4.3. Копирующие манипуляторы
Наибольшее распространение при дистанционном выполнении работ, особенно в опасных для здоровья человека условиях, получили копирующие манипуляторы. Основной особенностью таких манипуляторов является использование задающего устройства, имеющего кинематическое подобие с исполнительным манипуляционным механизмом. При этом упрощаются действия оператора, который, управляя движением задающего устройства, совершает естественные движения рукой, свойственные рабочим процессам.
Основной задачей системы дистанционного управления копирующего манипулятора является обеспечение максимально точного воспроизведения исполнительным механизмом всех движений задающего устройства. Копирующие манипуляторы являются, пожалуй, наиболее универсальными устройствами, позволяющими выполнять самые разнообразные и наиболее сложные операции в изменяющихся условиях рабочей зоны при наличии препятствий.
Первыми копирующими манипуляторами явились механические манипуляторы, которые использовали для работы в защитных камерах.
Копирующие механические манипуляторы имеют сложную пространственную кинематику, обеспечивающую вывод захвата или рабочего инструмента в заданную точку рабочей зоны и их пространственную ориентацию.
Каждый шарнир задающего устройства связан механической передачей с соответствующим шарниром исполнительного устройства. В качестве силового элемента в механических передачах чаще всего применяются тропы и стальные ленты, которые через систему блоков связывают шарниры между собой. В случае необходимости осуществляется герметизация операторских помещений от рабочих зон. При этом герметичная проходка механических передач через защитный экран может производиться посредством магнитных муфт.
Прикладывая к задающему устройству в нужном направлении усилие, оператор приводит его в движение и, таким образом, перемещает исполнительное устройство, копирующее движения задающего устройства. Качество выполнения механических передач определяет величину сил сопротивления, приложенных к руке оператора при перемещении механического манипулятора и, следовательно, легкость и естественность работы с ним.
При управлении механическим манипулятором необходим постоянный непосредственный (визуальный) или с помощью оптической системы контроль оператором обстановки в рабочей зоне. Сложность механических передач определяет незначительную удаленность задающего устройства от исполнительного. Поэтому именно требование максимального удаления оператора от активной рабочей зоны привело к разработке и созданию дистанционно управляемых копирующих манипуляторов.
В простейшем случае дистанционно управляемый копирующий манипулятор представляет собой сочетание кинематически подобных исполнительного и задающего устройств. Каждое звено кинематической цепи исполнительного устройства приводится в движение двигателем следящего привода, на вход которого поступает сигнал, соответствующий взаимному расположению звеньев, имеющих совместную степень подвижности.
На задающем устройстве устанавливают лишь датчики положения, что облегчает конструкцию и делает его более компактным. Управление приводами осуществляется при формировании управляющих сигналов в "угловой" системе координат.
Очевидно, что в рассматриваемом случае управление движением исполнительного устройства, осуществляемое с помощью задающего устройства, является односторонним. Под односторонним управлением понимается возможность лишь однонаправленного воздействия на манипуляционный робот со стороны задающего устройства. При одностороннем управлении невозможно движение задающего устройства под действием усилий со стороны нагрузки, как это наблюдается в механических манипуляторах. Подобные манипуляторы получили наименование копирующих манипуляторов одностороннего действия.
Копирующие манипуляторы одностороннего действия необязательно должны иметь одинаковые размеры звеньев задающего и исполнительного устройств. Они обладают лишь идентичной кинематической схемой, что позволяет иметь прямое управление по каждой из степеней подвижности без преобразования сигналов с целью согласования координат задающего и исполнительного устройств.
Размеры задающего устройства определяются удобством работы оператора и условиями в зоне действий устройства управления. Как правило, при свободном пространстве в зоне оператора задающее устройство выполняют по кинематической схеме антропоморфного типа и оно имеет размеры, соответствующие средним размерам руки человека.
Управление может осуществляться как при движении всей руки человека, т. е. повторения движения кисти, предплечья и плеча, так и при движении только предплечья и кисти, либо лишь одной кисти. В каждом из этих случаев требуется постоянный контакт частей руки человека (плеча, предплечья и кисти), движение которых имитируется, с соответствующими звеньями задающего устройства. Подобное задающее устройство принято называть имитатором движения руки человека.
Полную имитацию движения руки удается осуществить в устройствах, называемых экзоскелетонами и полностью воспроизводящих двигательные функции верхних конечностей человека. Использование задающих устройств с полной имитацией движений руки человека позволяет создать копирующие манипуляторы, способные действовать в наиболее сложной обстановке рабочей зоны при наличии препятствий. Выполнение наиболее ответственных операций в недетерминированной обстановке, требующих максимального внимания оператора, приводит к необходимости обеспечения наибольшей естественности его движений.
Копирующие манипулятора типа экзоскелетона способны выполнять работы во внутренних пространствах объектов с узким входом. Это возможно ввиду наличия управляемого положения в пространстве как кистевого, так и локтевого суставов. Однако наиболее распространенным является управление в коде движения лишь кисти руки оператора. При этом задающее устройство имитирует движение и ориентацию в пространстве кисти руки человека, не повторяя движений его предплечья и плеча. Этого оказывается вполне достаточным при действиях манипулятора в свободном пространстве рабочей зоны манипулятора.
Действительно, человек, оперируя с предметами, как правило, управляет движением лишь кисти руки. Ему важны положение и ориентация конечной точки руки в месте взаимодействия с объектом. При этом он не контролирует движение ни плеча, ни предплечья. Это позволяет при создании манипуляторов, обслуживающих несложные объекты, обеспечивать работу лишь в коде движения захвата. Задающие устройства копирующих манипуляторов такого типа оснащены в кистевом узле специальной рукояткой, движением которой в пространстве и управляет человек-оператор.
Создание копирующих манипуляторов, управляемых в коде движений кисти руки оператора, позволило подойти к решению проблемы уменьшения габаритных размеров задающего устройства. Как правило, рабочее пространство оператора ограничено, что определяет требование компактности задающего устройства. При этом, сохраняя кинематическое подобие задающего и исполнительного устройств, в копирующих манипуляторах одностороннего действия удается существенно уменьшить размеры пульта управления. Действительно, размещение на задающем устройстве лишь датчиков положения, имеющих малые размеры, позволяет использовать малогабаритные задающие устройства. Сохранение кинематического подобия при принятой масштабности перемещений манипулятора обеспечивает наиболее простую и надежную работу копирующего манипулятора одностороннего действия.
Одним из основных недостатков копирующих манипуляторов одностороннего действия, оснащенных только системой исполнительных приводов по каждой степени подвижности, является отсутствие у оператора информации о силовом воздействии исполнительного устройства на объект работ, которая позволяет формировать наиболее рациональные законы управления движением при выполнении технологических операций.
Частичному устранению этого недостатка способствует использование в каждой степени подвижности задающего устройства элементов пассивной загрузки. Данные элементы могут быть выполнены в виде моментных загружателей, назначение которых - создание сопротивления движению, например, воспроизведением усилий трения, пропорциональных силовому воздействию объекта на исполнительное устройство в одной из степеней подвижности (рис. 4.3).
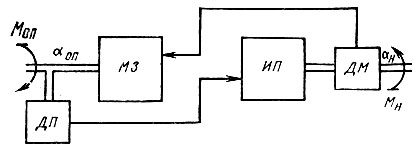
Рис. 4.3. Структурная схема моментного загружателя копирующего манипулятора: МЗ - моментный загружатель; ИП - исполнительный привод; ДП - датчик положения; ДМ - датчик момента; МsubОп/sub, МsubП/sub - моменты, действующие соответственно со стороны оператора и нагрузки; αsubОп/sub, αsubН/sub - выходные координаты соответственно на стороне оператора и нагрузки
Оснащение пассивными моментными загружателями задающего устройства обеспечивает надежную информацию оператора о величине усилий, противодействующих движению. Однако в неподвижном состоянии задающего, а следовательно, и исполнительного устройств оператор не может судить о силовых воздействиях со стороны нагрузки.
Системы пассивной загрузки нашли применение, в первую очередь, в космических манипуляторах для орбитальных объектов, где отсутствие силы тяжести существенно упрощает задачу отображения усилий.
Важным элементом системы отображения усилий является их измерение в суставах исполнительного устройства. Для этих целей могут быть использованы моментные датчики или способы косвенного измерения нагрузочных моментов в каждом из исполнительных приводов манипуляционного механизма. Однако более перспективным представляется создание многокоординатных датчиков момента, устанавливаемых в "кистевом суставе" исполнительного и задающего устройств (рис. 4.4). При его использовании необходимо применение специального вычислителя, преобразующего сигналы многокоординатного моментного датчика в сигналы, соответствующие моментам, приложенным в каждой из степеней подвижности манипулятора. Трудность обработки информации датчиков определяется сложностью описания кинематической схемы манипулятора при его пространственном движении.
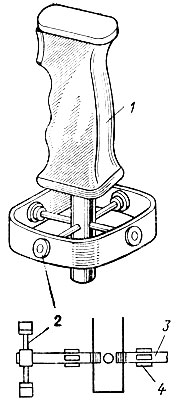
Рис. 4.4. Многокоординатный датчик момента задающего устройства: 1 - рукоятка управления; 2 - диафрагма; 3 - упругий стержень; 4 - кремневые тензодатчики
Система пассивной загрузки оказывается также весьма полезной при необходимости обеспечения управляемого дозирования развиваемых исполнительным устройством усилий. Моментные загружатели, установленные на задающем устройстве, могут являться элементами, фиксирующими положение, т. е. исключающими движения в суставах, при достижении предельно допустимых усилий или моментов в соответствующих степенях подвижности исполнительного устройства.
Рука человека обладает одним из важнейших свойств, обеспечивающих ее универсальность и удобство действий,- свойством двустороннего, или двунаправленного, действия. Прикладывая с помощью мышц необходимые усилия в соответствующих суставах, человек воздействует с помощью руки на предметы окружающего пространства, контролирует движение руки в этом пространстве, т. е. определяет как положение, так и ориентацию различных частей руки. Однако при этом человек с помощью нервно-мышечной системы воспринимает и обратные воздействия объекта на руку. Таким образом, рука человека является естественным "механизмом" двустороннего, или двунаправленного, действия.
Движение в суставах руки определяется суммарным силовым воздействием мускульной системы и объекта работ. При равенстве этих воздействий по всем суставам руки движение отсутствует.
Обеспечение двустороннего действия копирующего манипулятора определяется необходимостью создания наиболее совершенных технических средств дистанционного выполнения работ. Копирующие манипуляторы, обладающие свойствами двунаправленной передачи перемещений и усилий (от задающего устройства к исполнительному и в обратном направлении), получили название копирующих манипуляторов двустороннего действия (ДСД).
Манипуляторы двустороннего действия, обладая свойством передачи оператору воздействия со стороны нагрузки, обеспечивают наибольшую естественность его действий. Человек, работая с таким манипулятором, имеет возможность организовывать наиболее рациональные движения исполнительного устройства. Имея информацию о его взаимодействии с объектом, оператор способен быстро реагировать на изменяющиеся внешние ситуации, исключать соударения и поломки манипулятора.
Свойством двустороннего действия обладают и копирующие манипуляторы с механической передачей движения между задающими и исполнительными устройствами. Однако они не обеспечивают дистанционного выполнения работ при значительном удалении оператора от рабочей зоны. Кроме того, как уже отмечалось, механическим манипуляторам свойственны существенные потери передаваемого момента и, следовательно, они тяжелы в управлении, особенно при большой их грузоподъемности. При этом необходимы специальные методы и средства моментной разгрузки и масштабирования для придания им легкости движения и высокой чувствительности в восприятии внешней нагрузки.
Системы управления, обеспечивающие копирующему манипулятору свойства двунаправленной передачи перемещения и усилий, получили название следящих систем двустороннего действия (систем ДСД).
Структурная схема системы дистанционного управления копирующего манипулятора двустороннего действия приведена на рис. 4.5. Человек-оператор с помощью рукоятки управления воздействует на задающее устройство, имитирующее движение руки в пространстве. Задавая положение и ориентацию рукоятки (координаты  оператор прикладывает к ней в нужном направлении необходимые усилия и моменты
оператор прикладывает к ней в нужном направлении необходимые усилия и моменты  что приводит к перемещению задающего устройства по всем степеням его подвижности с координатами
что приводит к перемещению задающего устройства по всем степеням его подвижности с координатами  Система двустороннего действия обеспечивает двунаправленную передачу этих перемещений и моментов по каждой степени подвижности от задающего устройства к исполнительному. При этом исполнительное устройство, где воспроизводятся координаты
Система двустороннего действия обеспечивает двунаправленную передачу этих перемещений и моментов по каждой степени подвижности от задающего устройства к исполнительному. При этом исполнительное устройство, где воспроизводятся координаты  копирует движение задающего, воспроизводя захватом все движения рукоятки управления в пространстве.
копирует движение задающего, воспроизводя захватом все движения рукоятки управления в пространстве.
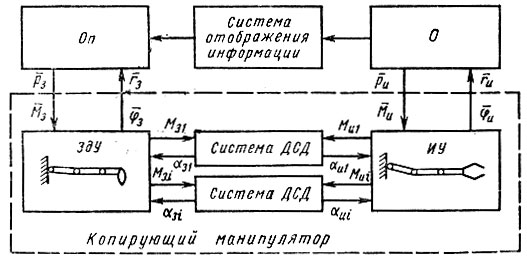
Рис. 4.5. Структурная схема системы управления копирующего манипулятора двустороннего действия: ЗдУ - задающее устройство; ИУ - исполнительное устройство;
 - векторы усилия соответственно на
- векторы усилия соответственно на  - векторы моментов на
- векторы моментов на  - обобщенные координаты перемещения
- обобщенные координаты перемещения  - угловые обобщенные координаты ЗдУ
- угловые обобщенные координаты ЗдУВоздействие объекта на исполнительное устройство передается через системы двустороннего действия и через кинематику задающего устройства на рукоятку управления и, следовательно, воспринимается - человеком-оператором. Таким образом обеспечивается эффект непосредственного выполнения рукой человека производственных операций.
Широкое распространение в практике создания дистанционно управляемых копирующих манипуляторов получили обратимые системы двустороннего действия симметричного типа, состоящие из двух следящих систем. Первая из них управляет положением вала нагрузки, вторая - положением вала оператора. Совокупность систем обеспечивает передачу угловых перемещений и передачу моментов, приложенных к осям системы.
На рис. 4.6, а показана обобщенная структурная схема системы ДСД симметричного типа, которая представляет собой сочетание двух взаимосвязанных систем, замкнутых по положению. Входной координатой для системы, управляющей валом нагрузки, является координата вала оператора. В то же время входной координатой - системы, управляющей валом оператора, является координата вала нагрузки. Управляющий сигнал, пропорциональный рассогласованию в угловом положении вала операторам вала нагрузки, поступает на вход усилителей исполнительной и задающей сторон.
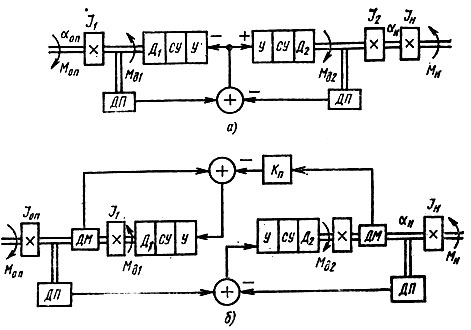
Рис. 4.6. Структурные схемы системы двустороннего действия: а - симметричного типа; б - несимметричного типа; Д1, Д2 - двигатели; У - усилитель; МД1, МД2 - моменты, развиваемые двигателями; J1, J2 - моменты инерции на валу Д1 и Д2; JИ - момент инерции нагрузки; JОП - момент инерции на валу оператора; СУ - схема управления двигателем; Кn - коэффициент усиления сигнала датчика момента
Таким образом, рассматриваемая система обладает свойством двунаправленное слежения по положению. Наличие взаимосвязи между входными и выходными координатами следящих систем приводит к тому, что изменение одной из этих координат вызывает изменение другой. Следовательно, системы ДСД могут быть отнесены к системам многосвязного регулирования, а точнее, к двумерным системам автоматического регулирования.
Основным отличием систем ДСД от других типов двумерных САР является то, что они помимо основного свойства - управления по положению - обладают свойством передачи усилий. Действительно, моменты, развиваемые двигателями на задающей и исполнительной сторонах, соответствуют внешним моментам, приложенным к системе со стороны оператора и нагрузки. Валы оператора и нагрузки будут неподвижны лишь в том случае, если 
 . Поскольку управление электродвигателями осуществляется от одних и тех же сигналов, то
. Поскольку управление электродвигателями осуществляется от одних и тех же сигналов, то  где n - коэффициент масштабности в передаче момента. При этом
где n - коэффициент масштабности в передаче момента. При этом

Для улучшения динамических показателей работы системы, а также для обеспечения устойчивости в обратимых системах ДСД симметричного типа используются датчики скорости движения вала оператора и вала нагрузки. При этом каждая из систем, замкнутых по положению, имеет датчики скорости на входном и выходном валах.
Другой разновидностью обратимых систем ДСД, обладающих свойством активного отражения усилия, являются так называемые обратимые системы ДСД несимметричного типа. Под системами несимметричного типа понимается совокупность исполнительной следящей системы, управляющей положением вала нагрузки, и моментного загружателя, информирующего оператора о величине нагрузочных моментов на исполнительной стороне.
Исполнительная следящая система не имеет принципиальных отличий от подобной системы в обратимых системах симметричного типа и приводит положение вала нагрузки в соответствие с положением вала оператора. Моментный загружатель может быть реализован, например, с помощью замкнутой по моменту системы, на вход которой поступает сигнал, пропорциональный нагрузочному моменту на исполнительной стороне.
Структурная схема обратимой системы ДСД несимметричного типа изображена на рис. 4.6, б. Управляющим сигналом системы на задающем устройстве является суммарный сигнал моментных датчиков, расположенных в механических передачах задающего и исполнительного устройств.
Практика проектирования и эксплуатации копирующих манипуляторов двустороннего действия убедительно показывает, что наличие у систем свойств активного отражения усилия, т. е. полной обратимости, не всегда является обязательным. Иногда это может привести даже к излишней утомляемости оператора, например в том случае, если в процессе выполнения операций с предметами требуется сохранять неподвижным их состояние в течение длительного времени. Более того, наличие свойств полной обратимости систем двустороннего действия может оказаться даже опасным для оператора, если со стороны объекта возникает силовое воздействие, превышающее возможности оператора по какой-либо из степеней подвижности.
Следует также иметь в виду, что оператору весьма часто помимо функций управления задающим органом манипулятора необходимо выполнять и другие задачи. При этом требуется фиксировать положения задающего органа в каждой из степеней подвижности, например, с помощью тормозных муфт. В противном случае при включении обратимых систем ДСД на каждой степени подвижности задающий орган начнет перемещаться под действием усилий, приложенных со стороны объекта выполняемых работ.
Все это приводит к необходимости поиска принципиально новых решений, свободных от указанных выше недостатков.
Действительно, если рассмотреть работу механического копирующего манипулятора, каждая степень подвижности которого оснащена необходимыми механическими передачами, то станет очевидным, что он не имеет приведенных выше недостатков, присущих манипулятору с обратимыми передачами. При неподвижном положении исполнительного органа подобного манипулятора оператор не ощущает массы объекта. Это определяет малую утомляемость оператора даже при длительном удержании груза.
В манипуляторе с самотормозящимися передачами движение осуществляется лишь со стороны оператора. При этом силовое воздействие нагрузки не может "пересилить" оператора, оно может лишь привести к прекращению движения. В подобном манипуляторе оператор имеет возможность оставить задающий орган в произвольном положении без использования дополнительных фиксирующих устройств.
Следовательно, копирующий манипулятор, оснащенный в каждой степени подвижности самотормозящимися необратимыми передачами, обладает определенными положительными качествами. Такой манипулятор имеет и недостаток - отсутствие полного ощущения нагрузочных моментов в те моменты времени, когда это требуется в процессе выполнения операций с неизвестными объектами.
Решение этой проблемы может быть достигнуто при одновременном использовании в степенях подвижности задающего органа исполнительных элементов систем активного отражения усилия в сочетании с фиксирующими элементами (например, тормозными муфтами). Фиксация положения суставов задающего органа необходима в том случае, если оператор не удерживает его в заданном положении при отсутствии нагрузки в захватывающем устройстве исполнительного органа. Однако подобное решение приводит к увеличению размеров задающего органа и не обеспечивает высокую надежность его работы. Переключение режимов работы такой системы также усложняет действия оператора.
Рассматриваемая проблема успешно и достаточно просто решается при использовании систем ДСД, в которых сочетаются обратимые и необратимые свойства.
Рассмотрим принципы построения подобных систем двустороннего действия. Структурная схема комбинированной системы, двустороннего действия, обладающей возможностью сочетания обратимых и необратимых свойств, показана на рис. 4.7. На задающей и исполнительной сторонах копирующего манипулятора используются системы, замкнутые отрицательными обратными связями. На входы этих систем через интегрирующий элемент подается один и тот же сигнал с выхода функционального преобразователя, на вход которого поступают сигналы с датчиков моментов, расположенных на валу оператора и на валу нагрузки.
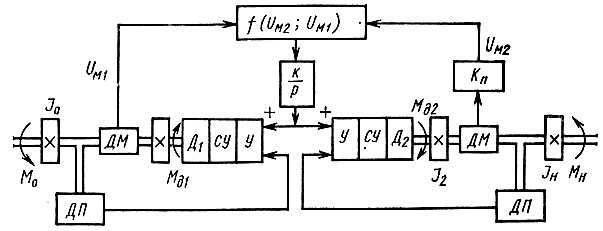
Рис. 4.7. Структурная схема, комбинированной системы двустороннего действия
Функциональный преобразователь работает в двух режимах. В первом из них обеспечивается обычное суммирование сигналов моментных связей, аналогичное их суммированию в несимметричных системах двустороннего действия. При этом реализуется обратимость системы двустороннего действия в отношении слежения по положению и по моменту.
Действительно, в установившемся режиме при постоянных значениях момента оператора и нагрузки производная от сигнала на входе каждой из систем, а следовательно, и скорости движения выходных координат пропорциональны разности моментных воздействий со стороны оператора и нагрузки, т. е. в системе сохраняется основное свойство, присущее обратимым системам ДСД.
Во втором режиме, обеспечивающем необратимость системы двустороннего действия, функциональный преобразователь осуществляет сравнение сигналов моментных датчиков задающей и исполнительной сторон таким образом, что сигнал исполнительной стороны формирует зону нечувствительности для сигнала задающей стороны. Действие этой зоны нечувствительности проявляется в случае, когда нагрузочный момент препятствует движению системы в сторону действия момента, развиваемого оператором. При этом движение системы возможно лишь в том случае, если момент оператора превышает противодействующий нагрузочный момент или если момент оператора направлен в сторону действия нагрузочного момента. В последнем случае действие нагрузочного момента исключается. В результате оператор будет ощущать лишь противодействующие нагрузочные моменты.
Нетрудно заметить, что по аналогичным законам работает и самотормозящаяся передача при однонаправленном реверсивном движении от вала оператора к валу нагрузки. Именно поэтому рассматриваемая схема обеспечивает системе двустороннего действия сочетание необратимых и обратимых свойств при переключении режимов работы функционального преобразователя.
Вопросам проектирования следящих систем двустороннего действия копирующих манипуляторов посвящена монография [37], в которой изложены принципы построения, вопросы динамики, анализа и синтеза этого особого класса двумерных систем автоматического управления.
Копирующие манипуляторы, получившие наиболее широкое применение в атомной энергетике, в последние годы начинают активно использовать и в других роботехнических комплексах. Принципы копирующего управления, позволяющие создать манипуляционные механизмы для наиболее сложных задач при выполнении технологических операций, найдут применение в медицине, сфере бытового обслуживания и в специальных областях современной техники.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'