4.4. Дистанционно управляемые манипуляторы и роботы с полуавтоматическим управлением
Использование дистанционно управляемых манипуляционных роботов на автономных объектах, например на обитаемых подводных и космических аппаратах, требует учета ряда факторов, связанных с условиями их эксплуатации. Основными из них являются ограниченные размеры зоны действий оператора и жесткие требования по минимизации весовых и габаритных характеристик задающего устройства и всей системы управления манипуляционного робота. Наиболее полно этим требованиям отвечает система полуавтоматического управления манипулятором (рис. 4.8). В ее состав входят исполнительное устройство с системами управления, задающее устройство в виде рукоятки малых перемещений и микро-ЭВМ (специализированный вычислитель). С помощью системы отображения зрительной информации оператор наблюдает за работой манипулятора.
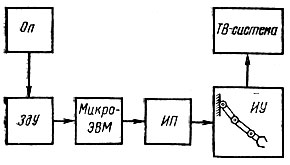
Рис. 4.8. Система полуавтоматического управления манипулятором
В полуавтоматических системах человек-оператор, воздействуя на управляющую рукоятку, задает желаемое движение захвата исполнительного устройства, а микро-ЭВМ по сигналам от датчиков рукоятки формирует управляющее воздействие, поступающее на приводы степеней подвижности исполнительного устройства. На рис. 4.9 показаны различные модификации рукояток управления, oсновным отличием полуавтоматических систем от систем копирующего типа является отсутствие кинематического подобия между задающим и исполнительным устройствами. Кинематическая схема и размеры исполнительного устройства определяются условиями его размещения в рабочей зоне, грузоподъемностью, видом исполнительных приводов. Вид задающего устройства зависит от размеров рабочей зоны оператора и эргономических требований.
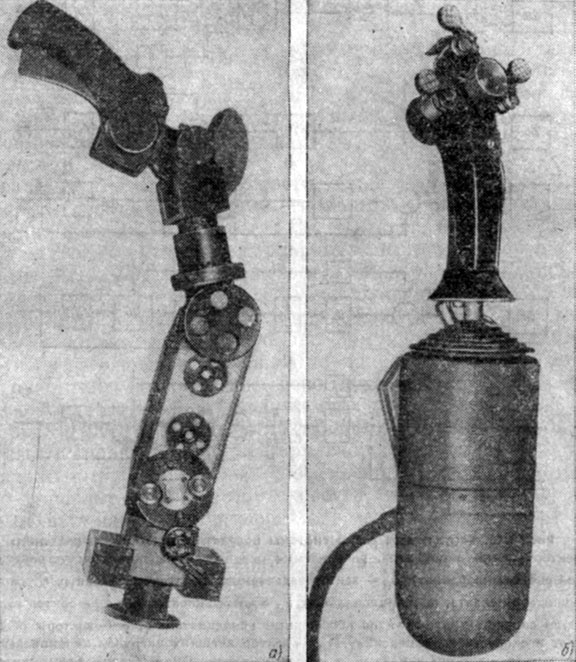
Рис. 4.9. Рукоятки полуавтоматического управления манипулятором
Следует отметить, однако, что для обеспечения полной управляемости в полуавтоматических системах управления манипулятора число степеней подвижности задающего устройства должно соответствовать числу степеней подвижности исполнительного механизма. Так, для управления манипулятором, имеющим антропоморфную кинематическую схему с шестью степенями подвижности (исключая захват), должно использоваться задающее устройство в виде шестистепенной рукоятки. Это позволяет обеспечить перемещение захвата в любую точку обслуживаемой зоны и необходимую его ориентацию в пространстве.
Совокупность шести входных сигналов, необходимых для управления движением захвата манипулятора, может быть сформирована также при помощи двух трехстепенных рукояток. Например, перемещение захвата исполнительного устройства в рабочей зоне может быть обеспечено с помощью трехстепенной рукоятки поступательного типа, а его угловая ориентация - трехстепенной рукояткой вращательного типа.
Основными отличительными свойствами манипуляционных роботов с полуавтоматическим управлением являются:
- малые весогабаритные характеристики задающих устройств, что особенно важно для манипуляционных роботов автономных объектов;
- возможность управления перемещениями исполнительного устройства, имеющего значительные размеры, так как не требуется обеспечения кинематического подобия задающего и исполнительного устройств;
- полуавтоматическое управление является менее утомительный ля оператора, поскольку человек не совершает значительных перемещений задающего устройства.
Формирование алгоритмов управления отдельными степенями подвижности манипулятора в полуавтоматических системах осуществляет микро-ЭВМ, выполняющая функции специального вычислителя. В манипуляционных роботах применяют несколько способов полуавтоматического управления, реализующих тот или иной алгоритм управления.
Управление по вектору скорости. Одним из наиболее распространенных способов полуавтоматического управления является управление по вектору скорости. Человек-оператор формирует при помощи задающего устройства, например шестистепенной рукоятки малых перемещений, вектор скорости и направления движения захвата исполнительного устройства манипулятора. При этом микро-ЭВМ рассчитывает скорости относительного движения звеньев исполнительного устройства. Обычно при управлении по вектору скорости применяют подпружиненные по каждой степени подвижности рукоятки, позволяющие непосредственно измерять компоненты командного вектора, задаваемого оператором.
На рис. 4.10, а приведена структурная схема системы полуавтоматического управления по вектору скорости.
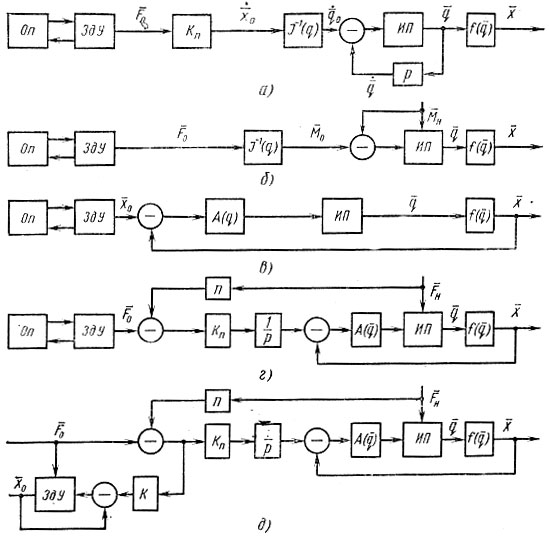
Рис. 4.10. Структурная схема системы полуавтоматического управления:
 - вектор усилий и моментов, развиваемых оператором на задающем устройстве (в абсолютной системе координат);
- вектор усилий и моментов, развиваемых оператором на задающем устройстве (в абсолютной системе координат);  - вектор задаваемых оператором линейных и угловых скоростей движения схвата, пропорциональных с коэффициентом
- вектор задаваемых оператором линейных и угловых скоростей движения схвата, пропорциональных с коэффициентом  - вектор задаваемых оператором скоростей движения по обобщенным координатам;
- вектор задаваемых оператором скоростей движения по обобщенным координатам;  - векторы обобщенных координат и скорости их изменения;
- векторы обобщенных координат и скорости их изменения;  - вектор внешних нагрузок на приводы манипулятора;
- вектор внешних нагрузок на приводы манипулятора;  - вектор линейных и угловых перемещений схвата манипулятора
- вектор линейных и угловых перемещений схвата манипулятора
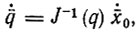
При рассмотрении основных соотношений систем полуавтоматического управления по вектору скорости, обозначим вектор параметров захвата манипулятора через  а вектор обобщенных координат манипулятора, за которые обычно принимают угловые перемещения звеньев исполнительного механизма, через
а вектор обобщенных координат манипулятора, за которые обычно принимают угловые перемещения звеньев исполнительного механизма, через  тогда
тогда

Следовательно, обобщенные координаты однозначно определяют положение захвата.
Если человек-оператор с помощью рукоятки управления формирует вектор требуемой скорости захвата  то скорости звеньев исполнительного механизма
то скорости звеньев исполнительного механизма  определяют с помощью выражения
определяют с помощью выражения
где  - матрица, обратная
- матрица, обратная 
Сигналы, соответствующие координатам  поступают на замкнутые по скорости приводы отдельных степеней подвижности исполнительного устройства. Обратная связь по скорости осуществляется с помощью сигналов датчика, установленного на выходном валу привода, или предварительного дифференцирования сигналов датчика положения
поступают на замкнутые по скорости приводы отдельных степеней подвижности исполнительного устройства. Обратная связь по скорости осуществляется с помощью сигналов датчика, установленного на выходном валу привода, или предварительного дифференцирования сигналов датчика положения  подавая их на соответствующие приводы исполнительного устройства.
подавая их на соответствующие приводы исполнительного устройства.
Основные трудности возникающие при создании систем управления по вектору скорости - сложность реализации алгоритмов обращения матрицы  . Микро-ЭВМ, осуществляющая процедуру обращения в реальном масштабе времени, должна иметь достаточно высокое быстродействие.
. Микро-ЭВМ, осуществляющая процедуру обращения в реальном масштабе времени, должна иметь достаточно высокое быстродействие.
Управление по вектору скорости обеспечивает надежное управление манипуляционным роботом при свободной зоне обслуживания и снижает утомляемость оператора. Однако отсутствие возможности дозирования усилий крайне затрудняет работу со "связанными" объектами при наличии препятствий.
Управление по вектору силы (момента). При полуавтоматическом управлении манипулятором по вектору силы обеспечивается приложение к объекту манипулирования воздействий, пропорциональных силам и моментам, развиваемым человеком-оператором на рукоятке - управления. Микро-ЭВМ, используя информацию об усилиях, действующих на рукоятке управления, определяет величины моментов, которые необходимо воспроизвести приводами манипулятора по всем степеням подвижности.
Структурная схема системы управления по вектору силы показана на рис. 4.10, б.
Вычисление вектора моментов осуществляется по формуле
где  означает транспонирование матрицы Координаты вектора
означает транспонирование матрицы Координаты вектора  поступают на замкнутые по моменту исполнительные приводы манипуляционного устройства.
поступают на замкнутые по моменту исполнительные приводы манипуляционного устройства.
Данный способ управления позволяет, изменяя величину и направление сил и моментов, прикладываемых манипулятором к объекту, эффективно выполнять сложные операции со "связанными" объектами. В то же время работа манипулятора в свободной зоне, например, при перемещении захвата из точки в точку затруднена, поскольку вектор силы, задаваемый оператором, не всегда точно совпадает с вектором скорости движения захвата.
Позиционное управление. Метод позиционного управления манипулятором основан на копировании перемещений рукоятки задающего устройства захватом исполнительного устройства. Причем кинематические подобия этих устройств могут не соблюдаться. Рассмотренный ранее метод копирующего управления с кинематически подобными задающим и исполнительным устройствами является частным случаем позиционного полуавтоматического управления.
Структурная схема системы позиционного управления показана на рис. 4.10, в. Из обобщенных координат задающего устройства вычитаются координаты захвата . Полученная разность пересчитывается в сигналы управления по скорости изменения выходной координаты каждого из приводов:

Наилучший результат по точности отработки траекторий может быть получен при  Однако в связи со сложностью определения обратной матрицы
Однако в связи со сложностью определения обратной матрицы  может применяться преобразование вида
может применяться преобразование вида  несколько ухудшающее динамику работы позиционной системы, но обеспечивающее достаточное быстродействие и более простую схему реализации.
несколько ухудшающее динамику работы позиционной системы, но обеспечивающее достаточное быстродействие и более простую схему реализации.
Метод позиционного управления предпочтителен при выполнении технологических операций, требующих точной координации движений манипуляционного устройства, что важно, например, для операций сборки.
Комбинированные методы полуавтоматического управления. Каждый из рассмотренных выше методов полуавтоматического управления наиболее эффективен при выполнении определенного класса операций. Системы управления универсальным манипулятором рационально строить на принципах комбинированного управления. Одним из вариантов такого управления является система позиционно-скоростного управления. При проведении транспортных операций с большими перемещениями манипулятора в рабочей зоне используется управление по вектору скорости. Осуществление операций, требующих высокой точности и, следовательно, небольших перемещений, наиболее рационально при позиционном управлении. Переключение режимов работы в такой системе может производиться по команде оператора или автоматически. В автоматическом режиме переключение происходит, когда отклонение рукоятки управления от нейтрального положения превысит заданную величину. При малых отклонениях рукоятки осуществляется позиционное управление захватом манипулятора, при больших - управление по вектору скорости.
Необходимость сочетания в полуавтоматической системе управления положительных свойств управления по вектору скорости при транспортных перемещениях и по вектору силы (момента) при работе со "связанными" объектами привела к разработке моментно-скоростных систем управления.
Структурная схема моментно-скоростной системы управления одностороннего действия приведена на рис. 4.10, г. Алгоритм работы такой системы управления определяется выражением

где  - вектор усилий и моментов нагрузки, приведенный к системе координат задающего устройства; n - диагональная матрица масштабных коэффицентов.
- вектор усилий и моментов нагрузки, приведенный к системе координат задающего устройства; n - диагональная матрица масштабных коэффицентов.
Координаты вектора . могут измеряться многокоординатным датчиком сил и моментов, расположенным на захвате манипулятора, или вычисляться по моментам на выходном валу в каждой степени подвижности исполнительного устройства.
В свободной зоне без нагрузки  система управления Работает по вектору скорости, скорость перемещения захвата пропорциональна усилию на рукоятке, а направления вектора скорости и усилия совпадают. При работе со "связанными" объектами (например, открывание люка) оператор, изменяя
система управления Работает по вектору скорости, скорость перемещения захвата пропорциональна усилию на рукоятке, а направления вектора скорости и усилия совпадают. При работе со "связанными" объектами (например, открывание люка) оператор, изменяя  задает необходимую траекторию движения, а вектор усилий нагрузки . заставляет захват двигаться по вынужденному закону в режиме компенсации внешних усилий. Таким образом, захват манипулятора будет двигаться по траектории, которую формируют наложенные на него связи. В такой системе манипулятор фактически управляется как со стороны оператора, так и со стороны нагрузки. Несмотря на то что в задающем устройстве отсутствуют приводы и усилия, нагрузки не оказывают активного воздействия на руку оператора, система формирует косвенное отражение усилий. Для удержания исполнительного устройства в неподвижном состоянии необходимо обеспечить выполнение условия
задает необходимую траекторию движения, а вектор усилий нагрузки . заставляет захват двигаться по вынужденному закону в режиме компенсации внешних усилий. Таким образом, захват манипулятора будет двигаться по траектории, которую формируют наложенные на него связи. В такой системе манипулятор фактически управляется как со стороны оператора, так и со стороны нагрузки. Несмотря на то что в задающем устройстве отсутствуют приводы и усилия, нагрузки не оказывают активного воздействия на руку оператора, система формирует косвенное отражение усилий. Для удержания исполнительного устройства в неподвижном состоянии необходимо обеспечить выполнение условия  При этом чем больше усилие нагрузки, тем большее усилие должен приложить оператор к задающей рукоятке. При работе с объектами для удержания захвата на требуемой траектории при изменяющихся усилиях нагрузки оператор должен компенсировать это изменение приложением усилия на рукоятке. При этом воспроизводится эффект ощущения воздействия со стороны нагрузки.
При этом чем больше усилие нагрузки, тем большее усилие должен приложить оператор к задающей рукоятке. При работе с объектами для удержания захвата на требуемой траектории при изменяющихся усилиях нагрузки оператор должен компенсировать это изменение приложением усилия на рукоятке. При этом воспроизводится эффект ощущения воздействия со стороны нагрузки.
Важным аспектом применения моментно-скоростных систем одностороннего действия является возможность их использования в погрузочных сбалансированных манипуляторах и экзоскелетонах. Устройства представляют собой механизмы, оснащенные приводами, усиливающими мускульные возможности человека. Погрузочные сбалансированные манипуляторы используют для перемещения, ориентации и установки тяжелых деталей в условиях промышленного производства. Необходимые при этом движения оператор осуществляет, прикладывая усилия к рукоятке, расположенной в непосредственной близости от перемещаемой детали и оснащенной датчиками направления движения. Экзоскелетоны, внутрь которых входит рука оператора, позволяют манипулировать с грузами, значительно превышающими физические возможности человека.
Применение моментно-скоростных систем управления в экзоскелетонах позволяет обеспечить оператору ощущение нагрузочных моментов и усилий в необходимом масштабе и существенно облегчает выполнение работ, связанных с точными перемещениями и дозированием усилий.
Моментно-скоростные системы двустороннего действия (рис. 4.10, д) в отличие от систем одностороннего действия имеют на задающем устройстве электродвигатели приводов, активно воздействующие на руку оператора. Алгоритм управления приводами и задающего устройства характеризуется тем, что отклонение рукоятки от нейтрального положения пропорционально разности усилий, приложенных со стороны оператора, и нагрузки к задающему и исполнительному устройствам.
Система управления приводами исполнительного устройства аналогична рассмотренной выше системе одностороннего действия. Следовательно, для удержания манипулятора в неподвижном состоянии необходимо, чтобы усилие оператора было равно усилию нагрузки. При этом рукоятка управления удерживается в нейтральном положении. Если усилие, развиваемое оператором, не равно усилию нагрузки, то рукоятка управления отклоняется приводами от нейтрального положения, информируя оператора о величине несоответствия этих усилий.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'