2.2. Принципы группового управления роботами
Робот, как правило, функционирует не изолированно, а совместно с другим оборудованием, в том числе с другими роботами. Поэтому одной из важнейших характеристик систем управления роботами является оценка возможностей реализации различных вариантов группового управления. На рис. 2.2 приведена классификация систем группового управления роботами. Такое управление может относиться к манипуляторам одного или нескольких роботов.
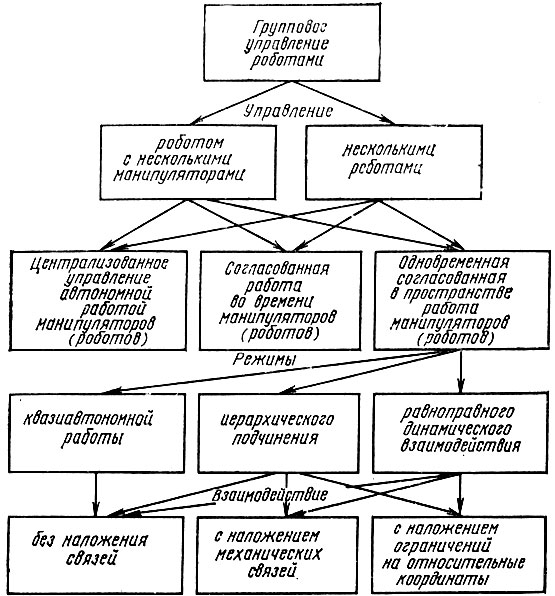
Рис. 2.2. Классификация систем группового управления роботами
Специфика управления манипуляторами одного робота состоит в наличии пространственных и временных ограничений на движения отдельных манипуляторов, которые находятся на одном основании; при этом их рабочие зоны могут пересекаться.
Простейшим вариантом группового управления является управление несколькими автономно действующими манипуляторами или роботами. В этом случае каждый манипулятор совершает автономные, т. е. не связанные в пространстве и во времени с другими манипуляторами, действия. Примером такого управления может быть управление группой роботов, выполняющих различные или одинаковые операции по обслуживанию несвязанных единиц технологического оборудования.
Следующим вариантом группового управления является управление с наложением временных взаимных связей на действия манипуляторов. В простейших случаях эти связи сводятся к установлению оперативной последовательности выполнения каждым манипулятором своей индивидуально заданной операции. Более сложным случаем является полностью синхронизированная параллельная работа манипуляторов.
Дальнейшим усложнением задачи группового управления является совместное выполнение манипуляторами общей работы, требующей взаимной координации их движений в пространстве общей рабочей зоны (например, сборка одного изделия двумя манипуляторами). Возможны несколько режимов такой совместной работы манипуляторов: квазиавтономное управление, иерархическое подчинение и равноправное взаимодействие. В квазиавтономном режиме общее задание разбивается на операции, которые могут выполняться одним из манипуляторов при учете определенных, наложенных на их движения пространственных и временных ограничений, обеспечивающих взаимную развязку движений отдельных манипуляторов.
Режим управления с иерархическим подчинением манипуляторов друг другу заключается в том, что один из манипуляторов является основным, а другие согласуют с ним свои движения во времени и пространстве.
Наиболее высокоорганизованным режимом совместной работы манипуляторов является режим равноправного взаимодействия. Такой режим предполагает при управлении каждым манипулятором в отдельности оперативный учет движений других манипуляторов.
Совместная работа манипуляторов и роботов может происходить как без ограничений на относительные положения рабочих органов, так и с наложением таких ограничений. Операцией с наложенными ограничениями является, например, совместный перенос двумя манипуляторами одного предмета. Такая операция может потребоваться, например, когда грузоподъемность одного робота ниже требуемой для переноса объекта, при работе с крупногабаритными объектами и т. п. Кроме того, необходимо обеспечить согласованное во времени и пространстве перемещение рабочих органов роботов при соблюдении определенных силовых и геометрических ограничений на их относительные координаты.
Ограничения на относительные координаты могут быть механическими или аналитическими в виде задания допустимых отклонений (рассогласований). Примером операции с наложенными механическими ограничениями может быть вставление вала во втулку при условии достаточной прочности изделий. Если в процессе сопряжения может произойти поломка одного из объектов, необходимо накладывать ограничения заданием допустимых отклонений.
Согласование работы отдельных манипуляторов и роботов возможно при следующих вариантах организации управления:
- централизованное управление группой роботов от одного устройства управления;
- децентрализованное групповое управление, когда индивидуальные системы управления роботов перекрестно связаны друг с другом;
- комбинированное управление, являющееся объединением двух первых вариантов.
Все эти варианты могут быть программно реализованы с помощью одной ЭВМ. При централизованном управлении в функции общего устройства управления входит согласование работы индивидуальных устройств управления для организации требуемого взаимодействия отдельных роботов друг с другом и с совместно работающим оборудованием. При выходе из строя такого центрального устройства будет нарушена работа всех роботов.
Децентрализованное управление, реализованное на индивидуальных устройствах управления свободно от этого недостатка, так как отказ одного из этих устройств или линии связи между ними вызовет отказ в работе только одного или некоторой части роботов. Однако в этом случае сложнее изменять алгоритм взаимодействия роботов, так как необходимо изменять структуру имеющихся связей между отдельными устройствами управления.
Наиболее гибкой и надежной является комбинированная система управления, включающая в себя взаимосвязанные центральное и местные устройства управления.
Алгоритмическая часть систем управления роботами может быть реализована на базе специальных устройств управления и стандартных ЭВМ. При создании специальных устройств управления как и при проектировании роботов в целом перспективным является модульный принцип их построения. Как показывает практика, это позволяет почти на порядок сократить сроки создания и серийного выпуска новых марок устройств управления и упростить их эксплуатацию. Кроме того, переход к модульным устройствам управления обеспечивает решение проблемы управления не только самими роботами, но и целыми роботизированными технологическими комплексами. В этом случае системы управления компонуют из унифицированных модулей управления, построенных на базе микропроцессорной техники и стандартных ЭВМ. Кроме того, модульные системы отличаются большой гибкостью в отношении дальнейшей модернизации.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'