8.5. Добыча полезных ископаемых под водой
В последние годы все большее значение приобретают способы добычи полезных ископаемых со дна морей и океанов и особенно в зоне континентального шельфа. Выполнение технологических процессов, связанных с разработкой полезных ископаемых на дне морей и океанов, является тяжелым и опасным физическим трудом. Поэтому очевидна и весьма понятна необходимость создания робототехнических комплексов для работы в погруженном состоянии.
На рис. 8.23 показан подводный робот для землеройных работ под водой на глубине до 500 м [6]. Робот создан на базе бульдозер а-амфибии с дистанционным управлением. Он состоит из понтона, подводного робота, стрел-манипуляторов с гидравлическим приводом, оборудованных захватными устройствами; устройства для бурения грунта, смонтированного в нижней части рамы и установленного на восьми телескопических опорах. Робот оборудован телекамерами.
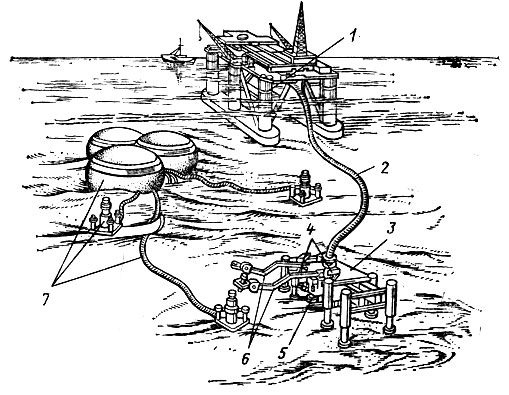
Рис. 8.23. Подводный робот для землеройных работ: 1 - понтон; 2 - кабель; 3 - робот; 4 - телекамеры; 5 - бурильное оборудование; 6 - манипулятор с инструментом; 7 - специальное оборудование
При работе под водой управление рабочими механизмами и энергопитание осуществляются с понтона, на котором установлена вычислительная машина с программным управлением и монитор, позволяющий следить за выполнением всех рабочих операций. Робот можно использовать для вскрышных работ, рытья траншей на дне моря и прокладки в них трубопроводов и кабеля.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'