Глава III. Преобразовательные устройства промышленных роботов
Современные системы управления промышленными роботами обеспечивают информацию об основных параметрах их подвижных звеньев в процессе работы, для чего используются различные преобразовательные устройства. Например, информация о движении и положении рычажно-захватного устройства робота осуществляется с помощью потенциометров либо кодовых фотоэлектрических, индуктивных и других преобразователей.
Потенциометрические преобразователи, имеющие аналоговый выходной сигнал, обладают точностью и разрешающей способностью примерно до 0,05%, кодовые преобразователи имеют дискретный выходной сигнал и по сравнению с потенциометрами - повышенную разрешающую способность и большие размеры. Индуктивные преобразователи имеют аналоговый выходной сигнал, обладают большей по сравнению с потенциометрами точностью, разрешающей способностью и чувствительностью к помехам, используют токи повышенной частоты. Для информации об усилиях, возникающих в рычажно-захватном устройстве при зажиме и перемещениях изделий, могут также использоваться полупроводниковые кристаллические магнитоупругие тензометры и другие устройства. Для фиксации конечных положений подвижных устройств роботов широко используются различные типы концевых выключателей и упоров, хотя находят применение и преобразовательные устройства. Для непрерывного измерения скорости поступательного движения подвижных устройств можно использовать также тахогенераторы, а для преобразования этого движения во вращательное - специальные устройства*.
* (См.: Гуслиц В. М. Опредление некоторых основных характеристик автоматических манипуляторов. - Механизация и автоматизация производства, 1978, № 4.)
Преобразовательное устройство для информации о силах и моментах, действующих на захватное устройство робота, возникающих при его контакте с зажимаемым объектом, состоит из нескольких тензоиреобразователей. Принцип одновременного измерения такого ряда параметров тензорными преобразователями (а также пьезоэлектрическими, пьезорезистивными) основан на их преобразовании в электрические заряды или изменении сопротивления упругой деформации измеряемого тела, возникающей под действием измеряемых сил.
На рис. 11 показано следящее устройство с преобразователями обратной связи системы управления роботом. Оно состоит из фокусирующей линзы 1, осветительной лампы накаливания 2, фотоэлемента 3, вычислительного устройства 4 и масштабной линейки 5. Кодирующее устройство, пересчитывающее длину пройденного пути в количество дискретных шагов, устанавливается на самом роботе. Величина дискретного перемещения составляет 0,01 мм, наибольшая возможная частота импульсов - 10 млн. в секунду.
К основным типам современных алгоритмов управления промышленными роботами относится детерминированное управление, управление с видеоинформацией, управление с информацией об окружающей обстановке в непосредственной близости от робота, управление с осязательной и инерционно-силовой информацией.
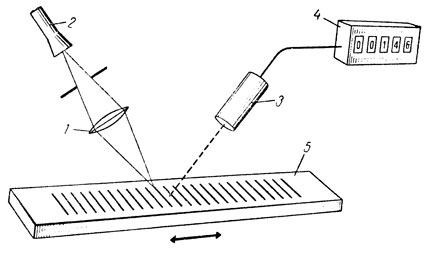
Рис. 11. Схема следящего устройства с преобразователем обратной связи
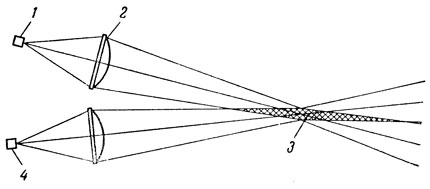
Рис. 12. Схема преобразователя для информации об окружающей среде
При детерминированном управлении оператор определяет только перемещение рычажно-захватного устройства, в алгоритм закладывается логика последовательности выполнения отдельных операций. Реализация алгоритмов детерминированного управления осуществляется переводом входных команд оператора в команды для отдельных подвижных частей робота и управлением ими с помощью внешних преобразователей и может производиться выбором конечной точки, определенного пути, направления и скорости перемещений. По алгоритму управления по конечной точке, применяемому в отсутствие ограничений на положение и ориентацию рычажно-захватного устройства в промежуточных точках перемещения, оператор определяет положение и ориентацию этого устройства только в конечной точке движения. В алгоритме выбора определенного пути движения задаются путь и ориентация рычажно-захватного устройства по его траектории. В алгоритме управления по направлению и скорости перемещения робота оператор определяет только направление и скорость движения его в системе координат. Находят применение также комбинированные алгоритмы из указанных способов детерминированного управления.
В алгоритме управления с информацией об окружающей обстановке информация поступает от преобразователя (расположенного на рычажно-захватном устройстве робота), состоящего из источника света 1, линзы 2, элемента 3, отражающего поверхность, и приемника 4 (рис. 12). Принцип работы преобразователя следующий. Элемент, отражающий поверхность, расположенный в фокусе оптической системы, помещается вблизи корпуса преобразователя. Если в поле зрения этого элемента попадает препятствие, то световой конус деформируется и выходной сигнал приемника 4, служащего для управления движением подвижных частей робота, уменьшается. Блок-схема алгоритма управления роботом с преобразователем окружающей обстановки, реализующим прекращение движения рычажно-захватного устройства в случае препятствия (на расстоянии 60 мм от конца захвата) и подъем после его устранения вертикально вверх на 250 мм, включает в себя команды: "продолжать движение", "присутствует препятствие", "стоп", "продолжать движение до 250 мм", "пуск", "программа", "конец программы". В функции оператора при этом входит определение конечной цели рычажно-захватного устройства и задание параметра, указывающего номер управляющего алгоритма. Установка нескольких таких преобразователей дает возможность применения более гибких и усовершенствованных алгоритмов по сравнению с алгоритмами с одним преобразователем.
При управлении осязательной информацией, осуществляемом преобразователем осязания, смонтированным на рычажно-захватном устройстве робота, преобразователь получает и передает информацию о величине и распределении давления на поверхности контакта зажимаемого изделия и захвата. Алгоритм управления инерционно-силовой информацией, применяемый при сборке различных изделий, осуществляется с помощью инерционных и силовых преобразователей. Они объединяют полученную информацию о силах, прикладываемых к объекту, вдоль трех координатных осей перемещений рычажно-захватного устройства робота. Для информации о внешней среде могут использоваться телевизионные камеры, расположенные под рабочей зоной робота или смонтированные на его захватном устройстве, фотопреобразователи, размещенные неподвижно над движущимся конвейером, сканирующие дальномеры локационного типа в радио-, оптическом (лазер) или ультразвуковом диапазоне волн и др.
К основным свойствам систем адаптации промышленных роботов, включающих устройства для восприятия окружающей среды и принятия решений, относится адаптация к конфигурации, массе и положению деталей. Основной алгоритм адаптивно-управляемого робота включает в себя две стадии - обучение и рабочую. Для управления группой адаптивных роботов ЭВМ должна иметь высокий уровень языка и нелинейную организацию памяти, а также параллельную децентрализованную систему управления.
Как отмечалось выше, к одному из основных видов алгоритмов управления положением рычажно-захватного устройства робота можно отнести алгоритмы определения конечной точки и траектории и алгоритмы управления по направлению (скорости) движения рабочих органов. Алгоритм определения конечной точки рычажно-захватного устройства, используемый исключительно при отсутствии ограничения на траекторию движения, позволяет выбрать значения переменных параметров, определяющих положение элементов этого устройства. При наличии таких ограничений применяются алгоритмы определения траектории, а также алгоритмы, использующие методы распознавания образов. Алгоритмы управления по направлению (скорости) обеспечивают управление элементами рычажно-захватного устройства относительно направления и скорости его движения в заданные интервалы времени.
При дистанционном управлении роботами используется информация визуальная и невизуальная: о расстоянии в заданных направлениях до изделия - от преобразователей сближения, смонтированных на захватном устройстве, о площади контакта между захватами и изделием и распределении давления по ней - от тактильных преобразователей, об усилиях и моментах зажима - от преобразователей усилий и моментов, расположенных в захватах. При управлении роботом с помощью ЭВМ возможно автоматическое формирование и выполнение команд с учетом информации от преобразователей и автоматический поиск данных о внешних условиях. В алгоритмах управления от преобразователей визуальная информация попользуется для задания на входе алгоритма первоначальных данных о геометрических параметрах изделия и для проверки результатов манипуляций, а информация от преобразователей сближения используется для автоматического обхода препятствия. Тактильные преобразователи обычно используются для поиска, определения положепия и ориентации изделия относительно контактной поверхности захватов. В отдельных случаях тактильные преобразователи используются совместно с преобразователями усилий и моментов, часто применяемыми при сборке несложных узлов.
Программа, обрабатывающая информацию от преобразователей сближения, может выполнять одновременно (и независимо) сбор и отображение в реальном масштабе времени информации от преобразователей, останов и фиксацию положепия рычажно-захватного и других устройств робота, автоматически простые движения - поворот захвата или возврат к некоторой точке при получении определенного сигнала от преобразователя и т. п. На базе этих функций можно создать более сложные алгоритмы автономного управления роботом, например алгоритм обхождения препятствий, предусматривающий останов робота, если на линии движения рычажнозахватного устройства (на расстоянии 60 мм) появится объект, затем его вертикальный подъем на 250 мм и дальнейшее движение к заданной точке.
Для распознавания объемных форм деталей рычажнозахватные устройства роботов снабжаются системами из различных тактильных, ультразвуковых, оптических и других преобразователей. С этой целью используются также телевизионные камеры, линейные матрицы фотопреобразователей, скользящий щелевой луч света, лазеры дискретного излучения и т. п.
Тактильный преобразователь для опознания трехмерных деталей представляет собой плиту с отверстиями для стержней с преобразователями, которая путем дискретных перемещений опускается на деталь. При каждом перемещении плиты преобразователи стержней подают сигнал о касании объекта стержнем для переработки в ЭВМ. Созданы также тактильные чувствительные элементы, использующие скачкообразное изменение контактного сопротивления в месте пересечения пучков графитовых волокон, импульсные ультразвуковые дальномеры, оптическая система опознали я двумерных объектов с помощью телевизионной камеры, у которой сигнал вырабатывается при пересечении контурной линии объекта с ее оптической осью.
В тактильных преобразователях, разработанных в Японии, луч лазера направляется па поверхность объекта с помощью системы из наклонного и вращающегося зеркал, а отраженный луч попадает в фотоэлектронное приемное устройство. По положению зеркал при регистрации наибольших значений отраженного луча можно определить расстояние от захвата робота до поверхности объекта. Микро-ЭВМ перерабатывает получаемую от видеопреобразователей информацию и управляет роботом.
Тактильные преобразователи, основанные на изменении электрического сопротивления при нажиме, изготовляются из различных волокнистых материалов - графитовых волокон, пенопластов с графитовым наполнением, кремниевых, резиновых материалов, армированных металлом или графитом. Например, создан тактильный преобразователь из 80 контактных чувствительных элементов, установленных в захватном устройстве робота и образующих матрицу. При движении захвата по координатной оси (например, х) элементы соприкасаются с поверхностью распознаваемого объекта, от формы которой зависит последовательность их срабатывания. В ЭВМ вводится информация о числе и расположении элементов, соприкасающихся с поверхностью изделия. Конфигурация изделия характеризуется совокупностью точек в пространстве, полученных при сечении выборочными плоскостями, форма сечений определяется релейными тактильными чувствительными элементами.
Программное обеспечение распознавания роботом изделий цилиндрической, конусной и других форм, сечение которых представляет окружность или выпуклый многоугольник, состоит из системы программ, осуществляющих ввод информации о форме изделия в процессор, выделение элементов, которые вошли в соприкосновение с изделием при перемещении захвата, преобразование информации в форму трехмерных координат, поворот системы координат и выделение из данных о конфигурации изделия точек, определяющих его очертание, вывод результатов на печатающее устройство.
Использование ультразвуковых преобразователей позволяет определить пути прохождения сигналов небольших уровней через усилители и детекторы. В сенсорных чувствительных устройствах в качестве ультразвуковых преобразователей используются пьезоэлектрические резонансные кристаллы, позволяющие определять относительные скорости робота и рабочей среды по припципу Допплера при работе в импульсном, фазовом или частотно- модулированном режиме. Параллаксные преобразователи используются для преобразования двухмерного изображения в одномерное, позволяют получить изображение узкого участка объекта быстрее, чем его изображение целиком. Практически целесообразно выделение горизонтально расположенных участков изображения и непрерывное сканирование изображения. Для этого может быть использована линейно сканирующая телевизионная камера, выходной сигнал которой зависит от яркости.
Система из трех преобразователей дает возможность измерить перемещение, например, рычажно-захватного устройства робота в пространстве, скорость, ускорение, угловое и колебательное движения. Преобразователи отличаются малым потреблением электроэнергии. При бесконтактном способе передачи информации преобразователи этого типа имеют малые габариты и массу, низкую инерционность, высокое быстродействие и простое преобразование выходного сигнала. Их использование связано с применением магнитной системы. Градиент магнитного поля (зависящий от конструкции магнитной системы) составляет 1 Г/мм, первичная магнитная чувствительность элемента (кремниевого при микроэлектронной технологии изготовления) - 700 мВ/т при токе 5 мА, чувствительность по перемещению - 700 В/мм, коэффициент усиления - 100.
Некоторые оптические бесконтактные чувствительные преобразователи, смонтированные на рычажно-захватном устройстве робота, для формирования сигнала управления в качестве источпика света используют близкий к ИК- диапазону светоизлучающий диод, работающий на длине волны 0,94 мкм, и силиконовые детекторы.
Созданный в США промышленный робот, способный различать форму и пространственную ориентацию изделия, имеет телеоптическую обратную связь и малую ЭВМ, получающую телеинформацию и вырабатывающую команды управления (в отличие от других роботов, у которых для этого применяются устройства лазерной оптики и чувствительные позиционные датчики, базирующиеся
па преобразовании энергии ИК-лучей). Робот с таким устройством обладает широкими логико-апалитическими свойствами, в частности способностью опознавать цвета объекта; по мере накопления новой информации он может периодически перепрограммировать себя в автоматическом режиме. Телевизионный чувствительный элемент другого промышленного робота для распознавания и позиционирования деталей, управляемого микро-ЭВМ, основан на классификации возможных стабильных положений выбираемых деталей относительно поверхности конвейерной ленты. Контурное изображение изделия при этомапализнруется обычной 625-строчной телекамерой, расположенной вертикально по отношению к плоскости ленты. Для каждого стабильного положения детали составляется стандартное описание в виде совокупности точек пересечения ее контурного изображения с растровой сеткой телекамеры, для чего может использоваться лишь часть строк растра. Распознавание и позиционирование деталей осуществляются сравнением текущего описания с описаниями, хранящимися в памяти ЭВМ, и сопоставлением его с одним из стандартных описаний.
У японского робота устройство для обнаружения и определения величины изделия состоит из двух пар фото-приемников с параллельными оптическими осями; расстояние между приемниками регулируется в. широком диапазоне кулачком с приводным шаговым двигателем. Фотоприемники с кулачком и шаговым двигателем установлены в объективе, оптические оси фотоприемников расположены в горизонтальной плоскости. Принцип работы устройства следующий. При включении робота устройство работает в режиме поиска. Электродвигатель вращает объектив, пока оптические оси фотоприемников не пересекут изделие (используется оптическая контрастность изделия). При обнаружении изделия объектив останавливается, шаговый двигатель поворачивает кулачок, который разводит фотоприемники до тех пор, пока оптические оси внешних фотоприемников не выйдут за пределы изделия (а оптические оси внутренних фотоприемников продолжают пересекать его). Поскольку оптические оси фотоприемников параллельны, а расстояние между изделием и объектом небольшое, расстояние между фотоприемниками соответствует величине изделия.
У другого японского робота на захватном устройстве расположены светодиоды, работающие по принципу отраженного света, помогающие роботу опознавать изделия сложной формы. Светодиоды осуществляют измерение расстояния до детали, по которому робот, снабженный дополнительно двумя телекамерами и обладающий функциями слежения, определяет ее наличие или отсутствие.
Устройства для ориентирования грузов, подлежащих захвату роботом, выполняются применительно к одному конкретному изделию, при смене которого необходимо заменить ориентирующее устройство или произвести его переналадку. Это существенно сдерживает использование промышленных роботов при мелкосерийном производстве.
В ФРГ разработано устройство, оснащенное видео-преобразователем, который по заданной программе определяет положение поступившего изделия. Информация о положении изделия передается в систему управления роботом, который ориентирует захват и переносит изделие в рабочую позицию. Транспортируемый груз наблюдается в проходящем свете, при котором определяются черно-белые переходы не более чем в 5 строк при развертке изображения в 625 строк. Это существенно сокращает (до 70 мс) время опознавания и необходимую емкость памяти системы управления, позволяет использовать микропроцессор.
У пневматических преобразователей для бесконтактной регистрации объектов (рис. 13) на незначительных расстояниях (менее 1 мм), основанных на принципе сопло-заслонка (рис. J3, а), сжатый воздух из канала 7, подсоединенного к источнику питания, через сопло 2 и канал 5, от которого ответвляется выходной канал 4, поступает в атмосферу. Если объект 5 приближается в осевом или поперечном направлении на расстояние в несколько десятых миллиметра, в выходном канале устанавливается давление, перерабатываемое как аналоговый сигнал струйными элементами.
Преобразователи аналогичного назначения для расстояний около 15 мм имеют кольцевую струю сжатого воздуха - в отсутствие объекта его поток через кольцевой канал 1 |(рис. 13, б) и кольцевое сопло 2 беспрепятственно попадает в атмосферу. Из-за эффекта подсоса и возникающих завихрений в выходном канале 3 давление понижается. При приближении объекта на определенное расстояние часть струи воздуха отклоняется в направлении выходного канала, вызывая в нем подъем давления. Выходной сигнал зависит от расстояния (нелинейный характер), из-за турбулентности потока имеет высокий уровень шума. Для таких же целей используются преобразователи, базирующиеся на принципе сопло - приемный канал (рис. 13, в), у которых при отсутствии объекта струя воздуха из сопла 1 беспрепятственно попадает в приемный канал 2, создавая давление.
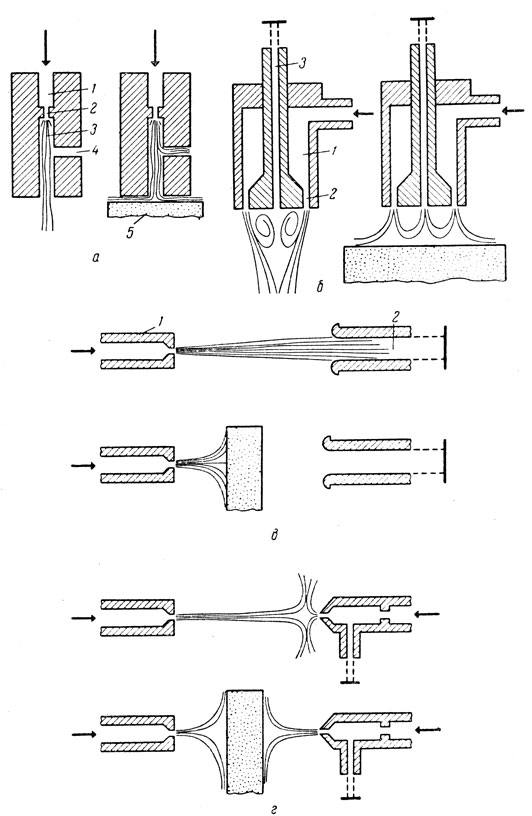
Рис. 13. Схема действия пневматических преобразователей
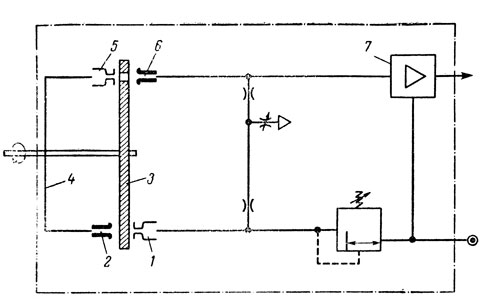
Рис. 14. Струйный преобразователь скорости вращения
У преобразователя, работающего на принципе взаимодействия двух противоположно направленных соосных струй (рис. 13, г), струи из двух сопел направлены навстречу друг другу. При перемещении объекта струя воздуха из левого сопла прерывается, вследствие чего струя из правого сопла свободно истекает в атмосферу и давление падает. Преобразователь оснащен ультразвуковым генератором (50 кГц), при включении которого в отсутствие объекта ламинарный характер истечения струи из сопла нарушается и давление в приемном канале снижается до атмосферного; при прерывании ультразвукового луча объектом давление повышается. Учитывая хорошее отражение ультразвуковых волн от многих типов объектов, передатчик и приемник располагают в непосредственной близости один от другого.
Струйный преобразователь скорости вращения (рис. 14) имеет шесть диапазонов измерений (от 0-200 до 0-3000 об/мин). От регулятора давления поток воздуха через линию питания поступает в управляющее сопло 1, которое от приемного сопла 2 отделено перфорированным диском 3 с отверстием, расположенным против его неперфорированного участка. Поэтому струя воздуха, исходящая из управляющего сопла, периодически прерывается, образовавшийся импульс давления распространяется со скоростью звука в линии задержки 4 и поступает во второе управляющее сопло 5. Чем выше скорость вращения диска, тем большая часть импульса улавливается приемным каналом 6 и усиливается усилителем 7.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'