4.5. Комбинированные системы дистанционно-автоматического управления манипуляционными роботами
Выбор типа системы управления манипуляционного робота во многом определяет эффективность его работы. Основная задача, стоящая перед проектировщиками, заключается в облегчении работы оператора путем автоматизации процесса управления при выполнении повторяющихся операций, а также за счет использования средств адаптации и очувствления робота.
Между тем требования, предъявляемые к системе управления, при выполнении различных операций достаточно противоречивы. Так, при транспортировке грузов с помощью манипулятора необходимо обеспечение высокой точности позиционирования захвата при движении по задаваемой оператором траектории, особенно при наличии препятствий. В то же время выполнение операций со "связанными" объектами, например открывание люков, стыковка разъемов и большинство монтажно-сборочных операций, требуют от системы управления манипулятором наличия "податливости", а также обеспечения в захвате возможности дозирования развиваемых сил и моментов.
Очевидно, что каждый из рассмотренных методов управления имеет определенные преимущества и недостатки при выполнении конкретных операций. Поэтому выбор какого-то одного метода, давая преимущества в определенном диапазоне операций, может значительно затруднить, а иногда и сделать невозможным выполнение других операций. В этом случае несовершенство системы управления оператор будет стремиться скомпенсировать повышением внимания и более осторожной работой. Последнее неизбежно приводит к более быстрой его утомляемости и снижению эффективности работы.
Следовательно, решение задачи создания эффективной системы управления необходимо искать в применении комбинированных систем. Такие системы управления должны допускать возможность работы в различных режимах, которые оператор мог бы выбирать в зависимости от вида и условий выполняемой работы, изменяя структуру и параметры системы управления манипулятором. До недавнего времени реализация таких систем управления представляла большие технические трудности из-за отсутствия компактных устройств управления с необходимыми функциональными возможностями. Однако с развитием микроЭВМ появилась возможность создания системы управления манипуляторами, которые при небольших массах и габаритных размерах могут обеспечить широкие функциональные возможности робота. Использование микроЭВМ в системе управления манипулятором позволяет сравнительно просто реализовать автоматические режимы управления как по заранее разработанным программам, так и по программам, создаваемым в процессе работы средствами адаптации или методами "обучения". Поэтому для выполнения сложных работ такие системы дистанционно-автомагического управления являются наиболее предпочтительными. Важнейшей составной частью подобной робототехнической системы является ее программное обеспечение.
Обобщенная структурная схема программы управления в дистанционно-автоматическом режиме показана на рис. 4.11. Основной частью программного обеспечения системы управления является программа-диспетчер, которая обеспечивает связь ЭВМ с оператором, вызов различных программ из долговременной памяти по его сигналам, автоматический вызов и запуск служебных, контрольных и диагностических программ, выдачу сообщений о функционировании системы управления и исполнительного механизма.
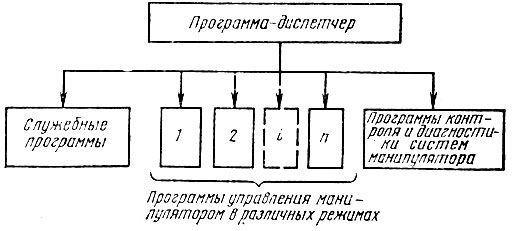
Рис. 4.11.Обобщенная структурная схема программы управления в дистанционно-автоматическом режиме
Программы работы системы управления обеспечивают связь с используемыми в манипуляционном роботе задающими устройствами и датчиками исполнительного механизма, переработку информации, получаемой от них, выработку управляющих сигналов на задающие и исполнительные устройства в соответствии с заложенными законами и методами управления. Эти программы могут вызываться по командам оператора или автоматически по информации об условиях работы манипулятора, поступающей в программу-диспетчер.
Программа контроля блоков и узлов манипулятора должна работать постоянно, как фоновая программа, обеспечивая их непрерывную проверку, анализируя информацию от различных датчиков. В случае обнаружения отказов программа-диспетчер может вызвать одну из программ диагностики отказов, находящихся в долговременной памяти. При наличии дублирующих элементов, которые, как правило, вводятся в сложные системы для повышения их надежности, программа-диспетчер может автоматически или по команде оператора, после обнаружения неисправного элемента, подключить резервный.
Служебные программы необходимы для обслуживания внешних устройств ЭВМ (дисплеев, клавиатур, блоков сопряжения и т. д.), а также предоставляют возможность оператору модифицировать существующие и разрабатывать новые программы работы системы управления и всего программного обеспечения данной системы управления.
Особенностью системы управления робота является возможность проведения работ в различных режимах, наиболее эффективных в конкретной ситуации. Все элементы операций, поддающиеся формализации и программированию (в том числе с простейшей адаптацией), особенно те, которые часто повторяются, выполняются роботом в автоматическом режиме с управлением от ЭВМ. Оператор в этом случае осуществляет наблюдение за действиями робота. При этом программы для автоматического режима могут быть составлены заранее и вызываться с пульта по мере надобности или вводиться путем "обучения", когда оператор с помощью задающего устройства перемещает в дистанционном режиме исполнительный механизм, движения которого запоминаются для последующего многократного выполнения в автоматическом режиме.
Запрограммированные элементы операций могут сочетаться в различных комбинациях друг с другом. Необходимая последовательность их выполнения задается каждый раз программным путем или в супервизорном режиме, когда оператор на пульте управления осуществляет сам переключение программ или дает целеуказательные команды, вызывающие цикл запрограммированных операций (взять инструмент и переместиться из начального положения в определенную точку рабочей зоны и т. п.). Затем оператор включает другую программу автоматического проведения роботом определенной операции.
Режим дистанционного управления применяется оператором в любых запрограммированных ситуациях или в случаях отказа автоматической системы управления. При этом оператор использует задающие устройства на своем пульте управления.
Функциональная схема одного из возможных вариантов комбинированной дистанционно-автоматической системы управления манипуляционным роботом показана на рис. 4.12. Система включает исполнительные приводы, силовые агрегаты которых установлены на каждой степени подвижности исполнительного механизма. Блоки управления приводами (БУП) расположены в стойке управления. Каждая из исполнительных систем замкнута по положению. На входы блоков управления сигналы поступают с управляющей микро-ЭВМ (типа "Электроника-60"). Выходные каскады согласующих элементов микропроцессора обеспечивают непосредственное управление приводами от сигналов, поступающих со специальных вычислителей, в цифровом коде. Аналогичную структуру имеет малогабаритное задающее устройство.
В кистевых узлах исполнительного механизма и задающего устройства встроены многостепенные моментные датчики, формирующие сигналы по векторам моментов, действующих со стороны оператора и объекта.
Полуавтоматическое управление роботом может осуществляться как в позиционном копирующем режиме, так и в скоростном, а также с использованием силового очувствления. Выполнение наиболее сложных операций, не внесенных в программное обеспечение автоматических режимов, особенно сборочного типа при взаимодействии со связанными объектами в рабочей зоне, имеющей препятствия, может осуществляться при копирующем методе управления с силовым очувствлением. При этом осуществляется сравнение сигналов многостепенных моментных датчиков с помощью сравнивающих элементов управляющей ЭВМ.
Разностное воздействие вектора момента оператора и вектора суммарного нагрузочного момента поступает на спецвычислитель или преобразователь координат, который формирует управляющие воздействия по каждой степени подвижности робота. Через согласующие элементы эти воздействия поступают на входы блоков управления электродвигателями исполнительного механизма и на входы блоков управления маломощными системами задающего устройства.
Согласующие элементы содержат также схемы интегрирования сигналов, которые формируют сигналы управления по положению при наличии управляющих сигналов по моменту. Подобная система позволяет придать манипуляционному роботу свойства двустороннего действия, что обеспечивает наиболее эффективную работу оператора в сложных ситуациях.
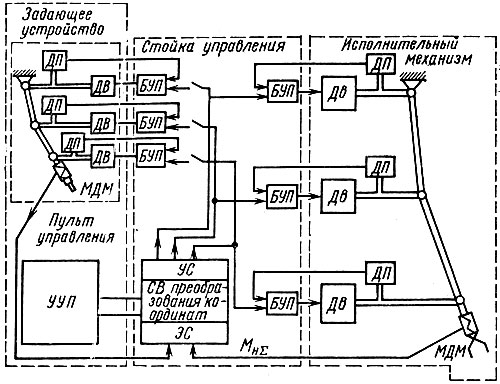
Рис. 4.12. Функциональная схема комбинированной дистанционно-автоматической системы управления: ДП - датчик положения; Дв - двигатель; МДМ - многокоординатный датчик; БУП - блок управления приводом; УУП - устройство управления приводом; УС - устройство сопряжения; СВ - специальный вычислитель; ЭС - элемент сравнения
При выполнении транспортных операций в свободном пространстве рабочей зоны и ряда других легко программируемых операций использование копирующего режима является малоэффективным. В этих случаях применяется автоматический программный режим работы робота. В непредвиденных ситуациях используется полуавтоматический метод управления по разности векторов моментных воздействий со стороны оператора и со стороны нагрузки при заторможенном задающем устройстве. Для осуществления этого метода отключаются сигналы управления на задающем устройстве, что обеспечивает его фиксацию в исходном (наиболее удобном для оператора) положении.
Использование принципов, позволяющих управлять манипуляционными роботами в различных режимах дистанционно-автоматического управления, придает манипуляционной роботехнической системе широкие функциональные возможности.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'