5. Надежность логической системы привода
В заключение остановимся на оценке надежности невосстанавливаемой логической системы привода, особенностью которой является то, что она предназначена для выполнения относительно редких кратковременных операций. В этой системе лишь небольшая часть отказов элементов немедленно проявляется как нарушение работы всей системы. Большинство отказов элементов вызывает нарушение работы системы лишь при возникновении определенной операции, для выполнения которой требуется правильная работа данного элемента.
Назовем отказом системы такое событие, когда она либо самопроизвольно выполняет какие-либо операции при отсутствии необходимости в них, либо не выполняет необходимых операций. Речь идет о ложных срабатываниях или об отказах операций.
При оценке надежности необходимо учесть различную вероятность появления различных входных наборов сигналов; временную избыточность системы, связанную с тем, что отказы элементов не приводят к отказу системы на некоторых входных наборах.
Основными параметрами, определяющими надежность, служат:
- суммарная интенсивность отказов всех элементов системы
 (
( - среднее время между отказами);
- среднее время между отказами);
- средний параметр потока операций системы
 - среднее время между операциями).
- среднее время между операциями).
Процесс функционирования исправной системы может быть представлен направленным графом технологических состояний. Вершины этого графа, обозначаемые кружками, соответствуют различным технологическим состояниям, а ребра, обозначаемые стрелками,- различным операциям.
Условимся, что учитываются стационарность процесса, отсутствие последействия и ординарность.
Вероятностные характеристики функционирования исправной системы определяются заданием квадратной матрицы параметров операций

где n - общее число технологических состояний.
Суммарный параметр перехода из i-го состояния обозначим 

Плотность вероятности для времени пребывания в i-м состоянии 
Последствия отказа некоторого k-го элемента системы (при условии, что все остальные элементы исправны) можно задать указанием тех состояний, в которых этот отказ приводит к ложному срабатыванию, и тех операций, которые не выполняются из-за отказа k-го элемента. Это можно сделать заданием вектора-строки  и квадратной матрицы
и квадратной матрицы 
Здесь  если отказ k-го элемента приводит к ложному срабатыванию системы в i-м состоянии, и
если отказ k-го элемента приводит к ложному срабатыванию системы в i-м состоянии, и  - в противном случае. Аналогичные значения принимают
- в противном случае. Аналогичные значения принимают  по отношению к невыполнению операции перехода из i-го в j-е технологическое состояние при отказе k-го элемента. Очевидно, что если не существует операции, непосредственно переводящей систему из i-го в j-е состояние
по отношению к невыполнению операции перехода из i-го в j-е технологическое состояние при отказе k-го элемента. Очевидно, что если не существует операции, непосредственно переводящей систему из i-го в j-е состояние  то можно положить
то можно положить  Также, если
Также, если  для всех j, для которых
для всех j, для которых  если
если 
Все элементы нерезервированной системы с одинаковыми H и A можно объединить в один условный элемент с теми же H и A, просуммировав при этом интенсивности их отказов:
где m - общее число условных элементов.
Рассмотрим систему, состоящую из m условных элементов. Граф ее надежностных состояний имеет  вершины. Если отказ k-го условного элемента не приводит к ложному срабатыванию, система переходит в состояние k-го "скрытого" отказа и продолжает правильно работать. Каждому условному элементу соответствует свое состояние "скрытого" отказа
вершины. Если отказ k-го условного элемента не приводит к ложному срабатыванию, система переходит в состояние k-го "скрытого" отказа и продолжает правильно работать. Каждому условному элементу соответствует свое состояние "скрытого" отказа  В состоянии k-го "скрытого" отказа система остается либо до выполнения операции, при которой отказ k-го условного элемента приводит к отказу системы
В состоянии k-го "скрытого" отказа система остается либо до выполнения операции, при которой отказ k-го условного элемента приводит к отказу системы  либо до отказа другого условного элемента.
либо до отказа другого условного элемента.
Технологические и надежностные состояния отражают две различные стороны функционирования системы. Чтобы их объединить, введем, обобщенные состояния системы:
 - система находится в i-м технологическом состоянии и все ее элементы исправны
- система находится в i-м технологическом состоянии и все ее элементы исправны 
 - система находится в i-м технологическом состоянии со "скрытым" отказом к -го условного элемента
- система находится в i-м технологическом состоянии со "скрытым" отказом к -го условного элемента 

 - система отказала.
- система отказала.
Пусть  - вероятность состояния в момент времени t.
- вероятность состояния в момент времени t.
Вероятность безотказной работы системы
имеем для
откуда

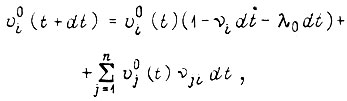
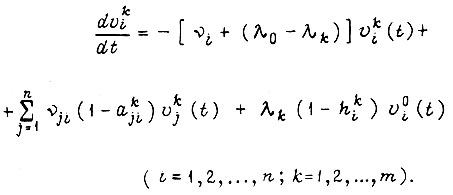
Для состояния
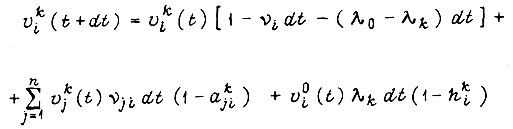
или после предельного перехода
Начальные условия определяются назначением логической системы и порядком ее эксплуатации:

Средняя наработка до первого отказа
После интегрирования дифференциальных уравнений получаем
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'