Введение
Роль автоматизированного электропривода в современных гибких производственных системах исключительно велика. Он является неотъемлемой частью гибких производственных систем и в значительной степени обусловливает их технический уровень.
Приводы станков и промышленных роботов предназначены для преобразования электрической энергии в механическую при заданных параметрах: пути, скорости и ускорения.
Электроприводы выпускаются промышленностью с изменяемой и с неизменяемой частотой вращения вала двигателя. В нашей книге рассматриваются только электроприводы с изменяемой частотой вращения.
По роду регулируемой величины различают регулируемый и следящий электроприводы.
Следящим называется электропривод, в котором угол поворота вала электродвигателя меняется по заданному закону.
Характерная особенность станочного следящего электропривода состоит в том, что его составной частью является регулируемый привод. Поэтому в нашей книге рассматривается вначале регулируемый привод, как наиболее простой.
Электропривод принято называть регулируемым в том случае, если частота вращения вала двигателя меняется по заданному закону.
Электропривод состоит из следующих узлов: двигателя, преобразователя и трансформатора (реактора). Двигатель преобразует электрическую энергию в механическую. Преобразователь, состоящий из силовых элементов и системы управления, формирует напряжение (ток), подаваемое на двигатель. Трансформатор согласует напряжение питающей сети с напряжением двигателя. В зависимости от типа применяемого преобразователя, который может быть тиристорным или транзисторным, различают типы приводов - тиристорные и транзисторные (рис. 1).
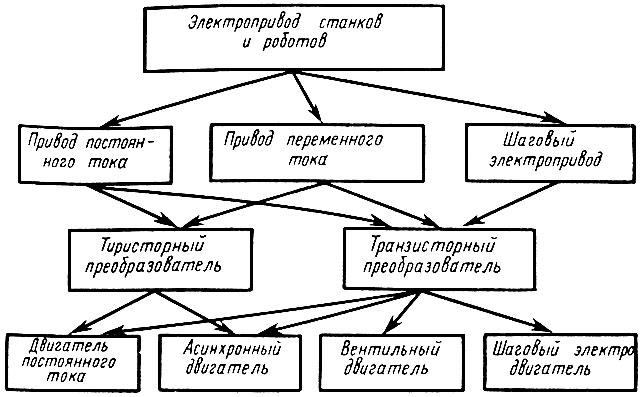
Рис. 1. Электроприводы станков и роботов
В приводах как постоянного, так и переменного тока применяют и тиристорные и транзисторные преобразователи. В приводах постоянного тока тиристорные преобразователи строятся по системе "управляемый выпрямитель". В этом случае преобразователь выполняет две функции: выпрямление напряжения и регулирование его величины.
Тиристорные преобразователи в приводах переменного тока и транзисторные преобразователи как в тех, так и в других приводах строятся по системе "выпрямитель-инвертор". В выпрямителе переменное напряжение преобразуется в постоянное (как правило, неизменного уровня). В инверторе регулируется величина напряжения, подаваемого на двигатель путем изменения соотношения времени подключения двигателя к источнику напряжения и паузы. Преобразователь, построенный по такому принципу, называется широтно-импульсным. Наибольшее распространение получил тиристорный электропривод постоянного тока, имеющий высокую надежность и большую мощность. Однако транзисторные электроприводы, хотя и уступают тиристорным по мощности и надежности, имеют высокие динамические и энергетические показатели. В настоящее время транзисторные электроприводы постоянного тока применяются в весьма ограниченном диапазоне мощностей и в тех случаях, когда они по каким-либо причинам не могут быть заменены тиристорными. Они вытесняются приводами с вентильными или асинхронными двигателями. Применение этих двигателей, а также современной микроэлектроники и микропроцессорной техники позволило создать бесконтактные электроприводы повышенной надежности с техническими характеристиками, превосходящими аналогичные в приводах постоянного тока.
В малогабаритных станках с ЧПУ и специализированных роботах применяют шаговый электропривод. Он отличается широким диапазоном регулирования скорости, высокой точностью и быстродействием при малых габаритах, что позволило отказаться от установки датчиков скорости и положения. Применение шагового двигателя в качестве управляющего элемента в сочетании с гидроусилителем существенно увеличило выходную мощность привода и расширило его область применения. И хотя в новых моделях станков с ЧПУ и роботах эти приводы уже не устанавливают, в эксплуатации находится еще большое количество станков с электрогидравлическим шаговым приводом подачи.
В структуре регулируемого привода отсутствуют УЧПУ и датчик положения. Регулируемый привод применяется как в станках с ЧПУ (в тех случаях, когда необходимо изменять скорость), так и в станках без ЧПУ.
Основную функцию в электроприводе - преобразование электрической энергии в механическую-выполняет электрический двигатель. От параметров электрического двигателя зависит технический уровень электропривода и станка или робота. Требования, предъявляемые к приводам станков с ЧПУ и роботов, не могли выполняться на базе двигателей общепромышленных серий, поэтому для них разработаны специальные электродвигатели различных серий. Эти двигатели отличаются быстродействием, высокой надежностью, малыми габаритными размерами (особенно для роботов), большой перегрузочной способностью и точностью.
К специальным электродвигателям относятся малоинерционные, высокомоментные и вентильные.
Специальные электродвигатели имеют ряд вспомогательных и информационных устройств: тормоз, тахогенератор, датчики перемещения, температуры.
В регулируемый привод кроме силовой части, построенной на тиристорах или транзисторах, входит система управления важнейшими элементами, которой являются регуляторы тока и скорости.
Регуляторы тока и скорости и соответствующие им датчики формируют требуемый закон управления; другие виды датчиков, например датчики температуры, предохраняют элементы привода от выходе из строя.
В следящие электроприводы станков с ЧПУ и в роботах помимо указанных элементов входят датчики перемещения, сигналы которых обрабатываются измерительными преобразователями.
В станкостроении помимо электроприводов, изменяющих скорость или перемещение по заданному закону, существуют электроприводы, изменяющие по требуемому закону различные технологические параметры, такие, как усилие резания, уровень вибрации, момент резания и др. К ним относятся адаптивные электроприводы.
Из приведенного описания следует, что электромеханический привод представляет собой сложное соединение большого числа элементов, охваченных системой обратных связей. Для успешной его эксплуатации все элементы должны быть динамически и информационно согласованы между собой, а также с механической системой станка или промышленного робота.
Введение, части IV. 9 и VI написаны О. П. Михайловым, части I и II - Р. Т. Орловой, части III, IV. 10, IV. 11, V и VII - А. В. Пальцевым.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'