6.3. Технические средства для перегрузки и складирования крупнотоннажных грузов и контейнеров
Развитие автоматизации и механизации различных отраслей народного хозяйства предопределило создание новых конструкций подъемно-транспортного оборудования, имеющего большую производительность и выполняющего широкую номенклатуру операций с грузами в автоматическом или полуавтоматическом режиме без помощи подсобных рабочих [27].
Краны с жестким подвесом груза являются по существу кранами-манипуляторами, а оснащение их современными системами автоматического управления и сенсорными устройствами позволяет использовать эти краны в полностью автоматизированных робототехнических комплексах.
Подобные устройства способны автономно перегружать и транспортировать грузы, уложенные на поддоны, в контейнеры, в специальную тару или увязанные в пакеты.
Грузы, перерабатываемые кранами-манипуляторами при автоматическом или дистанционном управлении, могут иметь нормальную или высокую температуру, или обладать повышенной чувствительностью к давлению и перегрузкам.
Следует отметить, что для конструктивного выполнения основных несущих элементов кранов-манипуляторов можно использовать элементы кранов общего назначения, выпускаемые промышленностью. При этом все многообразие кранов с жестким и пространственным подвесом груза может базироваться на достаточно ограниченном числе унифицированных элементов.
Краны с жестким подвесом груза по их конструктивному исполнению можно классифицировать, как показано на рис. 6. 10.
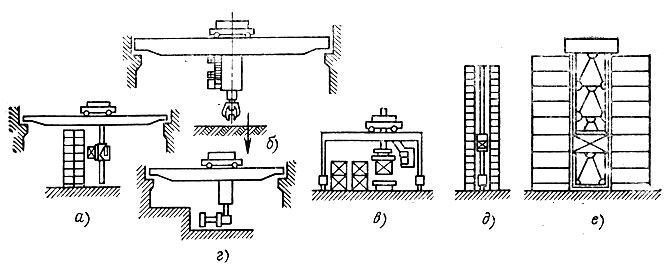
Рис. 6.10. Классификация кранов с жестким подвесом грузов: а - мостовые краны-штабелеры; б - металлургические краны; в - козловые контейнерные краны-штабелеры; г - краны-манипуляторы; д - стеллажные краны; е - краны для складирования контейнеров ИСО
Конструктивное выполнение грузоподъемных устройств с жестким подвесом груза можно рассмотреть на примере контейнерного крана (рис. 6. 11). Этот кран имеет шесть независимых рабочих движений, которые обеспечивают требуемую установку и ориентацию груза на транспортную платформу, в том числе наклон и поворот контейнеров. В пролете крана находятся три железнодорожные линии и один автомобильный проезд. Кран рассчитан на переработку значительных потоков контейнеров массой брутто до 30 т (длиной до 12,2 м).
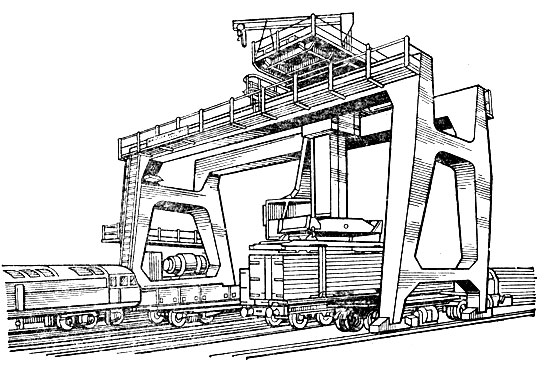
Рис. 6.11. Контейнерный кран с жестким подвесом грузов
Кран представляет собой металлоконструкцию коробчатого сечения, на которой смонтировано грузоподъемное устройство, состоящее в основном из двух частей: тележки и поворотной платформы с оборудованием (рис. 6. 12). В центральной части поворотной плат-формы установлена вертикальная ферма. С внешней стороны крепится кронштейн с кабиной управления. Внутри фермы смонтирована колонна продольного перемещения, на нижнем конце которой находится устройство для захвата грузов или контейнеров. Управление этим устройством осуществляется с помощью пульта (рис. 6. 13).
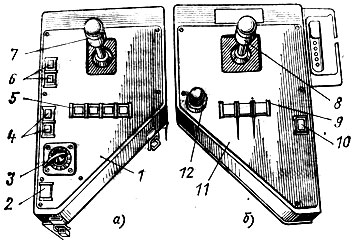
Рис. 6.12. Контейнерный кран с поворотной платформой
На левой стойке 1 (рис. 6.13, а) расположена рукоятка 7, с помощью которой управляют движением тележки, наклоном и поворотом захвата. Кроме того, на левой стойке установлены, двухпозиционный переключатель 3 (для различных типов контейнеров); кнопочная станция 5, управляющая головками захватного устройства на определенный размер (кнопки 6 - поворотом захватных головок, кнопки 2, 4 - захватом для контейнеров).
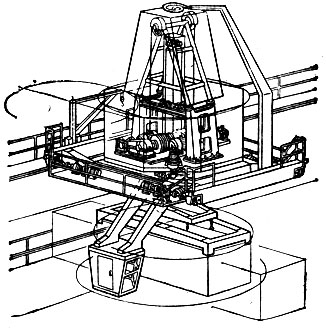
Рис. 6.13. Пульт управления
На правой стойке 11 (рис. 6.13, б) расположена рукоятка 8, управляющая движением всего крана и подъемом груза. На ней также установлены кнопки 9 и 10 пуска энергосиловых установок крана и кнопка 12 для аварийной установки. Само захватное устройство снабжено сенсорными приборами со световой индикацией, свидетельствующей о правильности и надежности захвата груза.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'