7.2. Возможности использования РТК в производстве химических волокон
Химические волокна могут быть получены двумя способами: формованием из прядильного раствора нити с последующей отделкой и суш кой волокна, плавлением полимеров и формованием волокна из расплава с последующей отделкой и сушкой волокна.
В настоящее время в производстве химических волокон всех типов достигнуты значительные успехи в автоматизации основных технологических операций. Существуют и действуют сложные системы автоматики по поддержанию уровня, концентрации и температуры растворов и расплавов, механизирована и автоматизирована подача крошки в плавильно-формовочные машины и растворов в оборудование для получения химических волокон.
Основными особенностями автоматизации производства химических волокон являются:
- многопереходность технологических процессов;
- недостаточная изученность процессов протекания химических и физических процессов в аппаратах;
- сравнительно слабая механизация и автоматизация вспомогательных процессов при наличии трудоемких операций по обслуживанию машин для формирования и приема синтетических нитей.
Большинство межоперационных технологических переходов в производстве химических волокон механизировано с помощью пневмотранспорта и механических транспортеров. Основная доля ручных операций используется на конечном этапе формирования и отделки волокна.
К простым операциям в производстве химических волокон можно отнести:
- съем и установку паковок с машин для получения волокна без присучки нити;
- укладку наработанных паковок на транспортер или тележку;
- укладку наработанных паковок в коробки.
Сложные операции в производстве химических волокон включают:
- автоматическую ликвидацию обрывов нити на выходе машин для формирования химических волокон;
- обслуживание участка прессования и упаковки химических волокон в мягкую тару;
- перезаправку рабочих мест на машинах для получения нити;
- распаковку кип сырья (целлюлозы) и освобождение их от тары;
- транспортные операции внутри цехов.
Отдельную группу простых и сложных операций производства химических волокон составляют операции в прядильных и ткацких цехах производства химических волокон.
Основной парк современных машин для формования и приемки синтетических нитей составляют машины МФ-600-КШ-24, МФ-600-КШ-24М, МФ1-1000-КР18.
Технологический процесс, начиная от загрузки бункеров и поддержания технологических параметров в шнековом расплавителе и кончая дорегулированием температуры и кондиционированием воздуха в обдувочных шахтах, полностью автоматизирован. Наиболее узким звеном в производстве волокна является обслуживание прием-но-намоточной части машины. В функции работницы, обслуживающей приемно-намоточные механизмы, входят следующие основные технологические операции:
- первоначальная заправка приемно-намоточного рабочего места;
- перезаправка приемно-намоточного рабочего места;
- съем наработанных паковок и укладка их на устройство транспортировки в прядильный цех.
Значительная часть рабочего времени работницы уходит на операцию съема наработанных паковок. Каждой работнице в течение смены приходится вручную переносить и укладывать на транспортные тележки до 1,5 т готовой продукции при массе паковки 8-12 кг. Если учесть при этом повышенную температуру, загазованность и уровень шума на участке формования, то необходимость внедрения роботизированных комплексов становится очевидной.
Масса паковок и скорости формования химических волокон из расплава и раствора позволяет использовать серийно разработанные роботы-манипуляторы с величиной горизонтального перемещения до 500 мм, вертикального перемещения до 1000 мм, грузоподъемностью 15 кг и скоростями перемещения руки манипулятора по вертикали и горизонтали 0,7-1,0 м/с. Например, для данной операции, при условии дополнительной оснастки может быть использован двурукий робот-манипулятор модели 3388, изготовляемый в г. Тольятти на заводе ВАЗ.
В настоящее время начинают широко использоваться специализированные шпулярники для механизации процесса съема и транспортировки наработанных паковок на машинах для получения химических волокон. Недостатком всех шпулярников, имеющих число входных паковок, равное числу рабочих мест машины, является потеря рабочего времени на перезаправку шпулярника, что снижает производительность машины.
На Ленинградском машиностроительном объединении имени К. Маркса разработан и изготовлен робот-шпулярник для механизации участка с наиболее трудоемкими операциями. С приемно-намоточной части машины для формования и приемки синтетических нитей наработанные паковки пневмосталкивателем бобинодержателя передаются на паковкодержатели манипулятора-съемщика, который перемещается вдоль машины. С манипулятора паковки переталкиваются на транспортные тележки, перемещаемые по подвесным рельсовым путям. Транспортные тележки с паковками накапливаются в камере кондиционирования волокна, из которой их направляют к шпулярникам крутильно-вытяжных машин. С паков код держател ей транспортных тележек паковки переталкиваются на паковкодержатели шпулярника.
Робот-шпулярник изображен на рис. 7.3. Он состоит из остова 7, на котором закреплены паковкодержатели 2 с капсулирующей кружкой 12, комплект нитепроводящей гарнитуры 3 и подножки обслуживания 11. Вдоль фронта обслуживания шпулярника установлены подвесные транспортные пути для перемещения транспортных тележек. Число паков код держателей и шаг между ними выбран в соответствии с паковкодержателями транспортных тележек. Остов шпулярника установлен параллельно фронту обслуживания крутильно-вытяжной машины. Кружки, размещенные на шпулярнике, применяются от серийных машин, что способствует унификиции деталей шпулярника. Для установке паковок на шпулярник паковкодержатели оснащены рамками. Нитепроводящая гарнитура установлена в поворотно-фиксированные держатели. При перезаправке шпулярника нитепроводник отводится от кружки.
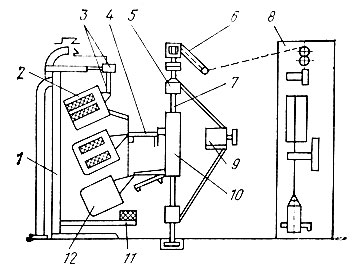
Рис. 7.3. Робот-шпулярник: 1 - остов; 2 - паковкодержатель; 3 - комплект нитепроводящей гарнитуры; 4 - телескопические сталкиватели; 5 - траверсы; 6 - механическая передача; 7 - направляющие трубы; 8 - формовочная машина; 9 - привод; 10 - каретка; 11 - подножка обслуживания; 12 - капсулирующая кружка
Нитепроводники для передачи нити к машине выполнены в виде проволочных струн, установленных над транспортными путями параллельно фронту обслуживания машин. Съемщик-манипулятор, перемещающийся вдоль фронта обслуживания шпулярника по подвесным путям, состоит из каретки 10 с закрепленными на ней паковкодержателями с телескопическими сталкивателями 4, направляющих труб 7, траверсы 5, привода 9.
Загрузка стационарного шпулярника производится последовательно с первого по последний вертикальные ряды паковкодержателей. Загрузка производится сталкиванием паковок с паковкодержателей транспортных тележек, подводимых к шпулярнику по подвесным путям.
В случае замены паковки манипулятор-съемщик подводится по подвесным путям к шпулярнику. Паковкодержатели съемщика ориентируются относительно паков код держателя шпулярника. Сталкиватель вводится в отверстие бобины, зуб его захватывает бобину за торец и при обратном переключении сталкивателя паковка устанавливается на паков код держатель манипулятора-съемщика.
Системы автоматизированного съема продукции создаются также совместно с НПО "Химволокно" и ЦНИИКА. Для автоматизированного съема продукции используются автоматический манипулятор для съема паковок с одновременным выполнением таких операций, как отвод нитей, закрепление их на патронах, обрезание нити с началом работы веретена и с применением специального транспорта для приема наработанных паковок и подачи пустых патронов. Использование такой системы позволит снизить трудовые затраты на 60-65 %. Манипулятор рассчитан на одновременный съем паковок со всей секции машины (12 паковок), установку 12 патронов и манипулирование с 12 нитями.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'