Глава 1. Робототехника и ее значение
§ 1.1. Появление роботов и особенности их устройства
Во второй половине нашего века механизация и автоматизация производства получили особенно интенсивное развитие. Появление новых образцов изделий, новых видов технологии и производственного оборудования, новых принципов организации производства, контрольно-измерительной техники и т. п. пошло небывалыми ранее темпами. Вместе с этим появились и новые профессии рабочих и инженерно-технических работников.
Во многих технологических процессах стало нежелательным непосредственное участие человека: там, например, где автоматика давала либо более точное и однотипное дозирование материалов, либо более быстрое или более качественное выполнение операции, либо там, где подвергалось опасности здоровье человека. В результате успехов механизации и автоматизации технологических участков во всех отраслях промышленности появились совершенные производственные машины и линии, выполняющие основную часть технологического процесса. Но на долю человека оставалось еще очень много ручных операций.
Чисто вспомогательные операции (подать, закрепить, снять, включить, выключить и т. п.) делали человека, образно говоря, "бездумным исполнителем" при автоматизированных машинах, агрегатах, комплексах. По мере совершенствования производственной техники все более и более увеличивалась доля такого рутинного, однообразного, утомляющего ручного труда во многих производственных профессиях. В связи с этим возник ряд новых проблем.
Уровень культуры и образования молодежи - основного источника пополнения рабочих кадров - непрерывно растет, условия жизни улучшаются, жизненные запросы расширяются. Это приходит в противоречие с характером ручного труда многих категорий рабочих, и возникают трудности в найме людей на такие работы. Надо еще иметь в виду, что сложившаяся обстановка усугублялась тем, чти известная часть ручных операций проводилась в заводских цехах около горячих печей, со взрывоопасными предметами, в загазованной или пыльной атмосфере, в условиях сильного шума, была связана с поднятием тяжестей. "Непрестижной" стала и однообразная работа на сборочном конвейере с вынужденным утомляющим темпом.
С другой стороны, наличие промежуточных ручных операций тормозило интенсификацию производства и повышение производительности линий, участков, цехов. Ручные операции оставались во многих случаях не только на вспомогательных, но и на основных технологических операциях (сварка, сборка, окраска, заготовительные операции).
Наконец, и в социальном смысле повышение культуры труда на производстве имеет первостепенное значение.
Во весь рост встала проблема существенного уменьшения доли ручного труда во всех производственных и транспортных операциях, в первую очередь ручного труда, однообразно повторяющегося, утомительного, вредного, и именно в тех технологических процессах, где это больше всего тормозит интенсификацию производства.
Задача автоматизации ручного труда или, как говорят, "переложение ручного труда на плечи машин" оказалась во многих ситуациях трудно выполнимой. Во всяком случае традиционные средства механизации и автоматизации, существовавшие до сих пор, часто были неприменимы. Нужно было создать такие новые машины, которые смогли бы автоматически выполнять сложные движения человеческих рук в процессе трудовой деятельности.
Таким образом, возникла практическая потребность в машинах-роботах, имитирующих действия человека в ручных операциях, как вспомогательных (около станков, литейных, штамповочных и др. машин), так и основных (сварка, сборка, окраска). Вместе с тем на базе электроники, вычислительной и информационной техники, средств управления появилась и реальная возможность создания и заводского изготовления таких машин-роботов и эффективного включения их в состав технологических линий и комплексов.
Промышленный робот в качестве исполнительного устройства имеет манипулятор - механическую руку с несколькими степенями подвижности. Для каждой степени подвижности имеется свой привод (рис. 1.1). Движение всех звеньев манипулятора одновременно по всем степеням подвижности координированно направляется автоматической системой управления. Управление строится таким образом, чтобы расположенный на конце манипулятора схват или инструмент (например, сварочная головка) получил при этом нужное пространственное перемещение подобно движению человеческой руки.
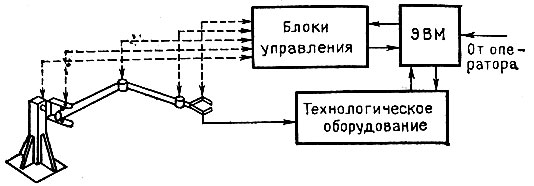
Рис. 1.1. Схема промышленного робота
Система управления роботом действует по определенной программе. Но программу эту можно изменять применительно к различным технологическим операциям. Достаточно легкое перепрограммирование действий робота является отличительной чертой его системы управления. Существуют различные определения понятия "робот". Приведем здесь два определения.
В обобщенном смысле, имея в виду не только промышленные манипуляционные роботы, а и другие их классы, которые будут рассмотрены ниже, можно понятие "робот" определить следующим образом.
Робот - это технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, управляющими и информационными системами, а также средствами решения вычислительно-логических задач.
Другое определение дается специально промышленному роботу (ГОСТ 25686-85).
Промышленный робот - автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций.
К этому определению ГОСТ дает примечание: перепрограммируемость - свойство промышленного робота заменять управляющую программу автоматически или при помощи человека-оператора. К перепрограммированию относится изменение последовательности и (или) значения перемещений по степеням подвижности и управляющих функций с помощью средств управления на пульте устройства управления.
Термин "манипулятор" тот же ГОСТ определяет следующим образом. Манипулятор - управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом. Рабочий орган - составная часть исполнительного устройства промышленного робота для непосредственного выполнения технологических операций и (или) вспомогательных переходов. Примерами рабочего органа служат сварочные клещи, окрасочный пистолет, сборочный инструмент, захватное устройство.
Манипуляторы роботов как многозвенные механизмы могут иметь различные кинематические схемы и совершать движения в различных пространственных системах координат. Рука человека имеет только вращательные узлы (плечо, локоть, кисть). В отличие от схемы человеческой руки, манипулятор может иметь не только повороты звеньев друг относительно друга, но также и поступательные относи-тельные движения. Например, плечо манипулятора может выдвигаться из корпуса робота, некоторые его звенья могут телескопически удлиняться. Если звенья манипулятора имеют только поворотные движения, как в руке человека, то манипулятор называется антропоморфным.
Корпус робота - это корпус машины, он не копирует форму тела человека. "Мозг" робота (управляющая ЭВМ) и органы "чувств" робота (датчики очувствления) помещаются в отдельной стойке либо размещаются на корпусе робота и на самом манипуляторе. Робот только функционально имитирует действия человека при выполнении им ручных производственных операций.
Освобождение человека от непосредственного участия в технологическом процессе достигается различными техническими средствами. Анализируя конкретную технологическую операцию, стараются автоматизировать ее наиболее простыми и надежными средствами, соблюдая все требования к качеству изготовляемой продукции. При этом автоматизированный процесс изготовления может происходить не совсем так, а может быть, и совсем иначе, чем эту операцию делал бы человек своими руками. То же самое происходит и при применении промышленных роботов.
Например, человек очень просто может взять любую нужную ему деталь из нескольких, лежащих как угодно на столе, и вставить ее в станок, под пресс или в собираемый узел. Для робота же операция взятия определенной детали, произвольно лежащей среди других,- задача сложная. Конечно, технически она выполнима. Если снабдить робот системой технического зрения с микропроцессорной обработкой информации для распознавания детали и системой формирования сигналов управления приводами манипулятора, то можно осуществить захват этой произвольно лежащей детали. Такие системы вполне реальны, но, конечно, их следует применять там, где это действительно оправдано. Во многих случаях дешевле сделать механическое устройство для упорядоченной подачи данных деталей к роботу (такие устройства существуют в разных вариантах), чтобы сам робот имел простейшую конструкцию без сложного управления (обладал меньшей стоимостью и большей надежностью). Но во всех случаях главная задача переноса детали в нужное место (вставить деталь в станок для обработки, положить под пресс или в собираемый узел изделия) вместо человека будет осуществлена роботом. Человек будет исключен из технологического процесса (если остальная часть процесса тоже автоматизирована).
Итак, при роботизации для достижения надлежащего эффекта требуется несколько пересмотреть организацию технологического процесса, а иногда и коренным образом переоснастить производственный участок на базе технологического оборудования с числовым программным управлением, чтобы не объединять новую технику с устаревшей и малопроизводительной. Робот важен не сам по себе, а в комплексе с основным технологическим оборудованием. Именно в таком сочетании робот даст колоссальные преимущества во многих отношениях, которые мы ниже рассмотрим специально. Эти преимущества оправдают все затраты на реконструкцию производства при роботизации, если, разумеется, правильно организовать все это как хорошо продуманную комплексную систему.
Начало применения роботов в промышленном производстве относится к концу шестидесятых годов нашего столетия. Однако манипуляционные механизмы разных назначений, которые могут считаться прототипом исполнительной части робота, существовали уже много раньше. Так же раньше, независимо от них, появились системы числового программного управления (ЧПУ) для фрезерных станков, получившие распространение на другое технологическое оборудование. Можно рассматривать первые промышленные роботы как симбиоз этих двух технических новшеств.
Что касается первоначальных манипуляционных механизмов (не роботов), то они в разных простейших промышленных применениях употреблялись в виде двух- и трехзвенных захватывающих устройств и механических рук, связанных с технологическим оборудованием чисто механически, без собственной системы управления. Другим первоисточником явились копирующие механические манипуляторы для работы с радиоактивными веществами в закрытых зонах. В закрытой камере находился рабочий манипулятор. Человек-оператор располагался за остекленной защитной стенкой. Соответствующие звенья обоих механизмов были связаны друг с другом механическими тягами через стенку.
Впоследствии системы дистанционного управления манипуляторами и наблюдения за ними совершенствовались. В основном это происходило параллельно с развитием промышленной робототехники. Ниже об этом тоже будет сказано подробнее. Но, говоря об истории появления роботов, мы здесь хотим отметить только существовавший прототип манипулятора как исполнительного механизма. Принципиальное же отличие от будущего робота состояло в том, что еще не была предусмотрена автоматическая работа по переналаживаемой программе.
Современные и перспективные промышленные роботы делятся на три рода, именуемые также "поколениями": программные, адаптивные и "интеллектные" (с элементами искусственного интеллекта). Все они обладают перепрограммируемостью, т. е. свойством заменять управляющую программу. При этом в роботах первого поколения (программные роботы) перепрограммирование производится оператором (рис. 1.2), после чего робот действует, однообразно повторяя жестко заданную программу.
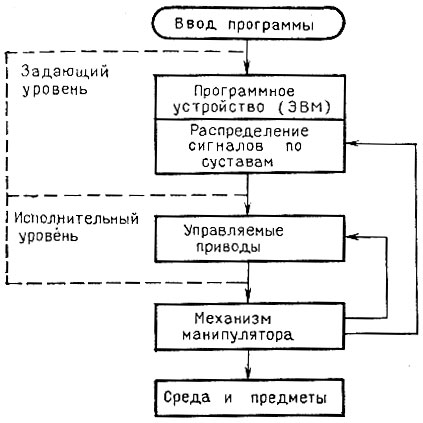
Рис. 1.2. Структура программного робота
Основы программы действий роботов второго поколения (адаптивные роботы) закладываются человеком, но робот имеет свойство в определенных рамках автоматически перепрограммироваться (адаптироваться) в ходе технологического процесса в зависимости от обстановки, которая неточно определена заранее (рис. 1.3).
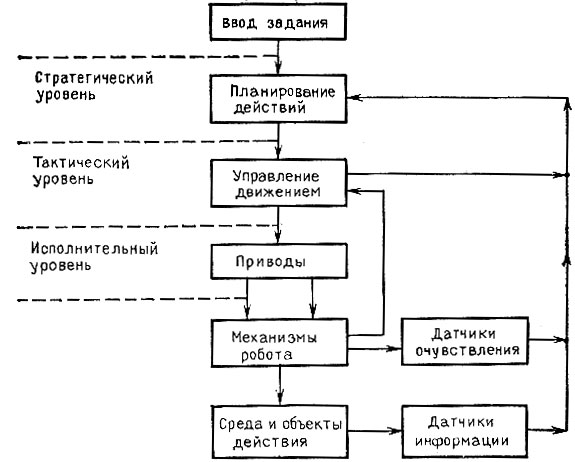
Рис. 1.3. Структура адаптивного робота
Для роботов третьего поколения (интеллектные роботы) задание на работу вводится человеком в более общей форме, а робот обладает возможностью планировать свои действия в неопределенной или меняющейся обстановке, чтобы суметь выполнить заложенное в его память задание (рис. 1.4). Интеллектный робот отличается богатым арсеналом логических операций и системного самопрограммирования.
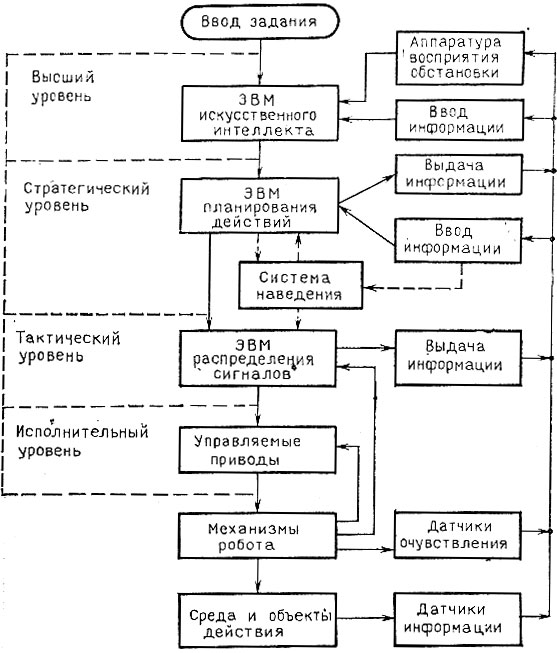
Рис. 1.4. Структура интеллектного робота
Следовательно, интеллектный робот обладает как бы элементами искусственного интеллекта, "способными" воспринимать неопределенную или меняющуюся обстановку, обрабатывать эту информацию с целью выработки и принятия решения, планирования действий и формирования сигналов управления на приводы по всем степеням подвижности манипулятора для реализации необходимых движений. Функционально, по внешним результатам, такой робот действует аналогично человеку, который понимает, как ему поступить и какие движения сделать своими "руками" для выполнения заданной работы в неизвестной заранее обстановке. Чтобы не употреблять слова "интеллектуальный", которое имеет совсем другой смысл, условимся роботы с элементами искусственного интеллекта называть интеллектнымн. И, как специально введенный термин, будем употреблять его без кавычек.
Следует заметить, что термин "поколение" не означает смену одних поколений роботов другими, в отличие, например, от поколений вычислительных машин. Каждое поколение роботов имеет самостоятельное значение, и в них будут развиваться элементная база и их технические возможности. Каждое из поколений промышленных роботов широко применяется в соответствующих условиях эксплуатации. Поэтому термин "род" вместо термина "поколение" тут более уместен. Четвертого рода (поколения) нет, так как третье (интеллектные роботы) может в любых необходимых формах наращивать элементы искусственного интеллекта по мере накопления наших знаний, технических возможностей и потребностей промышленности. Очевидно, что всегда будет иметь смысл применение простейших программных роботов, несмотря на появление более совершенных адаптивных роботов.
Каждый род промышленных роботов по принципу управления подразделяется на типы. Так, например, промышленные роботы первого поколения (программные) имеют три типа управления - цикловое, позиционное и контурное, которые будут рассмотрены в следующей главе. Адаптивные и интеллектные роботы различаются средствами очувствления, принципами адаптации, заложенными в их системах управления, и уровнями развития элементов искусственного интеллекта.
Как видно из изложенного, роботы различаются по принципам построения их систем управления. Но все они имеют еще много разновидностей по другим признакам: числу степеней подвижности, грузоподъемности, различию приводов (электрические, гидравлические, пневматические), сочетанию кинематических пар в сочленениях звеньев.
Различные технологические назначения роботов также накладывают на них свой отпечаток, в том числе в разнообразии дополнительной технологической оснастки.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'