4.6. Области применения дистанционно управляемых манипуляционных роботов
Наибольшее применение дистанционно управляемые манипуляционные роботы получили в экстремальных средах для выполнения работ в недоступных местах или опасных для здоровья человека условиях.
К таким сферам относятся космические и подводные пространства, производства и лаборатории с высоким уровнем радиационного излучения, зоны обслуживания термоядерных энергетических установок и т. п.
Все большее значение придается использованию таких устройств при создании автоматизированного оборудования для различных отраслей народного хозяйства, в быту и медицине.
Рассмотрим наиболее важные аспекты применения дистанционно управляемых манипуляционных роботов в условиях экстремальных
Применение роботов в космосе связано с широкими научными и практическими задачами, решаемыми на околоземной орбите, а также при исследовательских полетах на Луну и другие планеты. Среди них инспекция, обслуживание и ремонт различных объектов в условиях открытого космоса, на поверхности Луны и других планет; сборка, монтаж и испытания в условиях космоса искусственных спутников Земли, крупных антенн и панелей солнечных элементов, долговременных орбитальных, лунных и планетных станций; установка или замена отдельных блоков, приборов космических объектов; обеспечение технической помощи космонавтам в аварийных ситуациях (например, остановка вращения космического корабля, участие в снятии космонавтов с корабля); научно-исследовательские работы в условиях открытого космоса и планет, исследование минеральных и энергетических ресурсов Луны и т. д.
Широта и многообразие задач, решаемых в настоящее время в космосе, требуют использования как информационных, так и манипуляционных (рабочих) роботов.
К информационным роботам, предназначенным для получения в космическом пространстве, обработки и передачи на землю необходимой информации, можно отнести орбитальные автоматические станции, автоматические или телеуправляемые аппараты, направляемые на Луну и другие планеты.
Создание подвижных, в том числе шагающих, аппаратов - новый важный этап в изучении Луны и планет. Они расширяют возможности космических исследований,позволяют при помощи одного аппарата получить сведения с разных участков поверхности. Будущее освоение Луны и других планет трудно представить без автоматических или дистанционно управляемых транспортных средств. Первый советский лунный мобильный разведчик "Луноход" является по существу информационным роботом на поверхности Луны. Возможно создание планетоходов и другого назначения, например для перевозки космонавтов, транспортировки грузов, планетоходов с установленным на них оборудованием различного вида, в том числе и с манипуляционными устройствами.
Наличие в космосе невесомости и глубокого вакуума открывают большие перспективы перед новой областью науки и техники - космической технологией.
При выполнении целого комплекса технологических операций, связанных с получением различных веществ в невесомости и возможным анализом основных характеристик полученных материалов, необходимо создание специальных космических лабораторий, выполненных в виде отсека или модуля, состыкованного с космическим кораблем и состоящего из набора установок, обслуживаемых одним или несколькими роботами.
Манипуляционные устройства, решающие задачи технического обслуживания в космосе и выполняющие различные рабочие операции, размещают как на основных объектах, так и автономно. В первом случае они находятся, например, на космических долговременных обитаемых станциях, транспортных кораблях многоразового использования, космических буксировщиках и т.д., а во втором -они образуют подвижные объекты с манипуляторами, дистанционное управление которыми происходит с Земли или космической станции.
Телеуправляемый манипуляционный робот представляет собой сложную кибернетическую систему. Человек-оператор управляет такой системой с помощью кабельной линии или радиосвязи, находясь в безопасном и удобно расположенном месте. Вмешательство человека в работу может быть минимальным, если робот обладает достаточно высоким программным обеспечением для автоматических действий, а в перспективе - искусственным интеллектом, и способен самостоятельно решать различные задачи.
Необходимость выполнения телеуправляемым роботом разнообразных работ требует использования манипуляторов со сменным инструментом. С помощью телеуправляемого робота могут быть выполнены проверка систем спутника, обнаружение и устранение неисправностей, перезарядка батарей, смена приборов, очистка загрязненных поверхностей и т. д. Телеуправляемый робот может произвести незначительный ремонт на месте, а в случае серьезного повреждения -доставить спутник на транспортный корабль для ремонта или возвращения на Землю.
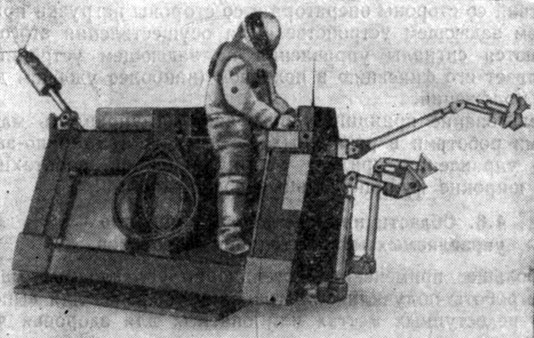
Рис. 4.13. Космическая свободно маневрирующая платформа, оснащенная манипуляционным устройством
Манипуляционные роботы, управляемые непосредственно экипа-жем, могут быть установлены на свободно маневрирующих в пространстве автономных аппаратах, транспортных кораблях многоразового использования, строительных площадках, станциях и крупных космических сооружениях.
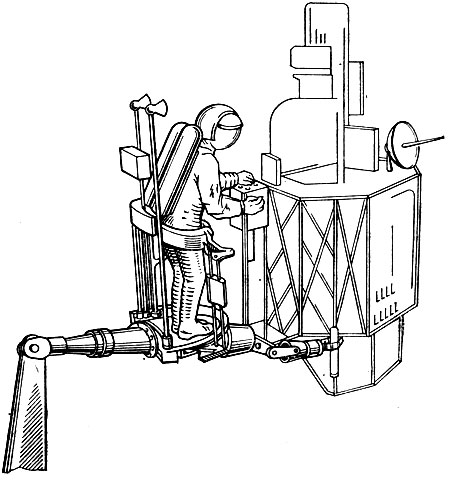
Рис. 4.14. Космическая монтажная площадка
Свободно маневрирующие аппараты могут размещаться на открытых платформах (рис. 4.13), монтажных площадках, доставляемых к объекту обслуживания (рис. 4.14), автономном космическом аппарате, имеющем систему жизнеобеспечения (рис. 4.15). В подобном аппарате космонавт-оператор находится в герметичной кабине и выполняет всю необходимую работу вне корабля при помощи манипуляторов. На аппаратах такого типа кроме рабочих манипуляторов должны быть предусмотрены швартовочные устройства, предназначенные для гашения скорости и демпфирования ударов при стыковке с объектом работ, а также для создания с ним жесткой связи. В этом случае контроль за работой осуществляется с помощью телевизионной системы или непосредственно через иллюминаторы.
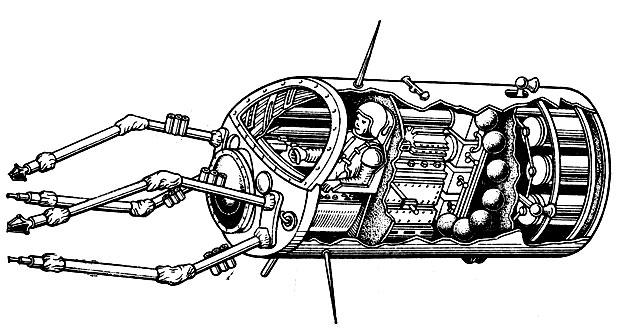
Рис. 4.15. Автономный космический аппарат, оснащенный манипуляционным устройством
На открытой платформе обслуживания, оснащенной манипулятором, могут располагаться инструмент, сменные модули и блоки, предназначенные для замены устаревших и отработавших свой ресурс элементов. Такие платформы позволяют увеличить время проведения работ и повысить эффективность использования робота.
С помощью манипуляционных роботов в космическом пространстве можно выполнять следующие технологические операции.
- Транспортировку, установку, перемещение и переориентацию объектов (таких, как полезные нагрузки, оборудование, конструкционные элементы, различные материалы и пилотируемые рабочие посты).
- Центрирование и подгонку оборудования (телекамер, рефлекторов, лазерных котировочных устройств и т. д.), которое можно устанавливать в кистевом узле захвата манипулятора.
- Соединение и отсоединение элементов (конструкционных элементов, электрических разъемов, фитингов и т. д.).
- Развертывание и раскрытие аппаратуры. Конструкции, развертываемые с помощью манипуляционных роботов, будут более легкими и надежными по сравнению с конструкциями, имеющими собственную систему развертывания.
- Дистанционное наблюдение и освещение. Устанавливаемые на манипуляторе телекамеры и осветительные устройства можно использовать для дистанционного наблюдения и освещения.
- Особые и незапланированные работы, выполняемые космонавтами при чрезвычайных обстоятельствах (например, остановка вращения космического корабля, принудительная транспортировка к месту ремонта и т. д.).
Анализ этих операций приводит к необходимости разработки и создания серии космических роботов и робототехнических систем. Принцип их построения зависит от вида объектов, выполняемых ими операции, а в некоторых случаях и от возможности совместной работы роботов и космонавтов в открытом космосе. Необходимо также учитывать специфику работы космических роботов и прежде всего наличие глубокого вакуума.
Специфика космических роботов и многообразие решаемых ими задач предъявляют весьма высокие требования к обеспечению наиболее эффективного выполнения заданных (а в некоторых случаях непредвиденных) операций и созданию максимальных удобств при работе оператору. Первое требование связано с рациональным выбором кинематической и конструктивной схем исполнительных устройств, энергетических и динамических характеристик, параметров рабочей зоны, алгоритмов управления и т. п. Второе требование обеспечивается выбором метода управления, конструктивного исполнения задающих устройств, повышением эффективности визуальных устройств и средств отображения информации о ходе выполнения операций и контролируемых параметрах системы. При этом рабочее место оператора в совокупности с органами управления и индикации должно отвечать эргономическим требованиям.
Практически любая операция может быть выполнена роботом при использовании различных методов управления. Задача состоит в том, чтобы выбрать такой метод управления, который позволил бы выполнить ту или иную операцию или класс операций наиболее эффективно - с наименьшей затратой времени и с большим удобством для оператора. В этом отношении методы управления могут подразделяться в зависимости от вида выполняемых операций.
При выполнении транспортных операций, перемещения инструмента или объекта работ в рабочей зоне можно применить метод управления по вектору скорости, позиционный или позиционно-скоростной, т. е. методы, не требующие информации на стороне оператора о силах и моментах, развиваемых исполнительными устройствами.
Основным алгоритмом указанных методов управления является формирование с помощью задающих устройств и ЭВМ соответственно вектора скорости перемещения и вектора положения захвата, а также их комбинацию при позиционно-скоростном методе.
При сборочных операциях и работе со связанными объектами целесообразнее использовать методы управления, обеспечивающие оператора информацией о развиваемых при этом силах и моментах, а также позволяющих управлять ими. К таким методам следует отнести прежде всего копирующий метод управления с отражением сил и моментов, позволяющий реализовать практически все режимы работы и обеспечивающий выполнение всего спектра необходимых операций.
Однако недостатком такого метода управления, ограничивающим использование его в космосе, является относительно большой объем зоны работы задающих устройств. Этот класс операций наиболее рационально выполнять при использовании позиционных систем управления с отражением сил и моментов, методов управления по вектору силы, а также моментно-скоростных систем одностороннего и двустороннего действия. При этом, как правило, в качестве задающих устройств используют рукоятки малых перемещений (что очень важно для космических систем), а формирование управляющих сигналов осуществляют с помощью специальных вычислителей или бортовой ЭВМ.
К наиболее широкой группе работ относятся заранее известные операции, связанные с объектами, строго координированными относительно базы крепления исполнительных устройств, или их положение с высокой степенью точности может быть заранее рассчитано (замена инструмента, смена научных и рабочих блоков космического объекта, выполнение операций по обслуживанию технологических модулей и т. п.). Такие операции могут с успехом выполняться мани-пуляционными роботами в автоматических режимах с использованием всего арсенала указанных выше методов управления при обучении робота. В этом случае всецело используются возможности бортовой ЭВМ или ЭВМ центра управления.
При управлении космическими манипуляционными роботами с больших расстояний существенное влияние на динамику систем управления может оказывать запаздывание в каналах радиосвязи и телевидения. Опыты показали, что при запаздывании более 0,5 с операторы переходят на новый режим управления типа движение- ожидание. Человек-оператор после каждого дискретного действия ожидает результат, а затем производит и выполняет следующие шаги. Такое управление называют шаговым управлением.
Наличие запаздывания в каналах связи и широкий диапазон выполняемых операций определили необходимость разработки интерактивных роботов. Возможная структурная схема космического интерактивного робота показана на рис. 4.16. Она состоит из задающей части, каналов связи и исполнительной части.
Подсистема индикации и управления обеспечивает необходимое взаимодействие оператора с системами манипулятора. Она включает в себя индикаторы и органы управления, обеспечивающие контроль, настройку, управление манипулятором как в штатных, так и в аварийных режимах. С помощью пульта выдаются исходные управляющие сигналы и отображающая информация.
Система управления включает в себя устройства сопряжения, электронные устройства и ЭВМ с программным обеспечением. Устройства сопряжения выполняют обмен информацией между ЭВМ, подсистемой индикации и управления и электронными устройствами; реализуют логическую последовательность операций, выполняемых инструментом в автоматическом режиме; формируют данные в соответствии с требованиями ЭВМ, подсистемы индикации и управления и электронных устройств; обеспечивают функционирование встроенных средств контроля.
Таким образом, интерактивные системы управления позволяют использовать наиболее подходящий для данных условий режим управления. Очевидно, что такая система должна обладать возможностью менять не только свои параметры, но и структуру управляющей и исполнительной частей, т. е производить реконфигурацию. Последнюю осуществляют вручную или автоматически (при наличии алгоритма выбора структуры).
Кроме функции подготовки плана управления, собственно управления и реконфигурации структуры системы управления бортовая ЭВМ выполняет функции контроля за правильностью работы блоков и узлов манипулятора и его системы управления, диагностики отказов, подключения резервных блоков и выдачи сообщений о работе системы в целом. Это существенно повышает надежность и позволяет значительно снизить вероятность возникновения аварийных ситуаций. Очевидно, что для обеспечения работоспособности такого комплекса бортовая ЭВМ должна иметь соответствующую память и достаточно высокое быстродействие.
Система управления интерактивных роботов характеризуется активным взаимодействием человека-оператора с ЭВМ в процессе управления, причем часть операций производится роботом самостоятельно в автоматическом режиме. Интерактивные роботы должны получать информацию об обстановке, свойствах среды и расположении манипулятора и предметов.
Для исследования и освоения подводного пространства также создаются дистанционно управляемые манипуляционные роботы, развитие которых происходит по двум направлениям:
- океанические, гидрогеологические и гидробиологические исследования морей и океанов;
- промышленное освоение минеральных, энергетических и пищевых ресурсов Мирового океана.
По мере интенсификации освоения подводного пространства все большее значение приобретают способы и средства, позволяющие проводить работы и исследования непосредственно в глубинах морей и океанов.
Основным видом технических средств, позволяющих проводить широкий круг разнообразных работ в подводном пространстве, являются глубоководные аппараты, оснащенные манипуляторами - подводные роботы.
Практически все подводные манипуляторы имеют дистанционное или дистанционно-автоматическое управление, которое может осуществляться человеком-оператором, находящимся на борту обитаемого аппарата или на пункте судна (станции) обеспечения управления необитаемого подводного аппарата.
Необитаемые аппараты, оснащенные манипуляционными устройствами, специализированы на проведение ограниченного круга исследовательских и подводно-технических работ с большей автономностью и длительностью выполнения по сравнению с обитаемыми подводными аппаратами. Поэтому для необитаемых подводных аппаратов с манипуляционными устройствами наиболее предпочтительно дистанционно-автоматическое управление с минимально возможным участием человека в процессе выполнения работ.
Обитаемым аппаратам более свойственны функции исследовательских и рабочих аппаратов универсального назначения, имеющих ограниченное время пребывания в подводных условиях и требующих непосредственного участия человека-оператора в управлении манипуляционным механизмом в недетерминированных условиях внешней среды.
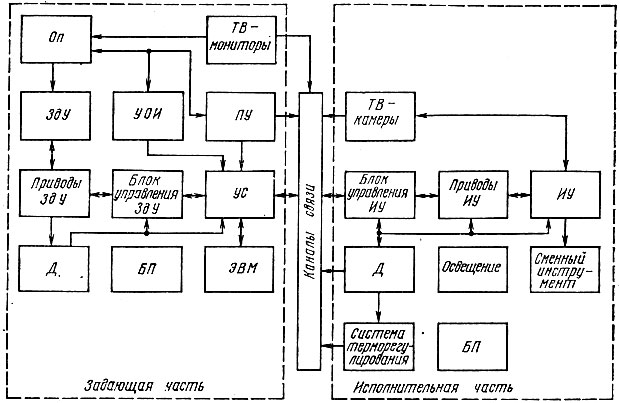
Рис. 4.16. Структурная схема космического интерактивного робота: ЗдУ - задающее устройство; УОИ - устройство отображения информации; ПУ - пульт управления; БС - блок сопряжения; ИУ - исполнительное устройство; БП - блок питания
Наиболее специфичными требованиями, предъявляемыми к манипуляторам подводных аппаратов и системам их управления, являются:
- минимизация масс и габаритных размеров задающего устройства манипулятора, расположенного в ограниченном пространстве обитаемого отсека аппарата;
- ограниченная энергоемкость источников питания и вытекающая из этого необходимость уменьшения энергопотребления систем;
- обеспечение максимально возможной естественности и удобства длительной работы оператора в сложной обстановке подводного пространства.
Исполнительные устройства манипуляторов, устанавливаемых на внешней стороне корпуса глубоководного аппарата, должны обладать достаточно большой грузоподъемностью и оснащаться по каждой степени подвижности электрогидравлическими приводами, которые являются наиболее подходящими для действий в подводной среде. Специальное устройство компенсации внешних давлений обеспечивает его надежную работу на больших глубинах.
Очевидно, что создание задающих устройств, расположенных внутри обитаемых аппаратов, требует использования только электрических элементов. Это определяется их большей надежностью, простотой эксплуатации и малыми габаритными размерами.
При управлении манипуляторами подводных аппаратов можно использовать все методы дистанционного управления. Однако, для обитаемых аппаратов наибольшее применение нашли следующие методы: командный - для управления с помощью мнемонической рукоятки, полуавтоматический - для управления по скорости и по положению и, наконец, позиционно-скоростного управления. При выполнении монтажно-сборочных, ремонтных, аварийно-спасательных и других подводно-технических работ, связанных с необходимостью взаимодействия с другими объектами, предпочтителен метод моментно-скоростного управления. Особенно важно использование данного метода при работе с манипуляторами подводного аппарата в режиме его зависания или движения над объектом работ. В этом случае необходимо применение только копирующих манипуляторов, оснащенных обратимыми системами, или манипуляторов с полуавтоматической системой моментно-скоростного управления с отражением усилий.
Для подводного обитаемого аппарата применяют манипуляторы с полуавтоматическим управлением с использованием бортовой ЭВМ, что значительно облегчает действия оператора и повышает эффективность его работы.
Системы управления подводных роботов, оснащенных манипуляционными устройствами, включают посты управления, расположенные на судне обеспечения либо в наземной станции.
Посты управления имеют задающие устройства, предназначенные для формирования управляющих воздействий на манипулятор, а также системы и приборы отображения информации об условиях в рабочей зоне.
Связь поста управления с подводным роботом осуществляется по специальному трос-кабелю или с помощью акустических средств. При этом желательна двусторонняя передача информации по линиям связи, что приводит к необходимости уплотнения каналов связи.
Подводный робот может иметь также свою автономную систему управления, действующую в автоматическом режиме при заранее заданных программах выполнения отдельных операций.
Таким образом, характерной особенностью создания систем управления подводными роботами является сочетание интеллекта человека с последовательно усложняемым и совершенствуемым искусственным интеллектом робота в общей системе человек-машина.
Дальнейшее совершенствование систем управления подводных роботов может идти по пути повышения уровня автоматизации работы оператора за счет усложнения языка общения человека и робота, т. е. использования элементов искусственного интеллекта и принципов автоматического адаптивного управления с целью повышения автономности действий аппарата в подводной среде.
Для дистанционного управления манипуляторами телеуправляемых аппаратов возможно использование принципа супервизорного управления [36, 78]. Оператор, находящийся на судне или наземном пункте, управляет действиями робота в режиме целеуказаний и включения программ выполнения элементарных операций. При этом оператор разбивает всю исходную задачу на последовательность элементарных операций, каждая из которых может быть автономно выполнена исполнительной частью робота.
Отдельной элементарной операции присваивается типовая команда, которая должна быть достаточно проста. Комплекс типовых команд обеспечивает координированную работу различных систем робота. Сам выбор типовых команд определяется характером работ, на которые ориентирован робот, т. е. они должны быть:
- универсальны, т. е. одни и те же команды могут быть использованы в разных комбинациях и последовательности при выполнении самых разнообразных работ;
- не слишком элементарны, чтобы не загружать оператора необходимостью частого их включения и определять как цель, так и способ достижения поставленной цели.
Супервизорный контур управления манипуляционным роботом включает дисплеи для наиболее эффективного восприятия человеком-оператором информации, необходимой для принятия решения и включения программы действий.
Переход к работе человека-оператора в режим супервизорного управления является существенным шагом в облегчении его деятельности, т. е: переход на более высокий интеллектуальный уровень управления не только подводными роботами; но и вообще робото-техническими системами.
Одной из важнейших сфер применения дистанционно управляемых манипуляционных устройств является их использование в условиях радиационных излучений, исключающих возможность присутствия человека в зонах выполнения операций. Перспективной областью применения манипуляционных устройств с дистанционным управлением является термоядерная энергетика, требующая использования самых современных достижений в области робототехники и систем управления с использованием информационной вычислительной техники, в том числе микропроцессорных систем.
Отличительной особенностью обслуживания атомных и термоядерных энергетических установок является комплексный характер осуществляемых технологических операций. Выполнение большого числа сложных и взаимосвязанных операций по демонтажу оборудования, замена и ремонт отдельных устройств и блоков - все это нельзя осуществить без использования специального робототехнического комплекса. Разработку комплекса выполняют в процессе проектирования самой установки, поскольку конструктивные схемы мест обслуживания основного и вспомогательного оборудования должны быть взаимоувязаны (рис. 4.17).
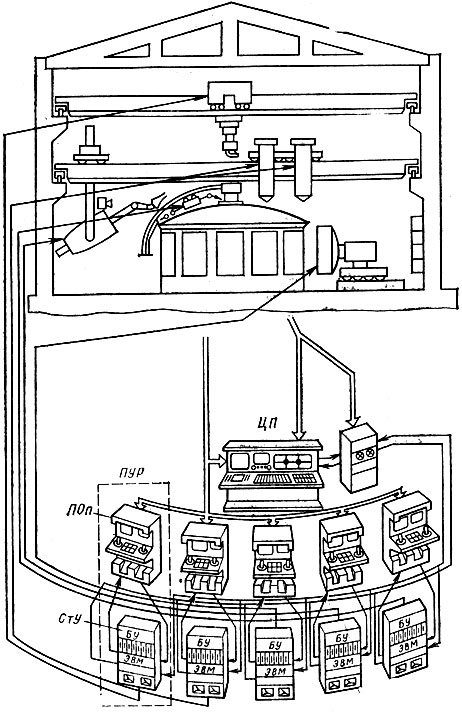
Рис. 4.17. Робототехнический комплекс для обслуживания атомных (ядерных) и термоядерных установок: ПУР - пост управления робота; ЦП - центральный пост; СтУ - стойка управления; ПО - пульт оператора
В качестве примера рассмотрим разработанную в МВТУ имени Н. Э. Баумана систему обслуживания установки типа Токамак. Для таких термоядерных установок принят модульный принцип построения (рис. 4.18).
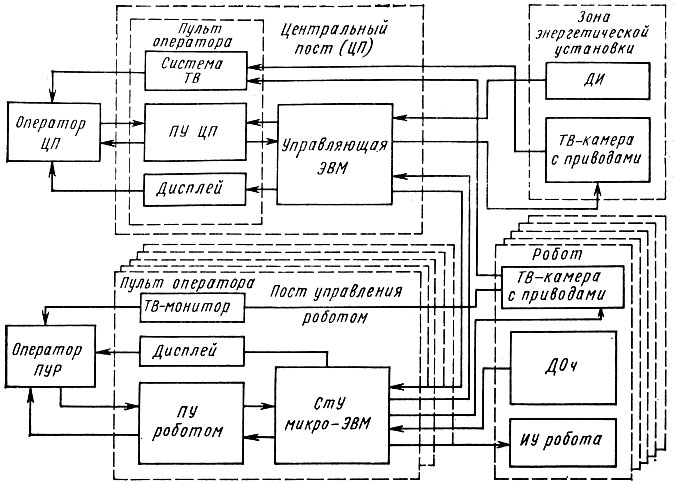
Рис. 4.18. Структурная схема управления робототехническим комплексом: ДИ - датчик информации; СтУ - стойка управления
Наличие радиационной опасности и сильных магнитных полей определило необходимость комплексной автоматизации всех работ по обслуживанию и ремонту установки, полностью исключающей присутствие человека в реакторном зале. Только с использованием робототехнического комплекса, включающего в свой состав группу манипуляционных роботов различного функционального назначения, управляемых из единого центра, была успешно решена данная проблема. При этом робототехнический комплекс должен содержать:
- исполнительные манипуляционные устройства, расположенные в зоне выполняемых работ и снабженные различными информационными датчиками;
- центр управления робототехнического комплекса, обеспечивающий общую организацию управления и управление отдельными исполнительными манипуляционными устройствами.
Организация эффективной работы сложного комплекса робототехнических устройств немыслима без создания высокоорганизованной и гибкой структуры управления, обеспечивающей надежное выполнение требуемых операций.
Управление манипуляционными роботами, входящими в состав роботехнического комплекса и выполняющими необходимые технологические операции в рабочих зонах установки, осуществляется дистанционно из единого центра управления (см. рис. 4.17), с помощью которого обеспечивается общая организация управления. Он включает в себя центральный пост управления (ЦП) и посты управления роботов (ПУР).
Центральный пост управления предназначен для общей координации работ комплекса в ходе обслуживания и ремонта термоядерной установки, а также сбора информации об условиях эксплуатации манипуляционных роботов. Обработку, анализ и хранение поступающей информации обеспечивает ЭВМ центрального поста, которая входит в общую вычислительную систему робототехнического комплекса и обеспечивает сбор, обработку, хранение, вывод на дисплей и распределение информации между подсистемами комплекса.
Основной принцип, принятый при разработке робототехнического комплекса для обеспечения его надежной работы, заключается в том, что при выходе из строя одного из манипуляционных устройств обслуживание может осуществляться другим роботом. При этом ЭВМ ЦП автоматически осуществляет процедуру реконструкции всей системы управления робототехническим комплексом или ее отдельных частей, предполагая принятие окончательного решения оператором центрального поста. В состав центрального поста входят:
- система телевизионных мониторов для визуального наблюдения за зонами обслуживания отдельными манипуляционными роботами, а также общее обозрение установки;
- система графических и алфавитных дисплеев для обеспечения оператора информацией о работе робототехнического комплекса;
- дублирующие органы управления манипуляционными роботами.
Посты управления манипуляционных роботов предназначены для оперативного управления работой каждого из исполнительных устройств, находящихся в эксплуатационной зоне. Их количество соответствует числу манипуляционных роботов.
Пост управления робота имеет: пульт оператора (ПО) и стойку управления роботом (СУ).
В состав пульта оператора входят:
- телевизионный монитор для получения видеоинформации о рабочей зоне робота и контроля за ходом выполнения операций в автоматическом и полуавтоматическом режимах;
- дисплей для получения отображения информации о работе робота и о выполнении решений центрального поста, а также отображения необходимой информации о работе робототехнического комплекса;
- пульт управления роботом для общения оператора со всеми подсистемами поста управления, включая управляющую ЭВМ, а также для получения информации о функционировании робота, кроме того, с пульта осуществляется управление как приводами ориентации телекамер для необходимой зоны обзора работы робота, так и приводами трансфокаторов.
Стойка управления включает:
- электронную аппаратуру блоков управления отдельными приводами робота и приводами соответствующих телекамер, их количество соответствует числу степеней подвижности робота и телекамер;
- блоки управления функционированием датчиков;
- блоки питания;
- управляющую ЭВМ, предназначенную для формирования сигналов управления приводами исполнительного устройства и телекамер, диагностики отказов отдельных элементов систем управления, обеспечения работы дисплея, переработки информации о функционировании робота, выработки решений при формализованных ситуациях, выдачи информации о работе робота на ЦП.
В рабочей зоне размещена лишь та аппаратура, которая должна непосредственно там функционировать. В ее состав входят:
- исполнительное устройство робота;
- необходимые рабочие инструменты, используемые роботом;
- датчики состояния и очувствления робота;
- датчики параметров среды в рабочей зоне;
- датчики качества контроля выполнения операций роботом;
- телевизионные камеры.
Особенностью системы управления робота является возможность проведения работы в различных режимах, наиболее эффективных в каждой из конкретных ситуаций. Все элементы операций, поддающиеся формализации и программированию (в том числе с простейшей адаптацией), особенно часто повторяющиеся, выполняются роботом в автоматическом режиме с управлением от ЭВМ, оператор в этом случае осуществляет наблюдение за действиями робота. При этом программа для автоматического режима может задаваться в координатах рабочей зоны или вводиться путем обучения, когда оператор с помощью задающих устройств перемещает в дистанционном режиме исполнительные устройства, движения которых запоминаются для последующего многократного выполнения в автоматическом режиме.
Запрограммированные элементы операций могут сочетаться в различных комбинациях друг с другом. Необходимая последовательность их выполнения задается каждый раз программным путем или в супервизорном режиме, когда оператор на пульте управления осуществляет сам переключение программ или дает целеуказательные команды, вызывающие целый цикл запрограммированных операций. Например, переместиться роботу из начального положения, взять инструмент и прибыть в определенную точку рабочей зоны; затем оператор включает программу автоматического проведения роботом основной операции и т. д.
Автоматическое управление исполнительным устройством манипуляционного робота осуществляется от блока программного управления, содержащего набор подпрограмм для выполнения простейших операций. Такими операциями могут быть перемещение захвата в определенную точку, смена инструмента, взятие или складирование деталей и т. п. При необходимости используются гибкие программы с простейшей адаптацией по сигналам отдатчиков очувствления захвата. Наборы элементарных подпрограмм объединяют в определенные комплексы при супервизорном управлении, когда оператор с помощью средств целеуказания обеспечивает формирования команд, формализованных по определенному виду работ при обслуживании установки.
Автоматический и дистанционный режимы управления действиями робота являются основными. Однако в системе предусмотрена возможность и комбинированного управления с непосредственным участием оператора в процессе управления движением манипулятора.
Использование подобной системы комбинированного управления придает манипуляционной робототехнической системе широкие функциональные возможности.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'