2.5. Программное управление роботами от ЭВМ
В настоящее время самое широкое применение в системах управления программными роботами находят мини- и микро-ЭВМ. Это вызвано возрастающей сложностью задач, которые выполняют промышленные роботы. ЭВМ позволяет сделать робототехническую систему более гибкой, легко переналаживаемой и, кроме того, придать ей дополнительные возможности общения человека-оператора с роботом в диалоговом режиме.
При включении ЭВМ в состав робототехнической системы на нее возлагают следующие функции:
- на этапе обучения манипуляционного робота ЭВМ осуществляет интерфейс между человеком-оператором и роботом, выполняет формирование и редактирование программ движения;
- на этапе исполнения сформированной программы ЭВМ выполняет вычисление и генерацию управляющих сигналов на приводы исполнительных механизмов.
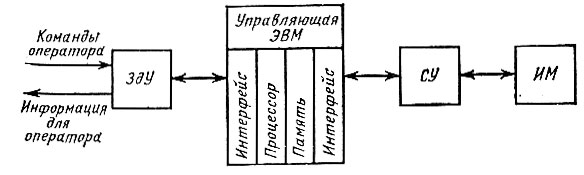
Рис. 2.11. Структурная схема минимальной робототехнической системы: ЗдУ - задающее устройство; СУ - система управления; ИМ - исполнительный механизм
Структурная схема минимальной робототехнической системы с использованием ЭВМ показана на рис. 2.11. При функционировании робототехнической системы человек-оператор с помощью задающего устройства формирует программу движения исполнительного механизма, которая вводится в память ЭВМ. При необходимости программа выдается на исполнение. В качестве задающего устройства может выступать обычный алфавитно-цифровой дисплей (в исследовательских комплексах) или функциональный пульт (в промышленных системах). Такой пульт должен обеспечить человека-оператора всеми необходимыми средствами по обучению и управлению роботом. Функциональный пульт снабжен, как правило, набором кнопок, переключателей, а также индикаторным устройством (строчным дисплеем). Кнопки позволяют оператору вводить команды обучения и управления, переключатели обеспечивают ввод числовых параметров, а индикатор служит как для осуществления диалога оператор-робот на этапе обучения, так и для выдачи различного рода информации об исполнении сформированного задания.
В зависимости от способа обмена данными между приводами исполнительного механизма и управляющей ЭВМ можно выделить четыре способа включения ЭВМ в контур управления манипуляционного робота.
Способ 1. ЭВМ выступает как программное устройство, осуществляющее генерацию управляющих сигналов на приводы исполнительного механизма. Информация о состоянии механизма в ЭВМ не вводится (рис. 2.12, а). Преимущество такой схемы включения ЭВМ - относительная простота математического обеспечения; недостаток - отсутствие контроля за исполнением команд управления со стороны ЭВМ.
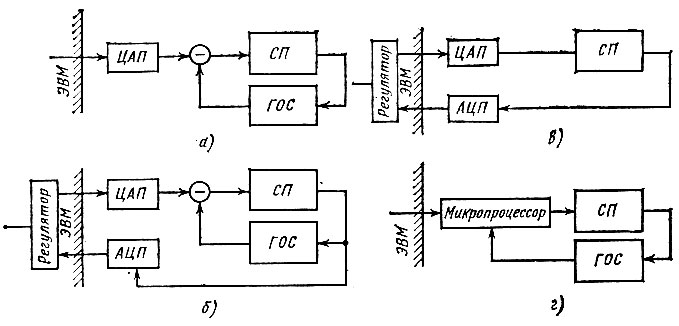
Рис. 2.12. Схема включения ЭВМ в контур управления робототехнической системы: ЦЛП - цифроаналоговый преобразователь; АЦП - аналого-цифровой преобразователь; СП - следящий привод; ГОС - главная обратная связь
Способ 2. Информация о состоянии манипуляционного робота (значения обобщенных координат) в процессе движения вдоль траектории непрерывно вводится в ЭВМ через специальный канал связи АЦП, что позволяет постоянно контролировать и корректировать траектории движения исполнительного механизма (рис. 2.12, б).
Способ 3. ЭВМ является составной частью контура следящей системы привода исполнительного механизма; главная обратная связь замыкается через ЭВМ (рис. 2.12, в). Последняя выполняет активную цифровую коррекцию привода; применение ЭВМ позволяет существенно улучшить динамические и точностные параметры привода.
В этом случае ЭВМ выполняет наибольший объем вычислительных операций по сравнению с первыми двумя схемами, поскольку наряду с расчетами текущих управляющих сигналов она должна параллельно и с высокой точностью осуществлять коррекцию привода.
Способ 4. При необходимости можно разгрузить управляющую ЭВМ, возложив задачи исполнительного уровня на дополнительно включенный в состав привода микропроцессор. Структурная схема системы управления роботом с микропроцессором показана на рис. 2.12, г. Одним из основных преимуществ микропроцессорного управления приводом является его гибкость и универсальность, так как программа коррекции привода размещается в перепрограммируемом запоминающем устройстве микропроцессора и легко может быть изменена.
Рассмотрим теперь общую структуру программного обеспечения управляющей ЭВМ. Система управления программного робота должна обеспечивать формирование, редактирование и отладку программ движения манипуляционного робота, а также исполнение их в пошаговом и автоматическом (непрерывном) режимах. Необходимость реализации этих функций определяет схему программного обеспечения управляющей ЦВМ (рис. 2.13). Общение человека-оператора с роботом осуществляется на специальном языке обучения и управления, который представляет собой совокупность допустимых команд (а в случае задающего устройства типа функционального пульта - набор кнопок) и правил последовательности их ввода человеком-оператором.
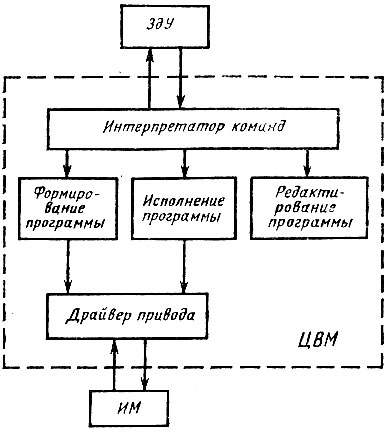
Рис. 2.13. Схема программного обеспечения управляющей ЦВМ (драйвер-программа, обслуживающая устройство, внешнее по отношению к ЦВМ)
В основу организации математического и программного обеспечения системы управления манипуляционным роботом может быть положено представление всей системы обучения и управления как конечного автомата. Этот подход позволяет:
- получить хорошее программное обеспечение робототехнического комплекса;
- обеспечить эффективную реализацию языка обучения и управления;
- эффективно и экономно (в отношении быстродействия и объема занимаемой памяти) строить программное обеспечение.
Формальное описание конечного автомата состоит в следующем. Конечный автомат K - это пятерка  , где S - конечное множество состояний автомата;
, где S - конечное множество состояний автомата;  - начальное состояние; T - конечный входной алфавит; P- отображение множества
- начальное состояние; T - конечный входной алфавит; P- отображение множества  в S, определяющее правила перехода автомата из одного состояния в другое, как функцию текущего состояния и выходного символа;
в S, определяющее правила перехода автомата из одного состояния в другое, как функцию текущего состояния и выходного символа;  - множество заключительных состояний автомата [9, 69].
- множество заключительных состояний автомата [9, 69].
В качестве иллюстрации рассмотрим систему позиционного управления роботом, содержащую функциональный пульт, позволяющий вводить следующие команды: АВТОМАТ (а), ШАГ (ш), ОБУЧЕНИЕ (о), ВВОД (в), ЗАПОМНИТЬ (з), СТОП (с). Пусть каждая точка позиционирования захватного устройства исполнительного механизма характеризуется набором чисел, однозначно определяющих конфигурацию манипулятора (например, набором шарнирных переменных), а также скоростью перемещения захватного устройства к этой точке. Такой набор данных будем называть кадром программы.
Работа системы с позиции пользователя заключается в следующем. Нажатие кнопки (или выдача команды) "Обучение" переводит систему в режим обучения, в котором человек-оператор формирует последовательность кадров программы, выставляя некоторым образом захватное устройство манипулятора в требуемые точки позиционирования и фиксируя достигнутые состояния (кнопка "Запомнить"). Значения скорости перемещения захватного устройства при отработке траектории вводятся с помощью переключателей и кнопки "Ввод". Кнопки "Шаг" и "Автомат" переводят систему в режим пошагового и непрерывного исполнения сформированной программы. Кнопка "Стоп" вызывает немедленное прекращение функционирования системы.
Применительно к рассмотренной системе атрибуты конечного автомата выглядят следующим образом:

Правила перехода P можно представить в виде графа (рис. 2.14, а). Поскольку цепочки входных символов не имеют признака окончания, все состояния являются допустимыми, т. е. 
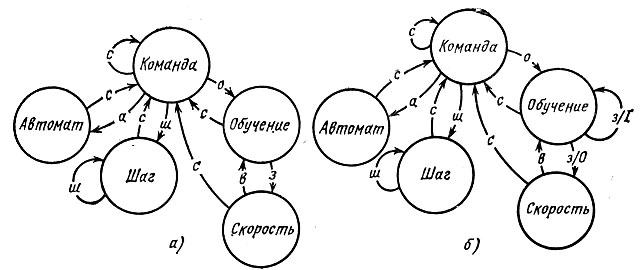
Рис. 2.14. Графы переходов автоматов: а - традиционного; б - расширенного
Не для всех прикладных задач удобно использование аппарата конечных автоматов. Для примера рассмотрим ситуацию, когда один из параметров, определяющих точку позиционирования (например, 56 скорость), остается неизменным для всех точек формируемого задания, но может меняться от задания к заданию. В таких случаях чрезвычайно удобна система умолчаний, которая позволяет вводить один и тот же параметр для всех точек (например, задавать параметр в началу режима обучения). Для реализации аппарата умолчаний в описаний конечного автомата вводится вектор переключателей  с целочисленными компонентами. Тогда расширенный конечный автомат
с целочисленными компонентами. Тогда расширенный конечный автомат  - это шестерка
- это шестерка  где S - конечное множество состояний автомата;
где S - конечное множество состояний автомата;  - начальное состояние; П - вектор переключателей с целочисленными компонентами; T - конечный входной алфавит; P - правила перехода, отображение множества
- начальное состояние; П - вектор переключателей с целочисленными компонентами; T - конечный входной алфавит; P - правила перехода, отображение множества  в s;
в s; 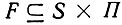 - множество заключительных состояний автомата.
- множество заключительных состояний автомата.
Пусть в рассмотренной выше пультовой системе переключатель, связанный с заданием скорости, принимает два значения

Тогда атрибуты расширенного конечного автомата:
а соответствующий граф переходов P показан на рис. 2.14, б.
При разработке программного обеспечения системы управления манипуляционным роботом особое место занимают вопросы организации структуры данных. Это связано как с требованиями к объему занимаемой памяти, так и с необходимостью обеспечения высокого быстродействия системы, т. е. быстрого доступа к данным со стороны системных программ с целью записи, чтения, редактирования и т. д.
В устройствах управления промышленных роботов (например, УКМ-772) принята организация структуры данных, подобная используемой в станках с числовым программным управлением. Набор управляющих данных представляет собой последовательность кадров, которые отрабатываются один за другим. Кадр программы может содержать как основную (технологическую), так и вспомогательную (управляющую) числовую информацию. К технологической информации относятся данные о величинах перемещений (абсолютных и относительных), о скоростях перемещений и т. д., связанные с одним кадром программы; управляющая информация определяет режимы движения, вид траектории и т. д. для текущего и последующих кадров программы. В некоторых устройствах управления допускается организация подпрограмм, т. е. определенных последовательностей кадров, на которые может передаваться управление из различных мест основной программы.
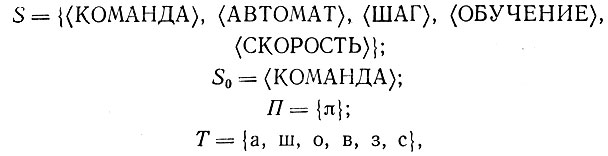
Еще один подход к организации структуры данных состоит в разделении данных, характеризующих точки позиционирования исполнительного механизма и данных о последовательности прохождения этих точек. Такое разделение обеспечивает быстрое и простое обучение манипуляционного робота, а также значительную экономию памяти ЭВМ, так как в этом случае не требуется запоминать все последовательные точки траектории в порядке их отработки механизмом (многие из которых повторяются), а достаточно обучить робот лишь различным точкам позиционирования и заполнить соответствующим образом массив последовательности с учетом совпадающих точек. Подобная структура данных приведена на рис. 2.15.
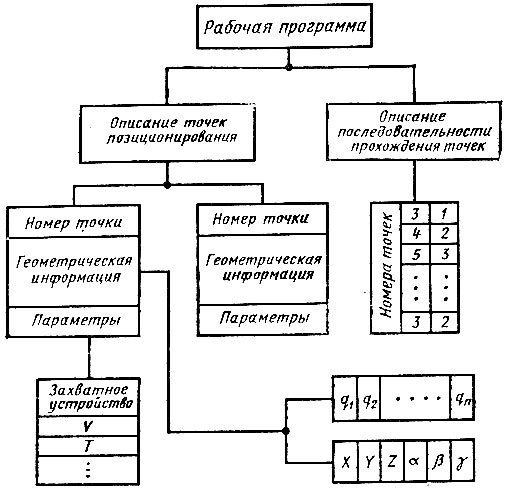
Рис. 2.15. Структура данных в системе программного обеспечения
Особенностью функционирования программного обеспечения робототехнической системы является мультизадачное исполнения программ движения. Работа системы управления представляет собой взаимодействие различных вычислительных процессов, которые должны развиваться параллельно. Такими процессами могут быть:
- вычисление координат точек позиционирования;
- интерполяция;
- вычисление и выдача управляющих сигналов на приводы исполнительного механизма.
Эти процессы представляют собой законченные вычислительные процедуры и взаимодействуют друг с другом только на уровне обмена данными. Поскольку не всегда удается обеспечить синхронизацию различных процессов (например, из-за несовпадения по быстродействию используемых устройств), данные, передаваемые от одной задачи к другой, накапливаются (линейный список типа FIFO) и запрашиваются задачей по мере необходимости (рис. 2.16).
Рис. 2.16. Взаимодействие процессов в системе программного обеспечения
Изложенные положения об организации систем управления программными роботами с использованием микро-ЭВМ нашли свое отражение в создании на кафедре "Автоматические системы" МВТУ им. Н. Э. Баумана промышленной робототехнической системы минимальной конфигурации. Система управления (рис. 2.17) реализована на базе микро-ЭВМ "Электроника-60" и включает функциональный пульт, содержащий 16 кнопок (т. е. человек-оператор может ввести 16 команд), три 10-позиционных переключателя для ввода данных в диапазоне 0-999, а также строчный дисплей, позволяющий выводить строку символов (не более 16). Исполнительным механизмом системы является манипуляционный робот ПРАМЭ-5-МВТУ. Пультовая система управления движением манипуляционного робота позволяет формировать программу движения (режим обучения), редактировать программу и исполнять программу движения в пошаговом и автоматическом режимах.
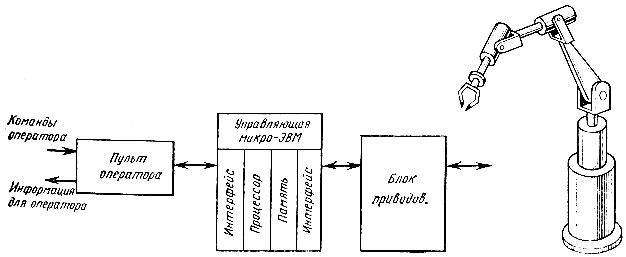
Рис. 2.17. Минимальная конфигурация промышленной робототехнической системы
Программное обеспечение системы организовано с использованием теории конечных автоматов, развитой понятием расширенного конечного автомата.
Данные, характеризующие точки позиционирования и последовательность, в которой они проходятся исполнительным механизмом, разделены. Для записи информации о последовательности прохождения точек позиционирования разработан "скобочный" метод кодирования последовательности. Его можно проиллюстрировать следующим примером. Пусть манипулятор должен обойти последовательно точки P2, P3, P4, P3, P4, P3, P4, P1. Эквивалентная "скобочная" запись имеет вид P2, (P3, P4)3, P1. Скобки в записи ограничивают циклически повторяемую последовательность, при этом первое число после правой (закрывающей) скобки означает число повторов цикла (0 - означает бесконечный цикл).
На этапе исполнения предварительно сформированной программы движения ЭВМ выполняет планирование траектории между заданными узловыми точками (при контурном управлении); при необходимости решает обратную кинематическую задачу; выполняет интерполяцию управляющих сигналов (линейную или сплайн-функциями) и формирует и выдает управление на приводы исполнительного механизма.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'