Блочно-модульные устройства, механической части промышленных роботов
Основные модули, особенно механической части (основание, рычажные, захватные, поворотно-подъемные и другие устройства), в зависимости от назначения и основных параметров робота часто имеют несколько конструкций. Разработанный в СССР типовой ряд унифицированных элементов механической части роботов позволяет создавать роботы различного назначения с разными системами приводов (пневматический, гидравлический, электрогидравлический) и управления (цикловое и числовое программное и др.) *.
* (См.: Козырев В. Т. и др. Цикловые манипуляторы агрегатного типа для металлорежущих стапков, - Механизация и автоматик зация производства, 1977, № 3)
Модульный принцип положен в основу комплекта из 10 типоразмеров напольных стационарных и передвижных роботов с гидравлическим приводом и позиционноцикловой системой управления (модель СМ40) для обслуживания 30 моделей металлорежущих станков токарной группы с горизонтальной осью шпинделя. Этот типовой ряд создан на базе 16 унифицированных модулей механической части: четырех типоразмеров рычажных
устройств для перемещения, зажима, поворота или кантования заготовки; трех типоразмеров захватов для деталей типа валов и фланцев; трех типоразмеров устройств для размещения рычажных устройств; двух типоразмеров устройств к приводам для линейного перемещения и вращательного движения рычажных устройств; одного типоразмера стола для размещения специальной тары для заготовок; трех типоразмеров программных барабанов для программирования движения стола, а также линейного и вращательного движений рычажного устройства. У всех роботов, созданных на базе этих модулей, предусмотрен гидравлический привод из гидроцилиндров (расход масла 20-25 л/мин, давление до 63 кгс/см2) с электроуправлением от индивидуальных золотников. Цикловая позиционная система управления - с ограниченным числом точек позиционирования и программоносителем в виде командоаппарата. Алгоритм задается соответствующим набором шариков в командоаппарате, а смена программы осуществляется заменой его программного барабана.
На базе этих модулей и унифицированных устройств - двух- и трех шарнирных рычагов, приспособлений для поворота и подъема рычажно-захватного устройства, каретки монорельса и захватного устройства - ЭНИМСом разработан типовой ряд* универсальных и специализированных промышленных роботов различного назначения с широким диапазоном параметров (табл.).
* (Там же.)
За рубежом также широко используются блочно-модульные конструкции промышленных роботов. Так, в Японии фирмой "Мицубиси" созданы блочно-модульные конструкции основных элементов механической части роботов: передвижных и напольных стационарных оснований с поворотной колонной, рычажного устройства, двухступенчатой телескопической конструкции, которая при необходимости может быть использована как одноступенчатая и как колонна для вертикального возвратно - поступательного перемещения. Созданы унифицированные блочно-модульные устройства для возвратно-поступательного движения рычага в вертикальной плоскости без его наклона и с наклоном, для закрепления, поворота и наклона захвата.
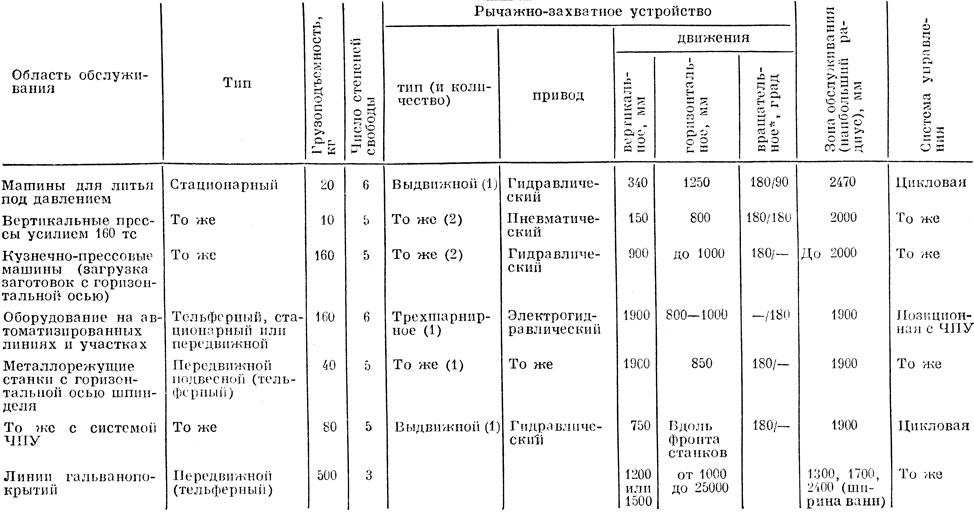
Таблица. Технические характеристики и области обслуживания типового ряда промышленных роботов различного назначения
* (В числителе - вокруг вертикальной оси, в знаменателе - вокруг горизонтальной.)
Использование унифицированных конструкций передвижных оснований позволяет создавать роботы с движением рычажно-захватного устройства в системе ортогональных и цилиндрических координат (возвратно-поступательное движение в горизонтальной плоскости по осям x, y, т. е. вперед-назад и налево-направо, и в вертикальной плоскости по оси у, т. е. вверх-вниз. Стационарное основание используется для стационарных роботов, а также в комбинации, например, с блочным устройством для передвижения рычажного устройства налево-направо. Использование модульно-блочной двухступенчатой телескопической конструкции рычажного устройства для возвратно-поступательного горизонтального движения позволяет увеличить зону обслуживания и объем рабочего пространства, применять его при одноступенчатой конструкции для роботов повышенной грузоподъемности. При вертикальной установке такое рычажное устройство можно использовать для движения вверх- вниз (например, при подвеспых роботах). Кроме того, при модульно-блочной двухступенчатой телескопической конструкции рычага можно захватывать грузы, расположенные на небольшой высоте от пола.
Блочно-модульная конструкция для наклона рычажного устройства применяется у роботов с большим диапазоном вертикального (вверх-вниз) движения. Система поворота рычажного устройства применяется при использовании модульно-блочной конструкции механизма останова в системе двухпозиционного пневмоуправления для получения дополнительно двух промежуточных точек положений. Для движения захвата вверх-вниз (ось z), налево-направо (ось у) и вращения (поворота) используются такие же модульные блоки, как для рычажного устройства с соответствующим креплением оси. Например, подвесной передвижной робот можно создать использованием блочного устройства для вертикального движения рычажного устройства. Предусмотрена взаимозаменяемость между гидравлическим сервомеханизмом и двух- позициопным пневматическим механизмом, механический стопор для установки положений, гидравлический армотизатор в механизме останова и малогабаритный клапан повышенной пропускной способности в системе с двухпозиционным ппевмомеханизмом, обеспечивающие быстродействие; в системе управления использованы контактные элементы блочно-модульных конструкций роботов.
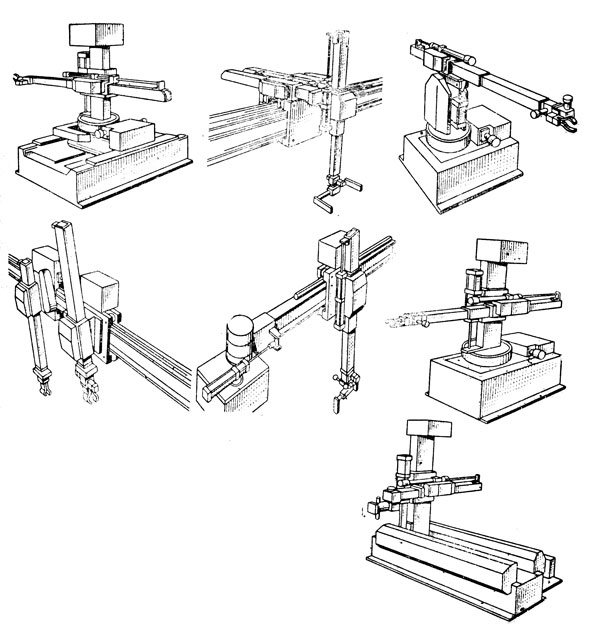
Рис. 15. Блочно-модульные промышленные роботы японской фирмы 'Мицубиси'
Использование этих модульных блоков позволяет создать универсальные и специализированные, простые и сложные промышленные роботы с разными техническими данными и конструктивным исполнением - напольные и подвесные с одним и двумя рычажно-захватными устройствами и т. д. (рис. 15). На базе этих модульно-блочных конструкций выпускается ряд промышленных роботов с гидравлическим и пневматическим приводами грузоподъемностью от 15 до 180 кг, с движением рабочих органов в цилиндрических, ортогональных и полярных системах координат. Они предназначены для выполнения технологических операций (точечной сварки, окраски и т. п.) и обслуживания различного оборудования - машин для литья под давлением, штамповочных прессов, металлорежущих станков, оборудования для изготовления деталей из пластмасс, термических печей и др. Ниже приведена техническая характеристика блочно-модульных роботов фирмы "Мицубиси" (с движением рабочих органов в цилиндрических системах координат).
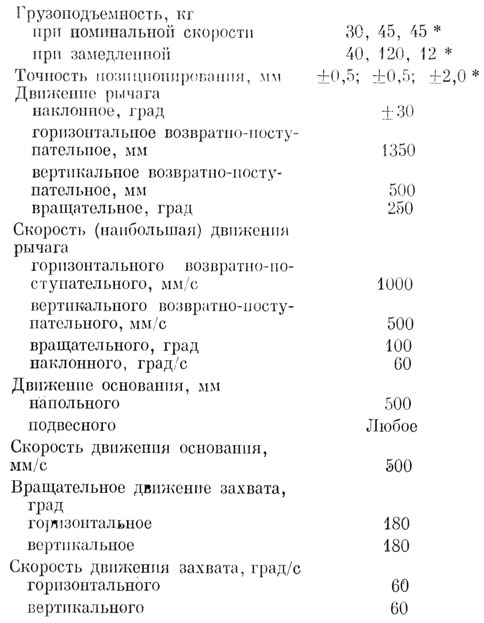
* (Соответственно доя приводов с двухпозиционным пневмо- и гидроуправлением и гидравлическим сервоуправлениём).
В Болгарии выпускаются подвесные передвижные блочно-модульные конструкции роботов (типа "Пирин") грузоподъемностью до 40 кг, имеющие гидравлический привод и два рычажно-захватных устройства, предназначенных для обслуживания металлорежущих станков, встроенных в автоматические линии, для обработки деталей типа тел вращения. Роботы выпускаются четырех типоразмеров с неповоротными и поворотными захватами, позволяющими изменять положение деталей в пространстве на 180°, с наклоном или без наклона рычажно-захватных устройств.
Из пяти основных унифицированных блоков собираются передвижные роботы фирмы "Индастриз роботе Роли" грузоподъемностью от 0,2 до 3 кг с пневматическим приводом. Они состоят из тележки с горизонтальным перемещением до 200 мм и поворотного основания (вращающегося вокруг вертикальной оси па угол до 180°), на котором смонтирована стойка (колонна), осуществляющая вертикальное возвратно-поступательное движение на 100 мм рычажно-захватного устройства. Последнее способно также совершать горизонтальное возвратное перемещение на 300 мм. Для ограничения вертикального и горизонтального перемещений используются регулируемые упоры, а для торможения в конце хода - гидравлические демпферы. На рычаге смонтировано устройство, в котором закрепляется захват (или вакуумные присоски, электромагниты, либо инструменты для выполнения технологических операций и т. п.), осуществляющее его поворот на угол 180°.
В мини-роботах фирмы "Метло-Фер" используются блочно-модульные устройства механической части: рычажно-захватное, совершающее горизонтальное перемещение до 200 мм, колонна, осуществляющая вертикальное перемещение рычага до 50 мм, механический захват (который может быть заменен электромагнитным или вакуумными присосками) и блоки электромагнитных золотников. Вертикальное и горизонтальное перемещения ограничиваются регулируемыми упорами, а электронная система управления дает возможность изменять последовательность движения рычажно-захватного устройства.
Из блочно-модульных элементов построены механическая часть и системы управления напольных и подвесных роботов фирмы "Фовер" (ФРГ). Роботы предназначены для загрузочно-разгрузочных работ, складирования, а также осуществления таких технологических операций (при оснащении соответствующим инструментом), как зачистка шлифовальным кругом поверхностей, дуговая и точечная сварки и т. п., их грузоподъемность до 80 кг, они имеют до пяти степеней свободы, оснащены системой управления от ЭВМ посредством проблемно-ориентированного языка программирования.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'