свободы. Поступательное синхронное перемещение механизмов управления и исполнения вдоль осей x и z осуществляется с помощью параллелограммов, а вдоль оси y - в результате скольжения внутренней центральной трубы по наружной. Захватное устройство имеет возможность вращаться вокруг вертикальной оси и относительно продольной оси, сгибать свой запястный сустав и смыкать и разжимать губки. Для предотвращения возможности проникновения веществ из рабочей зоны через центральную соединительную трубу последняя снабжается специальным защитным устройством - гофрированным чехлом. В некоторых механических манипуляторах опускается ряд особенностей копирующих манипуляторов, но за счет этого достигается большая гибкость. Этим свойством обладает, например, манипулятор, исполнительный орган которого может занимать положение коаксиальное с горизонтальной трубой.
Отличительной особенностью такого устройства является то, что при вертикальном движении управляющего механизма вверх или вниз исполнительный механизм перемещается в противоположном направлении. Как правило, эти манипуляторы используются для работы с предметами весом до 4 кг.
Телескопическая конструкция исполнительного органа позволяет варьировать его длину в широких пределах. Конструкцией предусмотрено сгибание запястного сустава, вращение исполнительного механизма по азимуту и вращение захвата вокруг своей продольной оси.
Механические манипуляторы с магнитным приводом абсолютно Герметичны. Они находят преимущественное применение при выполнении работ в зонах больших давлений, глубокого вакуума, высокой радиации, так как позволяют передавать усилия (движения) руки оператора через "глухую" стенку без проемов для передаточных механизмов. По своим динамическим возможностям и удобству обслуживания эти манипуляторы уступают ранее рассмотренным. Они требуют соблюдения мер предосторожности при работе, производимой в непосредственной близости от приборов, аппаратов и оборудования, чувствительных к ударным нагрузкам.
Манипуляторы с магнитными муфтами могут быть двух типов: а) с торцевыми магнитными муфтами; б) с цилиндрическими магнитными муфтами.
На рис. 44 представлена принципиальная схема манипулятора с торцевыми магнитными муфтами, предназначенного для работы в высоковакуумной камере [Л. 35]. Все операции манипулирования осуществляются оператором с помощью органа управления через соответствующие кинематические цепи и элементы передач. По обе стороны прозрачного экрана 1, изолирующего рабочее пространство, установлены три пары магнитов 2, 3, 5. Наружные ведущие магниты кронштейнами жестко связаны с легкой тележкой 6, которая обеспечивает возможность требуемой ориентации захватного устройства внутри герметичной рабочей камеры. Манипулятор обладает следующими степенями свободы: возвратно-поступательным движением вдоль трех взаимно перпендикулярных осей (мобильностью тележки); мобильностью подвески 4 вдоль ее вертикальной оси (вращением левой пары магнитов) и смыканием губок захватного устройства. Последнее достигается вращением правой пары магнитов. Вращение захватного устройства вокруг вертикальной оси обеспечивается вращением через конические пары центральных магнитов. Крайние пары магнитов 3, 5 обеспечивают требуемые движения наматыванием или изматыванием стальных тросиков, пропущенных сквозь упругий элемент. Концы последнего крепятся к соответствующим кронштейнам подвесок.
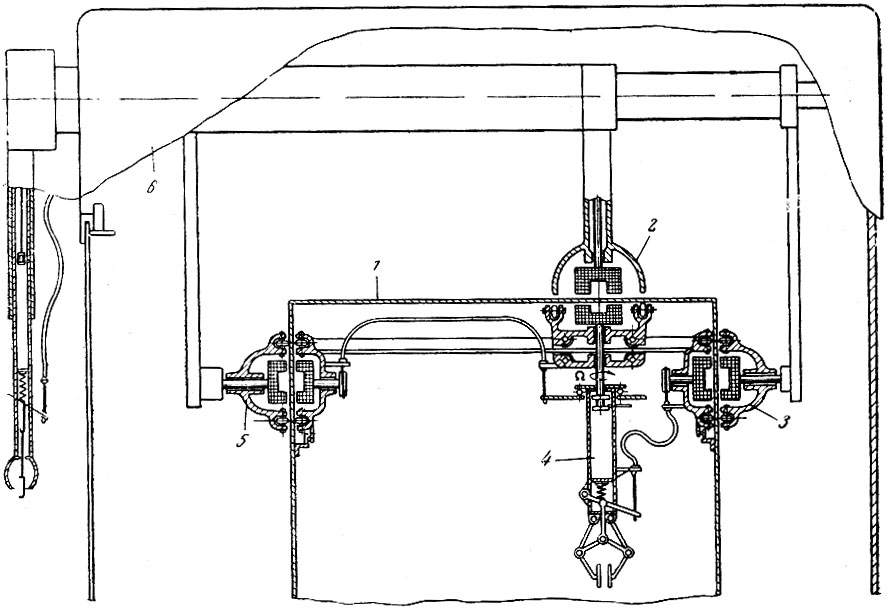
Рис. 44. Механический манипулятор с магнитным приводом
В другой модификации манипулятора с магнитным приводом усилия (движения) от управляющего органа к исполнительному передаются с помощью торцевых магнитных муфт сцепления, расположенных в одной плоскости [Л. 54]. Это обстоятельство позволяет транспортировать манипулятор в горизонтальной плоскости в требуемую зону обслуживаемого рабочего пространства, что делает его маневренным и работу с ним удобной.
Основным элементом кинематической цепи рассматриваемого манипулятора является сустав, представляющий собой дифференциал с коническими зубчатыми колесами. Такие дифференциалы имеются как на управляющем, так и на исполнительном органах.
Движения "изгиб - вращение" сустава осуществляются двумя магнитными муфтами.
При вращении сустава органа управления конические шестерни его дифференциала поворачиваются в разные стороны, а при изгибе - в одном направлении. Эти движения передаточным механизмом передаются коническим шестерням дифференциала исполнительного органа.
Движение "захват" осуществляется одной магнитной муфтой. При этом управляющий и исполнительный органы манипулятора также снабжаются дифференциалами с коническими шестернями. Движение управляющего органа вдоль вертикальной оси (вверх - вниз) магнитной муфтой, состоящей из двух полумуфт, находящихся по обе стороны разделительной перегородки, передается исполнительному органу. Последний при этом копирует движение управляющего органа.
Узлы магнитных приводов в этом классе манипуляторов имеют разнообразные исполнения. В качестве примера рассмотрим универсальное вспомогательное устройство с магнитными муфтами, представленное на рис. 45 [Л. 36].
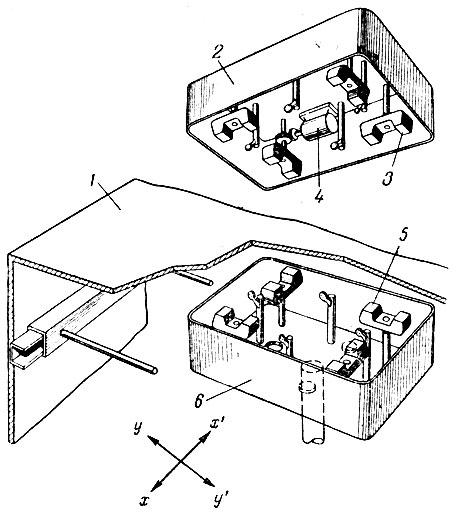
Рис. 45. Универсальный магнитный привод манипуляторов
Принцип действия универсального привода заключается в следующем. Пластина 1 играет роль защитного экрана рабочей камеры, внутри которой находится манипулятор. По обе стороны экрана расположены две подвижные коробки 2, 6. Внутри каждой коробки на вертикальных осях установлены по четыре магнита, которые, взаимодействуя между собой, образуют четыре связанные магнитные пары (например, 3-5). В качестве привода каждого магнита верхней коробки 2 используется индивидуальный реверсивный электродвигатель 4. Движение верхней приводной коробки в двух взаимно перпендикулярных направлениях x-x', y-y' обусловливается мобильностью связанной с ней легкой рамы, которая перемещается двумя реверсивными электродвигателями. Привод подвижных элементов манипулятора имеет различные механические передаточные устройства, жестко или фрикционно связанные с магнитами коробки, находящейся внутри камеры.
В манипуляторах с цилиндрическими магнитными муфтами сцепления передача усилий (движений) от управляющего органа к исполнительному осуществляется через цилиндрический стальной стакан [Л. 54]. Поэтому рассматриваемый тип манипулятора находит преимущественное применение при работах с токсичными веществами в камерах с высоким вакуумом или давлением.
Манипуляторы с цилиндрическими магнитными муфтами в отличие от манипуляторов с торцевыми муфтами, транспортируемыми в любую точку горизонтальной плоскости, монтируются стационарно.
Управляющий и исполнительные, механизмы этого манипулятора однотипны и по конструктивной форме выполнения аналогичны руке человека с кистевым, локтевым и плечевым суставами. Суставы выполняются в виде дифференциалов с коническими шестернями. Необходимо отметить, что конструктивное решение дифференциалов с коническими шестернями находится в прямой связи с величинами потерь усилий, передаваемых от управляющего к исполнительному органу. Потери могут достигнуть такой значительной величины, что дальнейшая эксплуатация манипулятора может стать невозможной. Этим, очевидно, и следует объяснить тот факт, что манипуляторы такой конструкции разрабатываются и рассчитываются на малую грузоподъемность.
Кинематика движений изгиб - вращение всех суставов управляющего и исполнительного органов одинакова. Ограничимся кратким рассмотрением принципа действия кистевого сустава. Конические шестерни дифференциала кистевого сустава управляющего органа при его вращении поворачиваются в разных направлениях, при изгибе - в одном направлении. Эти движения с помощью конических шестерен дифференциалов локтевого и плечевого суставов передаются цилиндрическим магнитным муфтам, состоящим из двух полумуфт. Через конические шестерни дифференциалов плечевого и локтевого суставов движение передается шестерням дифференциала кистевого сустава исполнительного органа, который вслед за управляющим повторяет движение изгиб - вращение.
В заключение следует еще раз отметить, что основным преимуществом рассмотренных манипуляторов является их способность обеспечения абсолютной герметизации рабочего пространства, причем изолирующая оболочка в местах перемещения магнитов должна обладать хорошей магнитной проницаемостью для обеспечения надежной связи между наружными и внутренними магнитами.
Электромеханические манипуляторы могут быть выделены в отдельный класс. Манипуляторы этого класса приводятся в действие электродвигателями, а в ряде случаев гидро- или пневмосистемами с электрическим управлением. Связь между органами управления и исполнения осуществляется с помощью кабелей. Эти манипуляторы требуют соблюдения большой осторожности при манипулировании с объектами, чувствительными к ударным нагрузкам и сжимающим усилиям.
Рассмотрим электромеханический копирующий манипулятор, представленный на рис. 46.
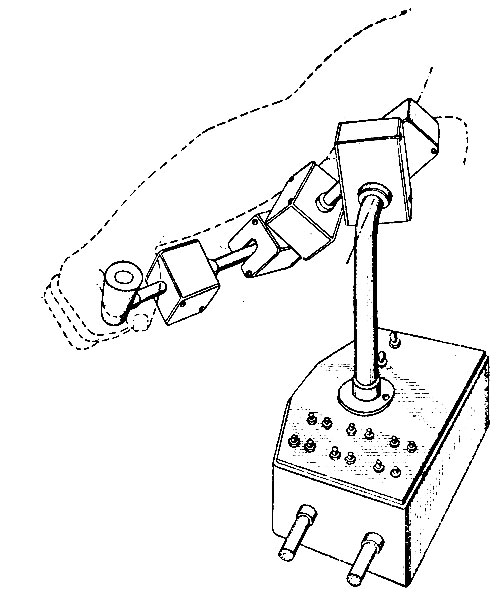
Рис. 46. Копирующий электромагнитный манипулятор
Управляющий орган манипулятора кинематически связан с рукой оператора и оснащен датчиками регистрации перемещений его звеньев. В качестве датчиков перемещений используются потенциометры, установленные на соответствующих звеньях управляющего механизма.
При рассогласовании углов поворотов потенциометров, собранных по балансной схеме, последняя включает соответствующие приводы звеньев исполнительного механизма. Управление, выполненное по такой схеме, удобно для оператора и отличается простотой и надежностью. Эта схема может иметь дополнительный выход на запоминающее устройство с регистрацией по амплитудному значению тока рассогласования или дополнительный датчик с дискретным сигналом на выходе в качестве датчика контроля положения. Исполнительный механизм этого манипулятора аналогичен задающему.
Представленный на рис. 47 электромеханический манипулятор консольного типа предназначен для обслуживания герметически изолированной рабочей камеры цилиндрической формы [Л. 38]. Крановый манипулятор этого типа применяется в рабочих помещениях обычной формы. Оба типа манипуляторов рассчитаны на небольшие нагрузки. Приводные устройства запястного сустава 5 и захватов 4 в целях экономии места вблизи запястного сустава монтируются в верхней части вертикальной колонны 1. Электродвигатели приводных устройств питаются от сети постоянного тока. Скорость и направление вращения регулируются оператором с помощью переключателей пульта управления. Оператор имеет возможность выбора одного из четырех значений усилий, развиваемых захватным устройством 4. Минимальное из них используется при выполнении манипуляционных операций с предметами небольшого веса, примерно до 400 г.
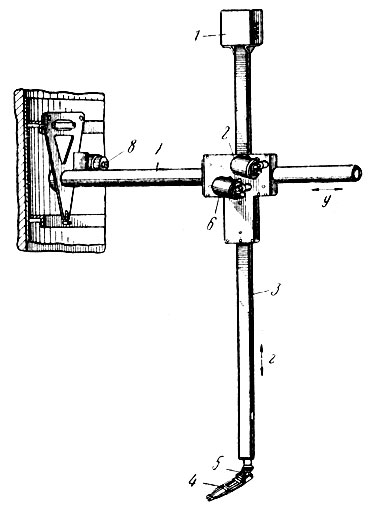
Рис. 47. Электромеханический манипулятор с электроприводом и тележкой
Электродвигатели и передаточные механизмы, осуществляющие различные движения запястного сустава, устанавливаются наверху колонны 1. Колонна снабжается зубчатой рейкой 3, посредством которой захватное устройство 4 при помощи электродвигателя 6 совершает перемещения вдоль оси z. Поперечное перемещение тележки вдоль оси у трубы 7 осуществляется с помощью электродвигателя 2. Передвижение манипулятора по рельсовым путям производится электродвигателем 8. Захватное устройство манипулятора 4 имеет следующие степени свободы: вращение по азимуту, кручение вокруг своей продольной оси, сгибание запястного сустава, смыкание и разжатие захватывающих губок.
На рис. 48 представлен другой тип электромеханического манипулятора кранового типа с подвижной тележкой. Он рассчитан на большие нагрузки, с помощью его можно приводить в действие специально сконструированные "ручные инструменты", например ножницы, молоток и т. п. В этом манипуляторе предусмотрена дистанционная схема захватных устройств. Манипулятор снабжается специальным измерительным прибором, указывающим усилие захвата. Максимально развиваемое усилие позволяет манипулировать с предметами, вес которых может достигать 30 кг. Управляется манипулятор с помощью рукояток, расположенных на специальном пульте управления. Манипулятор обладает следующими степенями свободы: движением тележки 2 вдоль корпуса 3 (вдоль оси у); передвижением корпуса 3 вдоль рабочего помещения (вдоль оси х); подъемом и опусканием захватного устройства 1 (вдоль оси z); сгибанием плечевого сустава 4, сгибанием запястного сустава 5, вращением захватного устройства по азимуту, вращением захватного устройства вокруг своей продольной оси, смыканием сжимающих губок. Необходимо отметить, что в манипуляторе данной конструкции передача движений от ведущих элементов к ведомым осуществляется с помощью специальных фрикционных механизмов. Наличие в кинематической цепи промежуточного фрикционного устройства устраняет опасность выхода из строя системы при перегрузках, так как в случае возникновения опасных усилий фрикционное устройство прекращает передачу движения. Каждое из вертикальных движений запястного сустава не имеет ограничений. Все три вращения захвата (в вертикальной плоскости, по азимуту и кручение) обеспечиваются одним двигателем. Выбор нужного направления вращения осуществляется с помощью электромагнитного сцепления и планетарной зубчатой передачи. Захваты приводятся в действие электродвигателем, автоматически останавливающимся в случае, если усилие сжатия достигает заранее установленной величины.
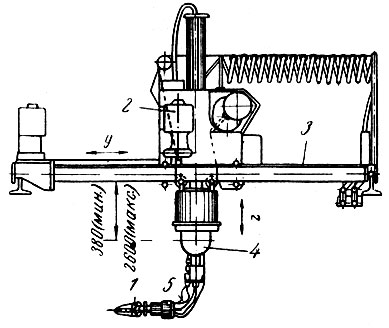
Рис. 48. Электромеханический манипулятор
Манипуляторы с гидроприводом находят преимущественное применение в рабочих помещениях, где возможность использования электромеханических систем управления исключается или требуются значительные развиваемые усилия при небольших габаритах.
В качестве примера систем этого класса рассмотрим манипулятор, принципиальная и конструктивная схемы которого представлены на рис. 49 и 50 [Л. 39]. Устройство и принцип действия манипулятора заключаются в следующем. Верхняя часть телемеханической руки состоит из жесткого центрального стержня 1 и двух пар сервомеханизмов. Первая пара 2, 3 совместно с центральным стержнем 1 образует трехзвенный шарнирный механизм.
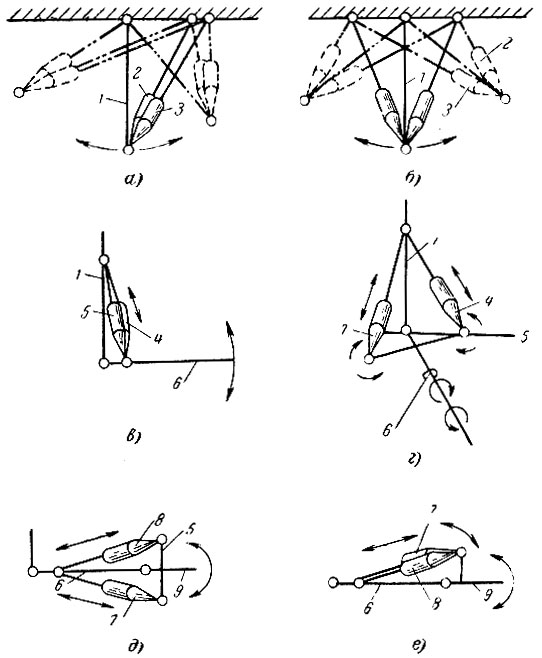
Рис. 49. Кинематическая схема манипулятора с гидроприводом
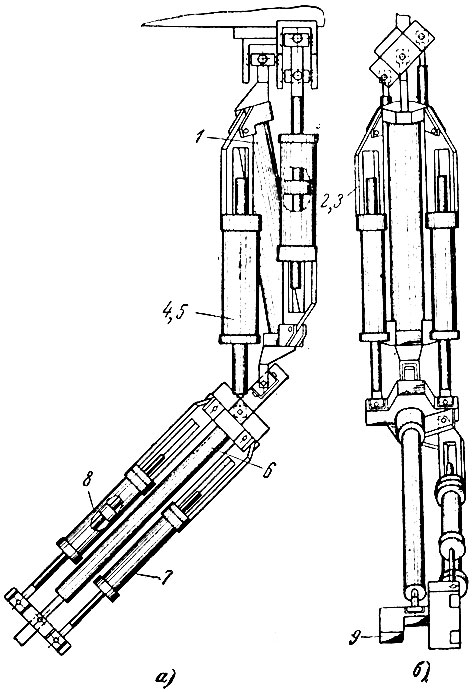
Рис. 50. Механический манипулятор с гидроприводом
При одновременном сокращении или удлинении боковых звеньев 2 и 3 (рис. 49, а, 50, а), что достигается втягиванием или выдвижением штоков поршней, происходит поворот "плеча руки" в плоскости чертежа. С другой стороны, если одно из звеньев укорачивается, а другое удлиняется, "плечо" начинает поворачиваться в плоскости чертежа (рис. 49, б, 50, б). Первая пара сервомеханизмов 2, 3 обеспечивает перемещение центрального стержня 1, закрепленного в неподвижной шаровой опоре, и, таким образом, свободный конец стержня перемещается по сферической поверхности. Вторая пара сервомеханизмов 4, 5 при одновременном укорочении или удлинении перемещает предплечье 6 в плоскости чертежа (рис. 49, б). Если же один из крайних стержней укорачивается, а второй удлиняется, предплечье 6 начинает поворачиваться вокруг своей продольной оси (рис. 49, г). Предплечье в свою очередь снабжается парой сервомеханизмов 7, 8, обеспечивающих поворот запястья 9 захватного устройства на некоторый угол в двух взаимно перпендикулярных плоскостях (рис. 49, д, е). Очевидно, что шарнирные соединения звеньев, совершающих движения в двух взаимно перпендикулярных плоскостях, должны выполняться в виде кардана.
Таким образом, этот тип манипулятора позволяет путем сочетания прямолинейных перемещений отдельных звеньев осуществлять сложное пространственное движение захватного устройства. Поскольку такой манипулятор состоит из простых однотипных элементов, он может найти применение при условии создания достаточно простой системы управления этими элементами.
В электрогидравлическом манипуляторе, представленном на рис. 51, оператор производит управление электромагнитными клапанами, с помощью которых от компрессора к механизмам привода подается регулируемое по величине давление. Пульт управления оператора снабжается кнопками, при нажатии которых происходит движение тележки 1 в прямом или обратном направлении. Манипулятор оснащен общим регулятором скорости и указателями положения. Захватное устройство рассчитано на работу с предметами, вес которых не превышает 40 кг. В манипуляторе предусмотрена возможность дистанционной смены захватного устройства с помощью ряда специальных приспособлений. Манипулятор обладает следующими степенями свободы: возвратно-поступательным движением несущей рамы крана 2 вдоль оси х; возвратно-поступательным движением мобильной тележки 1 вдоль продольной оси крана (ось у), привод этой тележки электрический; подъемом и опусканием захватного устройства 3 вдоль вертикальной оси z; сгибанием запястного сустава 4, вращением захватного устройства 5 по азимуту; кручением захвата и смыканием губок сжатия. Привод этих движений - гидравлический.
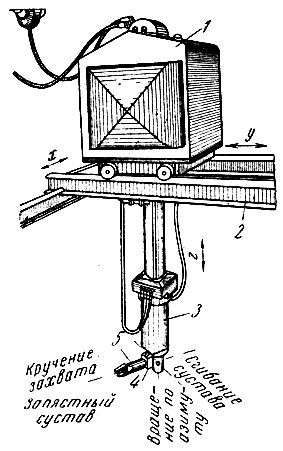
Рис. 51. Манипулятор с гидравлическим приводом
На рис. 52 представлена блок-схема электрогидравлического манипулятора, реагирующего на нагрузку.
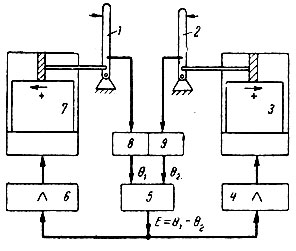
Рис. 52. Блок-схема электрогидравлического манипулятора, реагирующего на нагрузку
Манипуляторы этого типа снабжаются чувствительными микрофонными элементами, имитирующими органы осязания (тактильные элементы), и телевизионной системой, облегчающей работу оператора.
Блок-схема этого манипулятора включает следующие основные узлы: 1 - орган управления; 2 - орган исполнения; 3, 7 - сервомеханизмы органов управления и исполнения; 4, 6 - усилители; 8, 9 - датчики усилий; 5 - блок рассогласования.
Реакция системы на нагрузку обеспечивается тем, что сервомеханизмы исполнительного 2 и управляющего 1 органов имеют общий сигнал ошибки ε, который оказывает непосредственное воздействие от манипулятора на руку оператора через пульт управления. Небольшое расхождение в движении исполнительного и управляющего органов вызывает соответствующее корректирующее перемещение исполнительного органа. Одновременно оператор через обратную связь получает информацию о величине рассогласования, пропорциональной величине десинхронизации ε.
Система снабжается тремя типами обратных связей, информирующих оператора о положении исполнительного органа, силе и скорости. Сигналы положения и скорости вырабатываются соответствующими миниатюрными датчиками. Эти сигналы усиливаются и подаются к гидравлическим клапанам управления. Выбор в качестве привода гидравлической системы был обусловлен необходимостью сочетания больших усилий и компактности системы. Система обеспечивается устройствами стабилизации, балансировки и компенсации сил трения.
Микроманипуляторы составляют особый класс в манипуляционных системах и предназначаются для выполнения разнообразных операций над объектами весьма малой величины. Такие манипуляторы являются необходимым инструментом для проведения исследований, связанных с операциями над микроорганизмами, клетками живых организмов и растений. Однако область применения микроманипуляторов далеко не исчерпывается медициной и биологией. Например, в настоящее время микроманипуляторы находят применение в ряде автоматических научно-исследовательских лабораторий, предназначенных для поиска и исследований живой материи на других планетах.
Микроманипуляторы позволяют передать инструментам - микроскальпелю, микроиглам, микрозахватам и т. д. уменьшенные в сотни раз движения исследователя [Л. 40].
Элементы восприятия, схемы управления, вычислительные устройства и другие блоки в конечном итоге вырабатывают сигналы, которые приводят в действие исполнительные механизмы манипуляторов. Из всего разнообразия исполнительных механизмов остановимся только на тех, которые в тон или иной степени являются аналогами мышц.
Механизм сокращения мышцы до сих пор изучен не достаточно, чтобы иметь возможность имитировать его в технических устройствах. Видимо, потребуется еще немало усилий, прежде чем полностью раскроется механизм действия мышцы и появится возможность создать техническое устройство, основанное на принципе механизма сокращения мышцы.
Существует ряд устройств, действия которых аналогичны работе мыши. Кратко рассмотрим некоторые из них: поршневой, сильфонный элементы и мышечный элемент Маккибена [Л. 29]. Поршневой элемент является наиболее простым, но в нем требуются минимум два уплотнения, что увеличивает трение и уменьшает полезную мощность. Использование гидропривода в поршневых элементах приводит к снижению потерь мощности, но существенным недостатком при этом является трудность изготовления малоинерционных поршней.
Сильфонный элемент абсолютно герметичен, но имеет небольшое перемещение.
Мышечный элемент Маккибена является новым типом искусственной мышцы. Он состоит из расширяющейся резиновой трубки в оплетке (рукаве). Концы трубки и оплетки закреплены во втулках, причем одна втулка глухая, а через другую подается газ, раздувающий искусственную мышцу. В результате в "мышце" развивается сила. "Мышца" Маккибена абсолютно герметична, легка, подвижна и характеризуется незначительной "усталостью". Сила, развиваемая искусственной мышцей, зависит от ее длины, диаметра и давления подаваемого газа. Ее достоинством является также низкая стоимость.
Искусственная мышца должна выполнять два вида движений: пропорциональное сокращение и расслабление, поэтому возникает проблема удаления энергонесущего вещества после завершения сокращения. Углекислый газ является высокоэнергетическим сжимающимся нетоксичным газом, который может быть выпущен в атмосферу, что и определило его выбор в качестве рабочего вещества искусственной мышцы.
Интересно остановиться еще на одном новом принципе построения искусственной мышцы, который, возможно, в дальнейшем найдет применение в манипуляторах [Л. 30]. Он заключается в преобразовании химической энергии в механическую. Был создан макет, в котором синтетическое волокно сжимается и удлиняется без признаков усталости в зависимости от концентрации раствора. Сила подъема такого волокна превышает в 1000 раз собственный вес. Если использовать одновременно большое количество подобных волокон, то появится возможность применить их в качестве исполнительных элементов для манипуляторов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'