6.4. Технические средства для штабелирования грузов и их комплектования в зоне хранения
Помимо традиционных средств штабелирования в настоящее время находят применение специализированные краны-штабелеры, предназначенные для складирования определенных грузов. Их выполняют по жесткой кинематической схеме с контролируемым перемещением конечного элемента - захвата. Они оснащены информационными датчиками. Эти устройства снабжены системой управления, обеспечивающей выполнение операций как при непосредственном визуальном контроле, так и при дистанционном управлении или в автоматическом режиме.
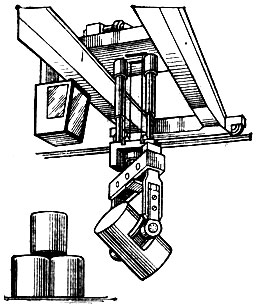
Рис. 6.14. Штабелер
При обслуживании, например, складов рулонов бумаги используют дистанционно управляемое устройство, представляющее собой штабелер (рис. 6.14), на крановой тележке которого установлены две телескопические колонны, обеспечивающие жесткую связь между горизонтальной тележкой и подъемной траверсой. Последняя оборудована механизмом поворота и захватным устройством.
Для обслуживания складов используется кран-штабелер (рис. 6.15), оснащенный грузоподъемной кареткой, перемещающейся вдоль вертикальной колонны, и захватным устройством для захватывания длинномерных грузов. Следует отметить, что конструктивно выполнение захватных устройств для фиксации и ориентирования перемещаемых крупногабаритных грузов достаточно разнообразно (рис. 6. 16) [8].
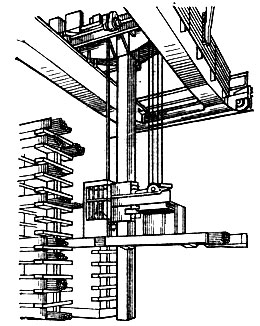
Рис. 6.15. Кран-штабелер
Наибольший экономический эффект дают краны с контролируемым захватыванием и перемещением груза, а также специализированные краны-штабелеры на складах с автоматическим управлением. Целый ряд функциональных особенностей этих устройств позволяет осуществить автоматизацию их управления в складских системах (рис. 6.17), включающих группу кранов-штабелеров, объединенных единой транспортной линией. Система автоматического управления манипулирующими устройствами и транспортными линиями осуществляет управление приводами, контроль положения груза при движении, а также обратную связь исполнительных механизмов с центральным пультом управления. На крупных складах, насчитывающих десятки тысяч наименований грузов и стеллажных ячеек, управление складскими операциями, учет хранимых грузов, а также оперативная информация производятся с помощью ЭВМ.
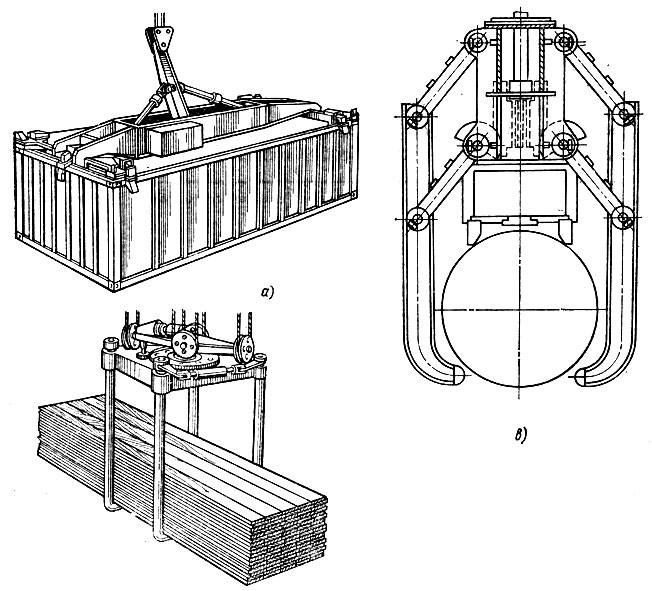
Рис. 6.16. Примеры захватных устройств крупногабаритных грузов:
При комплексной автоматизации складов, когда механизмы по переработке грузов снабжены автоматической системой, управления, микропроцессорная техника непосредственно управляет работой всей транспортной системы, включающей автоматические краны-штабелеры и линии загрузки и разгрузки. В этих случаях автоматические системы управления связаны прямыми каналами с управляющей ЭВМ, оператор лишь вводит информацию о каждом вновь поступающем на склад грузе. При этом ЭВМ осуществляет контроль за движением груза, определяет его место на стеллажах, время и назначение дальнейшего следования и выдает по мере необходимости команды соответствующим исполнительным механизмам.
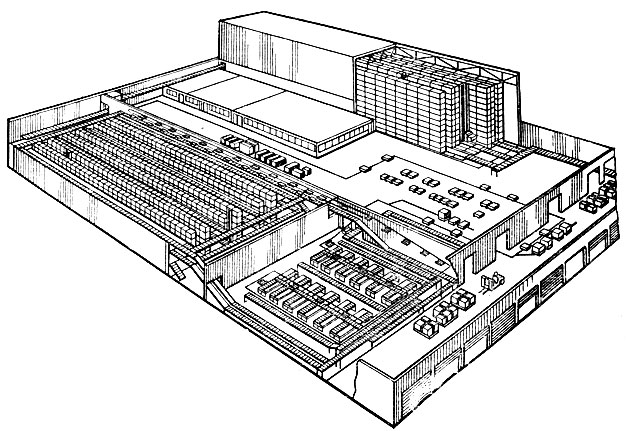
Рис. 6.17. Складская система с группой кранов-штабелеров, объединенных единой транспортной линией
Пример системы автоматизированного складского хозяйства для хранения и обработки штучных грузов на поддонах фирмы "Коне" (Финляндия) показан на рис. 6.18. Склад вмещает пять тысяч пакетов. Основными механизмами на складе являются краны-штабелеры. Склад состоит из пяти основных секций: А, Б, В, Г и Д. В секции А складируются в основном массовые грузы. В секции Б размещаются пакеты временного хранения. В секции В хранятся не полностью укомплектованные поддоны. Секция Г предназначена для полностью укомплектованных изделий. В секции Д поступающие грузы открывают и формируют в пакеты.
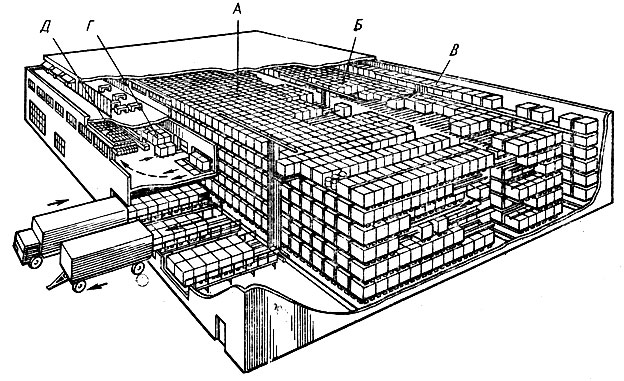
Рис. 6.18. Пример системы автоматизированного складского хозяйства фирмы 'Коне' (Финляндия)
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'