4.2. Манипуляторы и роботы с командным управлением
Простейшим способом дистанционного управления движением исполнительного устройства является независимое, как правило, последовательное включение приводов каждой из его степеней подвижности. Включение осуществляется с пульта оператора (стационарного или переносного) при помощи кнопок или тумблеров. При этом движение в одной из степеней подвижности манипуляционного устройства осуществляется за счет подачи управляющего сигнала на вход соответствующего исполнительного привода, замкнутого по скорости.
Очевидно, что изменение уровня управляющего сигнала (как правило, дискретное) приводит к изменению и скорости движения соответствующего звена манипулятора. Полярность сигнала управления определяет направление движения. Возможно и одновременное включение приводов по нескольким степеням подвижности, что позволяет осуществить более сложную траекторию движения манипуляционного устройства. Подобное управление манипулятором, выполняемое человеком-оператором, получило наименование командного управления. При таком управлении оператор имеет возможность организовать и проконтролировать движение в нужной степени подвижности манипулятора, исключив движение остальных. Подобный способ управления использовался еще при создании манипуляторов, имеющих незначительное число степеней подвижности и особенно работающих в прямоугольной системе координат. Однако, данный способ оказался наиболее надежным и для дистанционного обучения движению промышленных роботов. Поэтому большинство современных промышленных роботов оснащают специальным выносным кнопочным пультом дистанционного управления.
На рис. 4.1 изображен выносной пульт дистанционного управления промышленного робота "Браво" (Bravo, Италия). Пультами дистанционного управления и обучения оснащены также и отечественные промышленные роботы "Циклон-5", РПМ-25 и др.
Рис. 4.1. Выносной пульт дистанционного управления промышленного робота
Введение команд с помощью пульта позволяет оператору формировать требуемую траекторию движения при непосредственном ручном управлении манипулятором без использования сложных электронных схем. При этом все точки позиционирования захвата манипулятора, требующие воспроизведения в автоматическом режиме, запоминаются в специальном блоке памяти или с помощью ЭВМ.
Оператор, используя переносной кнопочный пульт управления, может непосредственно наблюдать за движением захватного устройства манипулятора в рабочей зоне и его взаимодействием с объектами. Это обеспечивает высокую точность позиционирования при быстром вводе и фиксации координат в системе автоматического управления.
Подобное командное управление оказывается необходимым для обеспечения движения робота в ряде критических и особенно аварийных ситуаций. Действительно, появление непредвиденной обстановки, характеризующейся заклиниванием деталей, поломкой механизма и т. п., и невозможность действий робота в автоматическом режиме с программным управлением, требуют перехода на ручное управление. Именно ручное командное управление позволяет обеспечить вывод манипулятора из сложной ситуации и введение его в положение, являющееся исходным для дальнейшего программного движения в автоматическом режиме.
Пульты дистанционного управления и обучения промышленных роботов оформляются в удобном для оператора виде и имеют условные обозначения движений захвата манипулятора "Вверх", "Вниз", ("Вправо", "Влево" и т. п.).
Удобству работы оператора способствует наличие сигнальной индикации о включении соответствующих приводов робота.
Оснащение промышленных роботов пультами дистанционного управления и обучения значительно расширяет функциональные возможности робота, упрощает процессы ввода информации о рабочем процессе в блок памяти и обеспечивает возможность выполнения заранее запрограммированных операций. Автоматические манипуляторы с программным управлением, оснащенные дополнительными пультами ручного командного управления, могут быть названы промышленными роботами с дистанционно-автоматическим управлением.
Пульты командного управления движением манипулятора находят также применение при создании объектов, требующих максимального упрощения аппаратурной реализации и повышенной надежности. Так, целый ряд обитаемых подводных аппаратов оснащен манипуляционными устройствами с командным управлением от специальных пультов, имеющих кнопочную систему включения исполнительных приводов.
Однако использование принципов командного управления манипулятором обитаемых аппаратов требует максимального повышения удобства работы человека-оператора. Сложность ориентации в быстро изменяющейся обстановке рабочего пространства манипулятора приводит к необходимости обеспечения естественности действий оператора в процессе управления. Этому способствует расположение контактов включения команд управления движением на специальной мнемонической рукоятке. Нажим на рукоятку управления в каком-либо направлении приводит к включению привода, обеспечивающего выполнение соответствующего движения. Подобной рукояткой ручного командного управления манипулятором оснащены подводные обитаемые аппараты типа "Пайснс" (Pisces, Канада).
Пультами ручного командного управления оснащаются мощные координатные манипуляторы, предназначенные для работы в активных зонах атомных электростанций.
Обслуживание объектов, имеющих большие веса и габаритные размеры, характеризуется малыми скоростями передвижения при высоких требованиях к точности позиционирования. Поэтому именно командное управление движением исполнительного механизма оказывается наиболее рациональным. В манипуляционных роботах для экстремальных условий так же, как и в рассмотренных выше системах комбинированного дистанционно-автоматического управления промышленными роботами, может быть обеспечен режим обучения с помощью кнопочного пульта и последующего воспроизведения в автоматическом режиме необходимых действий манипулятора. Существенное отличие таких манипуляционных роботов от промышленных - необходимость удаления оператора из рабочей (активной) зоны и использования не только дистанционных методов управления, но и дистанционных методов наблюдения за обстановкой в рабочем пространстве. На рис. 4.2 изображена структурная схема манипулятора с дистанционным управлением.
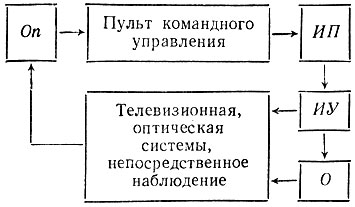
Рис. 4.2. Структурная схема манипулятора с дистанционным управлением: Оп - оператор; ИП - исполнительный привод: ИУ - исполнительное устройство; О - объект
Для работы оператора при незначительном удалении от активной зоны, например при обслуживании защитной камеры, в которой осуществляются исследования с радиоактивными веществами, но отсутствует возможность непосредственного наблюдения через окна с радиационной защитой, могут использоваться специальные оптические системы.
Однако самым перспективным средством наблюдения в рабочей зоне является телевизионная система. Для человека-оператора наиболее полная информация о рабочем пространстве может быть получена лишь при объемном изображении, т. е. при использовании стереотелевидения. Система стереотелевидения является важным элементом общей информационной системы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'