4.2. Системы УЧПУ для управления ПР
Для управления ПР применяют: серийные станочные УЧПУ; специализированные устройства управления ПР; "унифицированные устройства управления ПР.
Серийные станочные УЧПУ (например, моделей Н22-1М, Н33-1М, Контур-ЗМИ и др.) применяют ?для управления ПР и станком в режиме разделения времени, автономного управления ПР, управления комплексом "станок-ПР" с возможностью одновременной отработки УП (в последнем случае используют многокооординатные УЧПУ).
Использование таких УЧПУ для управления ПР имеет следующие недостатки: усложняются процессы программирования работы ПР, станка и комплекса "станок-ПР" в целом (поскольку УП станка и ПР объединены); начало функционирования ПР и станка не совпадает по времени (поскольку число управляемых координат серийных УЧПУ меньше суммы чисел координат ПР и станка); невозможно обеспечить программирование ПР методом обучения; станочные УЧПУ, предназначенные для управления технологическим оборудованием, во многом не удовлетворяют специфическим требованиям, предъявляемым к ПР. Поэтому применение серийных станочных УЧПУ для управления ПР является в большинстве случаев вынужденным.
Специализированные устройства управления ПР проектируются, как правило, разработчиками ПР и в значительно большей степени соответствуют предъявляемым к ПР требованиям.
Унифицированные системы управления ПР выпускаются серийно. К их числу относится гамма устройств различного функционального назначения типа УЦМ, УПМ, УКМ, УПКМ, а также гамма устройств управления блочно-модульного типа серии ЕСМ.
Позиционные цикловые устройства программного управления типа УЦМ моделей УЦМ-10, УЦМ-20, У2М-30 и УЦМ-663 различаются в основном числом выходных сигналов и вспомогательных команд. Такими устройствами, предназначенными для управления ПР, обслуживающих кузнечно-прессовое оборудование, литейные машины, линии гальванопокрытий и металлорежущие станки в условиях массового и крупносерийного производства, оснащают роботы с ограниченными манипуляционными и функциональными возможностями, имеющими небольшое число точек позиционирования по каждой степени подвижности. Командный сигнал системы управления представляет собой потенциал определенной полярности, который появляется на соответствующей выходной шине. Длительность командного сигнала может быть установлена по времени в системе управления или по ответу от конечного выключателя, расположенного на соответствующем рабочем органе ПР.
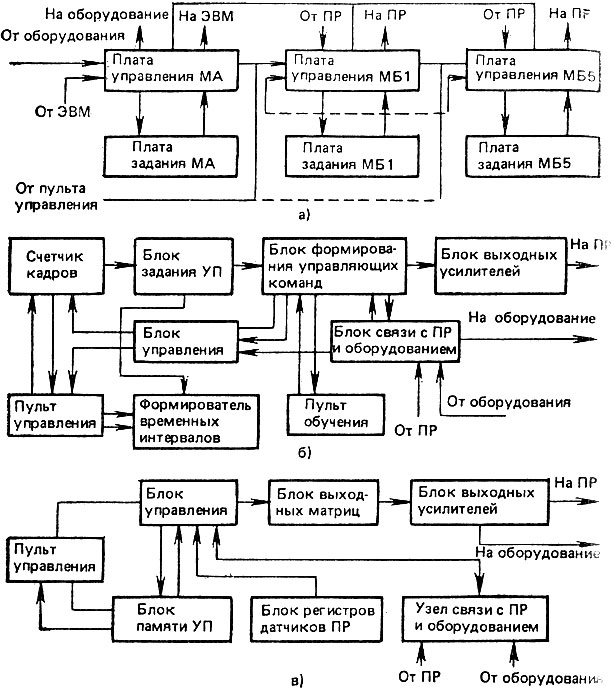
Рис. 4.1. Структурная схема устройств циклового программного управления моделей УЦМ-10 (а), УЦМ-20 (б) и УЦМ-663 (в)
Структурные схемы устройств типа УЦМ показаны на рис. 4.1, а их техническая характеристика приведена в табл. 4.1.
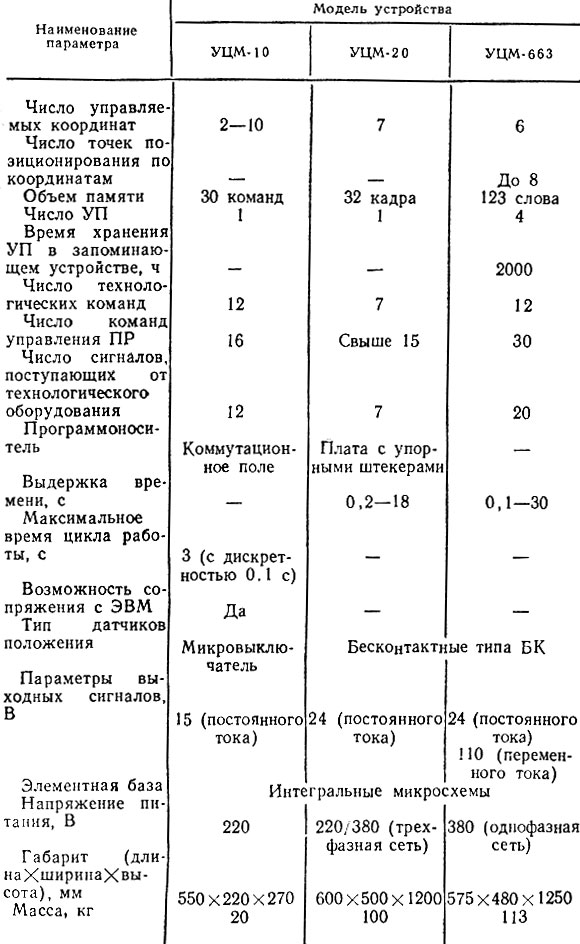
Таблица 4.1. Техническая характеристика унифицированных устройств управления типа УЦМ
Устройство мод. УЦМ-10 (см. рис. 4.1, а) состоит из блока управления и блока питания. Блок управления выполнен по модульному принципу и состоит из модуля А (МА), предназначенного для связи с ЭВМ и внешним технологическим оборудованием, и не более пяти модулей Б (МБ1-МБ5), каждый из которых может управлять двумя координатами.
Каждый модуль (А или Б) состоит из платы управления и платы задания УП. В плате управления формируются 30 импульсов, следующих друг за другом с интервалом 0,1 с. Требуемая УП составляется изменением очередности поступления этих импульсов на входы триггеров формирования управляющих команд, размещенных в плате задания УП. Плата управления модуля А синхронизирует работу всего устройства.
Режим работы: автоматический; полуавтоматический; наладочный.
Конструктивно устройство выполнено в виде отдельного блока, состоящего из сварного шкафа, в который устанавливают блок питания и логические платы. Управляемое оборудование подключают с помощью кабельных разъемов, расположенных непосредственно на платах управления модулей.
Устройство мод. УЦМ-20 (см. рис. 4.1,6) построено по принципу синхронного программного автомата с жестким циклом управления. УП набирают в блоке задания программы с помощью диодных штекеров, которые установлены в позиции, соответствующие управляющим командам, выдаваемым на ПР и технологическое оборудование. В блоке формирования управляющих команд определяется их последовательность на основании информации, поступающей из блока задания УП и блока управления.
Управляющие команды на перемещение рабочих органов ПР выдаются через блок выходных усилителей. Управляющие команды на обслуживаемое оборудование, прием информации, поступающей с него, и с датчиков положения подвижных органов ПР, выдаются через блок связи с ПР и технологическим оборудованием.
Режим работы (автоматический, полуавтоматический, наладочный) и длительность сигналов управляющих команд задаются с пульта управления.
Пульт обучения обеспечивает ручное управление подвижными органами ПР и контроль состояния их датчиков положения. С помощью установки временных интервалов можно сформировать выдержки времени между отработкой отдельных кадров УП. Отработка каждого кадра УП фиксируется счетчиком кадров с последующей выдачей управляющих команд очередного кадра рабочего цикла УП.
Устройство имеет принудительное охлаждение. Для установки блоков микроэлектроники, автоматики и писания в металлическом шкафу имеются направляющие элементы крепления. Блоки микроэлектроники расположены на платах с двусторонним печатным монтажом. С выносным пультом обучения устройство соединено через разъемы кабелем длиной 3 м.
Устройство мод. УЦМ-30, являющееся модификацией устройства мод. УЦМ-20, отличается от последнего Наличием оперативной памяти, в результате чего отпадает необходимость в диодных штекерах. Устройство обеспечивает сохранность УП при отключении питания. Устройство мод. УЦМ-663 (см. рис. 4.1, в) построено Ио принципу синхронного программного автомата с жестким циклом управления. УП хранится в блоке памяти УП и сохраняется при отключении питания. По заданной УП в блоке управления обрабатывается информация. Затем через блоки выходных матриц и выходных усилителей управляющие команды выдаются на ПР и технологическое оборудование. Управляющие команды блока управления формируются на основе информации, поступающей из следующих блоков: памяти УП; связи с ПР и технологическим оборудованием; накопителя информации датчиков ПР.
Блок выходных усилителей, построенный на тиристорах, обеспечивает, с одной стороны, выдачу управляющих команд необходимой мощности на ПР и обслуживаемое оборудование, а с другой - полную гальваническую и электромагнитную развязку цепей управление и мощных выходных цепей.
С помощью пульта управления задается режим работы устройства; индицируется обрабатываемый номер и содержание кадра УП; включается-выключается электропитание и гидро- или пневмосеть. С помощью клавиатуры осуществляется набор буквенно-цифровых команд и их запись в ОЗУ в режиме обучения.
Можно программировать следующие функции: позиционирование рабочего органа ПР и управление техно логическим оборудованием (управляющие команды); выдержка времени, совместная отработка управляющих команд, обращение к подпрограмме, конец подпрограммы, управление рабочим циклом, конец рабочего цикла остановка (вспомогательные команды). Устройство обеспечивает также совместную отработку до восьми единичных операций путем организации кадров переменной длины.
Режимы работы устройства: автоматический; цикловой; покадровый; покомандный; ручной; задание программы; регенерация программы.
Устройство может работать по отдельным подпрограммам с вариациями их логической взаимосвязи.
Блоки микроэлектроники выполнены на платах с двусторонним печатным монтажом. Пульт управления расположен сверху металлического шкафа на наклонной панели. С ПР и обслуживаемым оборудованием устройство связано через разъемы с помощью кабелей.
Позиционные УЧПУ типа УПМ моделей УПМ-331, УПМ-552 и УПМ-772 различаются по числу управляемых координат и типу управляемого привода. УЧПУ, предназначенные для управления ПР со значительным числом точек позиционирования по каждой координате, используют для оснащения ПР, обслуживающих оборудование различного технологического назначения; ПР, выполняющих подъемно-транспортные операции; ПР, осуществляющих простейшие сборочные работы; ПР, выполняющих операции контактной точечной сварки.
УЧПУ построены по принципу синхронного микропрограммного автомата с конечным числом состояний и жестким циклом управления. Они унифицированы по структурно-алгоритмическому и конструкторско-технологическому принципам. Вся командная, технологическая и геометрическая информация (задаваемая в абсолютных величинах) с пульта обучения и пульта управления записывается в ОЗУ, откуда она может быть переписана для длительного хранения на магнитную ленту кассетного накопителя. Технологическая информация включает до шести-десяти управляющих команд.
Операционно-логический блок совместно с микропрограммным автоматом обеспечивает взаимодействие всех блоков УЧПУ и выполняет функции центрального управления и логической обработки информации.
Прием и выдача командной и технологической информации на ПР и обслуживаемое им технологическое оборудование осуществляются блоком ввода-вывода технологической информации.
С пульта управления устройств возможно задание следующих режимов работы: "Программа" (автоматическая отработка УП); "Поиск кадра"; "Ручное управление"; "Программирование" ("Обучение"); "Контроль программы"; "Разметка магнитной ленты"; "Разметка зоны"; "Начальная установка".
Отработка программы осуществляется при наличии команд безусловного и условного (по сигналам от управляемых объектов) перехода, число которых может выть до 32. Выбор требуемой УП осуществляется соответствующим сигналом от управляемых объектов или с пульта управления.
Программирование методом обучения производится на малых скоростях движения ПР и представляет собой последовательное занесение в ОЗУ информации отдельных кадров рабочей программы. Перед обучением целесообразно составить рабочую программу функционирования ПР и записать ее на карту программирования.
Управление степенями подвижности ПР и задание скорости перемещения при обучении осуществляются с пульта обучения; технологическая и вспомогательная информация (в том числе условия выполнения УП, скорости рабочего перемещения по степеням подвижности параметров тары и т. п.) набирается на пульте управления УЧПУ. Процесс обучения отдельным кадрам УП состоит в наборе на пульте управления технологической и вспомогательной информации, требуемой в i-м кадре рабочей программы и в соответствующем пространственном перемещении исполнительного органа (захвата) ПР. Затем нажатием кнопки "Запись кадра", расположенной на пульте обучения, вся геометрическая, технологическая и вспомогательная информация заносится в соответствующие ячейки ОЗУ.
Конструктивно устройство состоит из шкафа и пульта обучения, соединенного со шкафом (через разъем) экранированным кабелем длиной до 20 м. УЧПУ снабжены принудительным воздушным охлаждением.
Блоки микроэлектроники выполнены на платах с двусторонним печатным монтажом. Применение интегральных кремниевых микросхем обеспечивает высокие надежность и помехоустойчивость УЧПУ.
Устройства обеспечивают цифровую индикацию и световую сигнализацию как режимов работы, так и возможных отказов.
Условия работы: закрытое отапливаемое помещение; окружающая среда не должна содержать агрессивных паров и газов в концентрациях, повреждающих металл и изоляцию; температура от +5 до +40°С.
Техническая характеристика УЧПУ типа УПМ приведена в табл. 4.2.
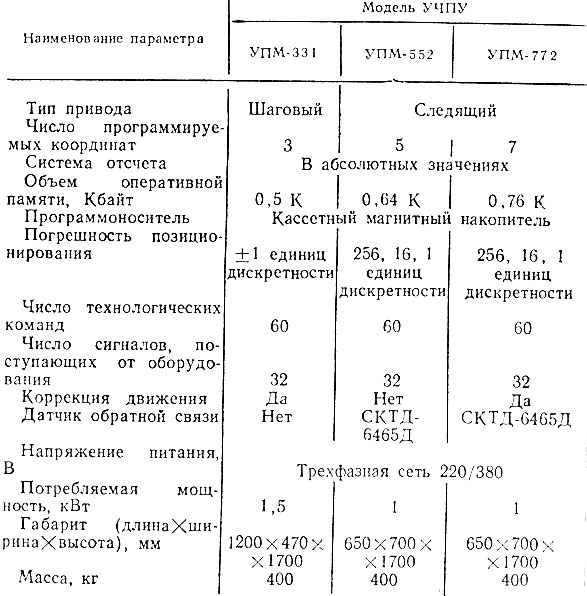
Таблица 4.2. Техническая характеристика унифицированных УЧПУ типа УПМ
УЧПУ мод. УПМ-331 (рис. 4.2,а) предназначено для управления ПР с шаговым приводом разомкнутого типа и числом программируемых координат до трех. УЧПУ реализует управление загрузкой-выгрузкой деталей из специальной ориентирующей тары (ложементов). Число ложементов-8, величина коррекции шага - три десятичных разряда.
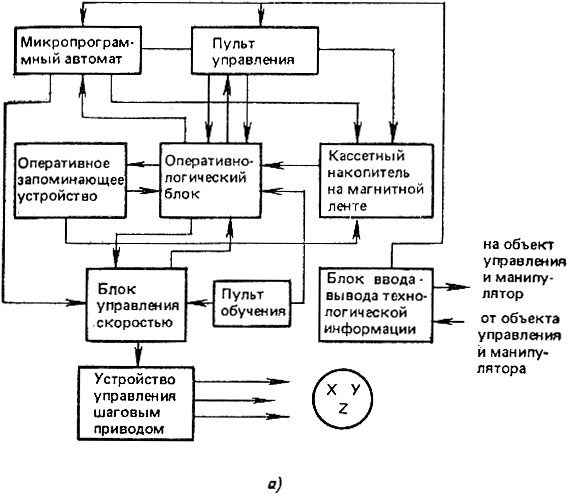
Рис. 4.2. Структурная схема УЧПУ модели УПМ-331 (а)
УЧПУ мод. УПМ-552 (рис. 4.2, б) предназначено для управления ПР с пятью программируемыми координатами и следящими приводами.
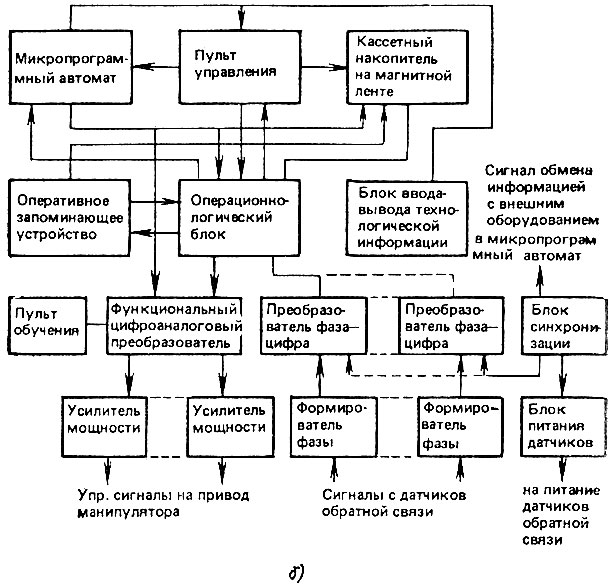
Рис. 4.2. Структурная схема УЧПУ моделей УПМ-552, УПМ-772 (б)
Управляющие сигналы на перемещение манипулятора в режиме разделения времени выдаются через усилители мощности с функционального цифроаналогового преобразователя в виде постоянного напряжения, изменяющегося в диапазоне ± 10B. С двухотсчетных фазовых датчиков обратной связи в УЧПУ поступает информация о текущем положении подвижных органов манипулятора, С помощью блоков формирователя фазы и преобразователей "фаза-цифра" эта информация преобразуется в цифровую форму и для дальнейшей обработки подается в операционно-логический блок. Питание датчиков обратной связи осуществляется опорным напряжением, формируемым блоком питания датчиков от входного сигнала блока синхронизации. В качестве датчиков обратной связи используются двухотсчетные синусно-косинусные вращающиеся трансформаторы типа СКТБ-6465Д.
УЧПУ мод. УПМ-772, предназначенное для управления ПР с семью программируемыми координатами и следящими приводами, работает по тому же принципу, что и УЧПУ мод. УПМ-552, и отличается от последнего числом управляемых координат. Кроме того, УЧПУ мод. УПМ-772 реализует управление загрузкой-выгрузкой деталей из ложементов в декартовой системе координат. Число ложементов-8, величина коррекции шага - три десятичных разряда.
Контурные УЧПУ типа УКМ моделей УКМ-552 и УКМ-772 предназначены для управления ПР, исполнительные органы которых выполняют сложные пространственные перемещения по заданной траектории. Такие перемещения необходимы при окраске, дуговой сварке, а также при сложных сборочных операциях. Эти УЧПУ различаются числом управляемых координат.
Вычислитель УЧПУ типа УКМ реализован на базе микроЭВМ "Электроника-60", программоноситель - кассетный накопитель, содержащий магнитную ленту.
УЧПУ могут принимать сигналы от органов управления ПР, измерительных датчиков ПР, контакторов технологического оборудования, инструментальных механизмов, а также от аварийных конечных выключателей. УЧПУ обеспечивает установку рабочих органов ПР в позицию, соответствующую началу рабочей программы.
При отработке УП могут использоваться команды безусловных и условных переходов, Выбор требуемой УП осуществляется по соответствующим сигналам от объекта управления число сигналов-4 (для УЧПУ мод. УКМ-552) и 5 (для УЧПУ мод. УКМ-772) или от пульта управления.
Конструктивно УЧПУ выполнено в виде унифицированной стойки управления. УЧПУ с ПР и технологическим оборудованием, соединено кабелем длиной до 20 м. Пульт управления встроен в стойку управления и является его неотъемлемой частью. Блоки микроэлектроники выполнены на платах с двусторонним печатным монтажом. Элементно-конструктивная база - интегральные микросхемы серии К155 в сочетании с дискретными элементами. Габарит УЧПУ 170×470×600 мм, масса 300 кг. УЧПУ имеет электрическую защиту, обеспечивающую отключение питания при коротких замыканиях. Условия работы: закрытое отапливаемое помещение" окружающая среда не должна содержать агрессивных паров и газов в концентрациях, повреждающих металл и изоляцию.
Техническая характеристика УЧПУ типа УКМ приведена в табл. 4.3.
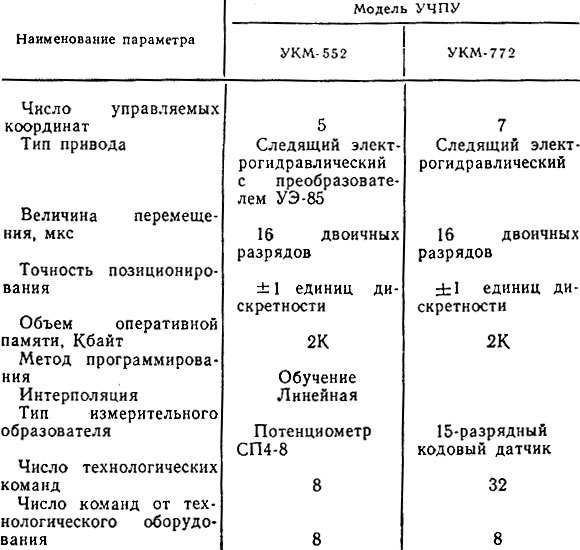
Таблица 4.3. Техническая характеристика УЧПУ типа УКМ
Структурная схема УЧПУ типа УКМ показана на рис. 4.3.
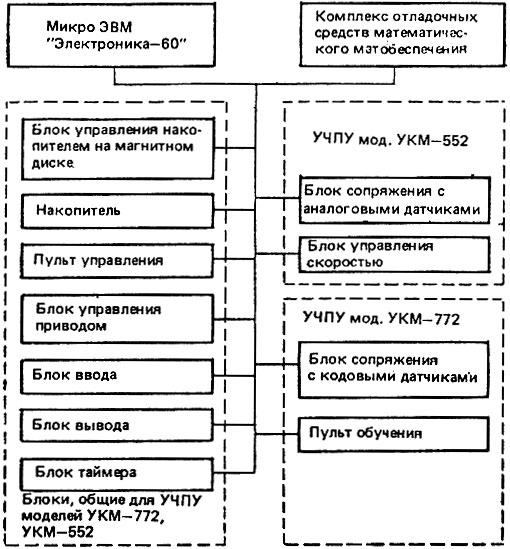
Рис. 4.3. Структурная схема УЧПУ моделей УКМ-552 и УКМ-772
УЧПУ мод. УКМ-552 (см. рис. 4.3) предназначено для управления ПР и окрасочным оборудованием при окраске объемных изделий (с поперечным сечением не более 1000×1200 мм) в типовых окрасочных камерах.
УЧПУ обеспечивает работу с заданием скорости воспроизведения УП от внутреннего генератора и с заданием скорости воспроизведения УП от датчика скорости конвейера.
Режим работы: "Программа" - воспроизведение УП в автоматическом режиме; "Обучение" - ручное управление с записью УП в память УЧПУ; "Контроль" - профилактические работы, связанные с отработкой математического обеспечения; "Ручной" - управление от органов, расположенных на рукоятке обучения манипулятора.
Функции УЧПУ: контроль работы вычислителя, программоносителя, блока измерительной системы и управления приводом, исходного положения манипулятора; превышение длительности времени обучения; цифровая индикация номера зоны (два десятичных разряда) и световая сигнализация работы; отработка технологических команд; установки подвижных органов манипулятора в исходное положение; выбор УП.
УЧПУ мод. УКМ-772 (см. рис. 4.3) предназначено для управления ПР и сварочным оборудованием при дуговой сварке.
Режим работы: "Программа" - обработка геометрической информации по УП в автоматическом режиме (со сваркой или без сварки); "Обучение" - программирование геометрической и технологической информации без Отработки ее в процессе ручного управления; "Ручной" - перемещение подвижных органов ПР с управлением от пульта обучения и работа сварочного оборудования с управлением от пульта, установленного на этом оборудовании; "Контроль" - профилактические работы, связанные с отработкой математического обеспечения.
УЧПУ обеспечивает: световую сигнализацию о выполнении работы, об отработке технологических команд, о наличии сбоя, об установке ПР в исходное положение; цифровую индикацию номера зоны на пультах управления и обучения УЧПУ (четыре десятичных разряда). Пульт обучения УЧПУ выполнен в виде конструктивно-законченного узла и подсоединяется к УЧПУ (через разъем) посредством экранированного кабеля длиной до 20 м.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'