§ 1.2. Общая характеристика робототехники
Робототехника вообще, в том числе и промышленная робототехника,- это более широкое понятие, чем робот или промышленный робот. В технике используется также и другой термин - робототехнические системы.
Промышленный робот является автоматической машиной, представляющей собой элемент технологического оборудования, сопрягаемый с остальным оборудованием в некоторый роботизированный технологический комплекс. Робот - это принципиально новый элемент оборудования, автоматизирующий те ручные операции, которые либо не поддаются автоматизации более простыми традиционными средствами, либо в которых простые средства не дают возможности гибкой перенастройки. В этом смысле подключение робота позволяет в определенной степени завершить комплексную автоматизацию производственных процессов в масштабе линии, участка, цеха с приданием им гибких свойств. Они позволяют исключить человека из непосредственного участия в выполнении технологического процесса на вспомогательных и основных операциях. Принципиально важным здесь является то, что промышленный робот надо рассматривать, как мы уже отмечали, не обособленно, а именно в составе определенного технологического комплекса.
Поэтому первое расширение понятия робототехники (а ниже мы скажем и о других) состоит в том, что в него включается не только робот, но и роботизированный технологический комплекс (РТК) в целом. Он состоит из станка, пресса или другого технологического агрегата, обслуживаемого промышленным роботом, и общей системы управления (рис. 1.5). Рассматривается в робототехнике и групповое применение роботов в автоматической линии. Сюда же можно отнести сварочные, окрасочные и сборочные роботизированные комплексы.
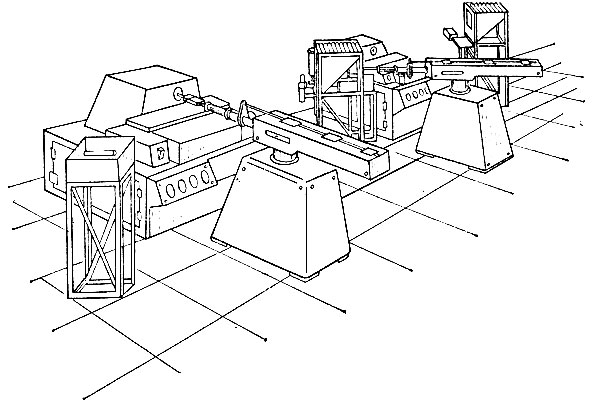
Рис. 1.5. Роботизированный технологический комплекс
Такой комплексный подход необходим потому, что, с одной стороны, нельзя рассматривать (и проектировать) робот в отрыве от его функционирования в составе РТК, так как решение определенной технологической задачи является основным назначением робота. С другой стороны, включение робота в работу со станком или другим агрегатом (или в технологическую линию) требует пересмотра организации технологического процесса и управления его ходом, подчинения определенному четкому ритму функционирования РТК, синхронизации действий всех входящих в него устройств под общим управлением от микроЭВМ или устройств ЧПУ.
Здесь необходимо заметить, что промышленные роботы, робототехнические системы и РТК обладают различными специфическими особенностями при использовании в различных отраслях промышленности. Наиболее развито создание и применение роботов для машиностроительных и приводные модули, управляющие модули, элементы программного обеспечения и т. п. То же самое относится и к РТК в целом.
Второе расширение понятия робототехники заключается в том, что к ней относятся не только промышленные роботы, но также и роботы, предназначенные для других целей. Робототехнические системы самых разнообразных конструкций нужны для исключения ручного труда в прачечных и красильных, при мусороуборке, очистке и мойке наружных приборостроительных отраслей, в которых имеется чрезвычайно большое разнообразие технологических задач. Однако большая специфика производственных процессов наблюдается и в немашиностроительных отраслях промышленности, таких, как легкая (текстильная, трикотажная, обувная, швейная и т. п.), пищевая, химическая (со многими подотраслями), металлургическая, угле-, нефте-, газо-добывающая и другие. Понятие о роботизации в таких отраслях народного хозяйства можно найти в книге [47].
Нельзя создать универсальный робот для всего разнообразия задач промышленного производства. Нужна известная специализация робототехнических систем. Но, с другой стороны, необходима и определенная унификация их, чтобы можно было обходиться ограниченным типажом промышленных роботов. Унификация должна касаться не только типов роботов в целом, но и их отдельных устройств. Например, различные роботы могут включать в себя однотипные стен и окон многоэтажных зданий (рис. 1.6). Нужны роботы для взятия проб грунта, камня, биологических объектов в недоступных или труднодоступных для человека местах - в глубинах морей и океанов, в космосе, а также в опасных и зараженных местах на Земле. Некоторые робототехнические системы начинают применяться и в медицине.
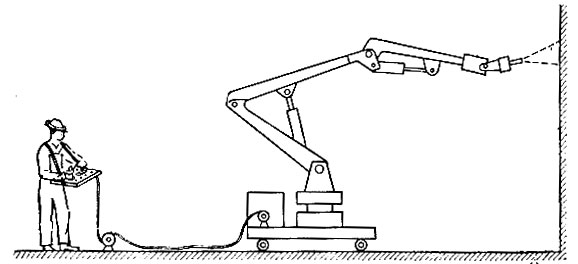
Рис. 1.6. Робот для очистки и мойки зданий
Третье расширение понятия робототехники состоит в рассмотрении и создании других классов роботов. Все виды роботов, о которых говорилось выше, относятся к классу манипуляционных роботов. У них исполнительным устройством является манипулятор - искусственная рука, выполняющая функции, аналогичные функциям рук человека в процессе трудовой деятельности (см. § 1.1). Другими классами роботов являются мобильные (движущиеся) роботы и информационные роботы.
Мобильные робототехнические системы отличаются наличием движущегося шасси с автоматически управляемыми приводами. Это могут быть колесные, шагающие (локомоционные, рис. 1.7), колесно-шагающие, гусеничные шасси. Существуют также плавающие и летающие мобильные робототехнические системы. Часто мобильные машины несут на себе и манипуляционные роботы. Они могут применяться например, на необитаемых подводных аппаратах, в космических полетах, а также на промышленных предприятиях, в строительстве и на транспорте. На заводах и фабриках еще в значительной степени используется ручной труд при транспортировке деталей, материалов и инструмента в заводском цехе между складами и станками. Здесь роботизация связана с созданием автоматических тележек (робокаров) и автоматических подвесных транспортных роботов. К этому надо добавить и автоматизацию всех видов складских работ с помощью робототехнических систем. Примером мобильных роботов являются и планетные самоходные машины, в частности советский луноход.
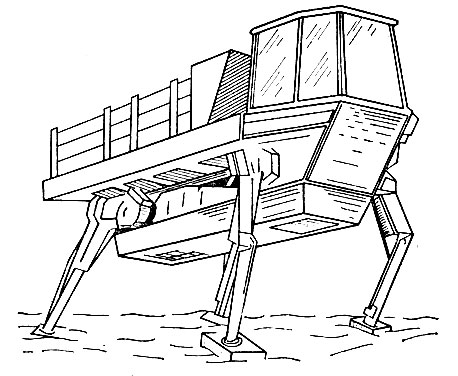
Рис. 1.7. Шагающий робот
Большое значение имеет роботизация сельскохозяйственных работ, в том числе с помощью самоходных машин, погрузочно-разгрузочных и складирующих систем.
Информационно-управляющие робототехнические системы могут не иметь механически движущихся исполнительных устройств. На основании информации, поступающей от каких-либо внешних источников, они производят по определенным алгоритмам и программам (в том числе по адаптирующимся к обстановке и к поставленной задаче) обработку информации, выдачу результатов на дисплеи или другие внешние устройства, а также автоматически вырабатывают на основе этих результатов необходимые управляющие сигналы. Информационные робототехнические системы могут определять свойства неизвестных объектов в любой среде в частности автоматически проводить космические и подводные исследования (см., например, рис. 1.8, на котором показан необитаемый информационный аппарат-робот "Скат-гео" с буйковой системой передачи информации на корабль). Такие роботы могут производить автоматическую диагностику подводных частей сооружений, геологическую разведку морского дна, осуществлять получение информации о состоянии внутренних стенок и частей атомных и термоядерных установок.
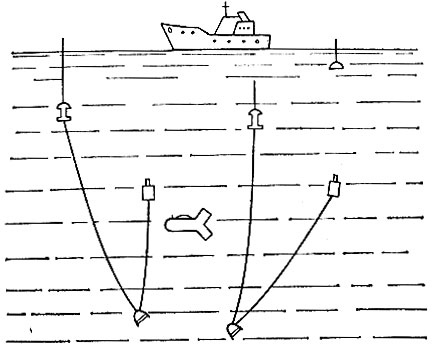
Рис. 1.8. Информационный подводный робот
Информационные роботы могут помещаться на необитаемых аппаратах и автоматически управлять их движением в зависимости от ситуации и результатов измерений в месте их действия.
К информационным роботам относятся также и автоматические контрольно-измерительные системы на производстве, где много ручного труда затрачивается на контрольно-измерительные операции. Здесь задачей робототехники является автоматизация подачи деталей на контроль, самого процесса контроля, проведения измерений, автоматическая раскладка деталей разной степени годности (или просто на годные и бракованные), а также передача к станку информации о необходимости подналадки и пр. Решение этой задачи завершит комплексную автоматизацию производства и ликвидацию однообразного ручного труда. В таких информационных роботах могут применяться и некоторые манипуляционные устройства.
Не меньше рутинного труда и у финансистов, чертежников, технологов, нормировщиков и даже у конструкторов, проектантов и плановиков. Сферы их деятельности являются особыми областями автоматизации с использованием вычислительной техники, дисплеев (числовых, буквенных и графических) и графопостроителей. Здесь нет механических рук или транспортных перемещений. Но, по сути дела, как задача ликвидации рутинного (ручного и умственного) труда это является областью робототехники в широком понимании этого термина. Ведь любой ручной труд рабочего (у станка, при сборке и пр.) фактически сопряжен с его умственной деятельностью. Поэтому и обычный промышленный робот тоже автоматизирует совокупность ручного и умственного труда.
Интересной перспективой является создание роботов-специалистов. Имеется в виду, что робототехника призвана автоматизировать все "неинтересные" для человека действия рутинного характера, не только двигательные, но и умственные. Речь идет о таких роботах-специалистах, как автоматический библиотекарь, автоматический информатор по сложным вопросам, робот-программист, робот-продавец, робот-диагностик в медицине и технике и многие другие (уже существуют сейчас, например, робот-шахматист и роб отрешатель задач). В роботы-специалисты могут превратиться имеющиеся в настоящее время автоматизированные системы, например система выдачи авиационных билетов (с исключением человека-кассира)". Разумеется, робот-специалист не будет оформляться в виде, похожем на человека. Он станет такой же машиной, как и промышленные роботы. Конструкция его будет удобной с точки зрения изготовления и использования.
Говоря о трех различных классах робототехнических систем - манипуляционных, мобильных и информационных, следует иметь в виду, что возможны (и они реальны) сочетания всех трех или любых двух из указанных классов устройств в одной автоматически действующей машине-роботе.
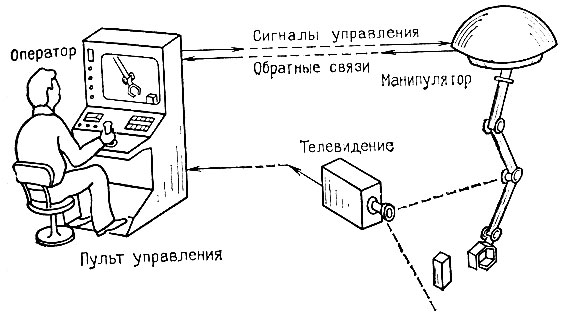
Рис. 1.9. Дистанционное управление с телевизионным наблюдением
Наконец, четвертое расширение понятия робототехники относится к классу дистанционно управляемых роботов и манипуляторов. Как уже говорилось, важнейшими специальными проблемами робототехники являются безлюдная добыча угля и других ископаемых, ведение горных разработок, добыча нефти и газа со дна океанского шельфа, проведение работ в космическом пространстве, выведение человека из опасных зон в системах атомной и термоядерной энергетики, проведение работ в различных экстремальных условиях. Решение всех этих задач содержит одну общую особенность, а именно необходимость удаления человека-оператора от места проведения работы на безопасное расстояние и организации в связи с этим дистанционного наблюдения и управления действиями роботов, манипуляторов и других агрегатов вне непосредственной их видимости (рис. 1.9), а в некоторых случаях и при непосредственном визуальном наблюдении (например, через стекло, рис. 1.10).
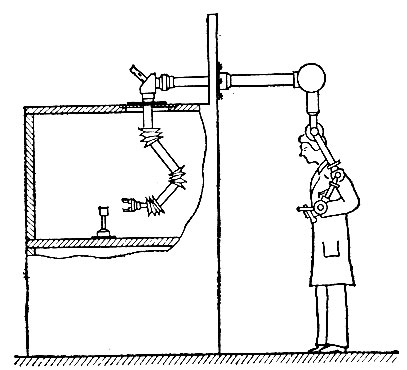
Рис. 1.10. Дистанционное управление с непосредственным наблюдением
Наблюдение при этом ведется телевизионными и другими приборными средствами, а управление - различными управляющими устройствами с участием ЭВМ (в простейших случаях без нее). Если манипуляционный рабочий механизм не имеет автоматических режимов, а воспроизводит только движение руки человека-оператора, то говорят о дистанционно управляемых манипуляторах. Если же основная часть рабочей операции запрограммирована и совершается автоматически, а человек-оператор лишь задает ту или иную программу или вмешивается в управление в критических случаях, то мы имеем дело с дистанционно управляемыми роботами.
Надо заметить, что дистанционно управляемые манипуляторы и роботы весьма актуальны и в ряде производственных цехов - литейных, металлургических (для горячих технологических процессов), в некоторых химических производствах.
Дистанционное управление может относиться не только к маннпуляционным, но также и к мобильным роботам, как это было, например, с луноходом, управлявшимся по радио с Земли.
Наконец, массовым применением отличаются проводимые повсеместно разнообразные погрузочно-разгрузочные работы. Их роботизация имеет первостепенное значение там, где применение обычных подъемных кранов невозможно. Такие работы могут производиться манипуляторами с ручным управлением либо манипуляторами с дистанционным управлением. В ряде случаев при наличии строго определенной обстановки такие операции могут производиться и роботами (например, на автоматизированных складах) без участия человека.
Для выполнения тяжелых работ (подъем и перенос тяжеловесных грузов) применяются многозвенные механизмы с электро- или гидроприводами в каждом суставе. Это сбалансированные манипуляторы, т. е. манипуляторы с ручным управлением. Они строятся так, что любой (в пределах их номинальной грузоподъемности) груз, закрепленный в грузозахватном устройстве манипулятора, удерживается в любом пространственном положении неподвижно, и оператор, легко перемещая грузозахватное устройство, может поднимать и переносить груз в нужное место (рис. 1.11). Такие манипуляторы, имеющие грузоподъемность в десятки и сотни килограммов, очень удобны для работ с грузами в промышленных цехах, на небольших складах. Манипулятор может ставиться там неподвижно или же перемещаться на колесиках.
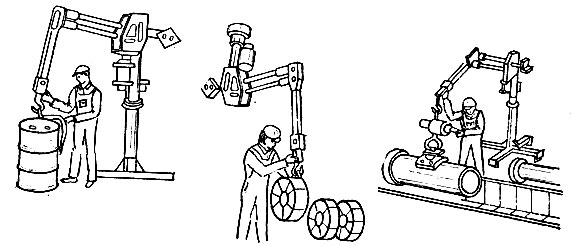
Рис. 1.11. Сбалансированные манипуляторы
Управление движением сбалансированного манипулятора может производиться и не непосредственно, а, как было сказано, дистанционно путем нажима кнопок, включающих приводы отдельно по каждой степени подвижности манипулятора. Это удобно, например, при погрузке или разгрузке грузового автомобиля и вагона (рис. 1.12) и вообще во всех тех ситуациях, когда перемещения груза (вследствие высоты и значительной емкости транспорта или ячейки склада и т. п.) превышают возможности непосредственного движения руки человека.
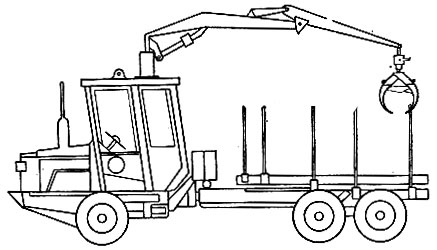
Рис. 1.12. Погрузочно-разгрузочный манипулятор с дистанционным управлением
Следует сказать еще о примыкающих к рассмотренному классу управляемых многозвенных механизмов так называемых экзоскелетонах.
Экзоскелетон (внешний скелет) представляет собой механизм, сопряженный непосредственно с телом человека (с рукой, ногой, спиной) именно как внешний скелет. При этом движения частей тела человека дают управляющие
воздействия на соответствующие приводы экзоскелетона (рис. 1.13). В результате звенья экзоскелетона по принципу копирующей системы повторяют все движения рук и ног человека, причем всю тяжелую нагрузку берут на себя приводы механизма. Таким образом, человек легкими движениями может в сотни раз усиливать свои физические возможности при подъеме и переносе тяжестей, а также при ходьбе по труднопроходимой местности. Экзоскелетон может встраиваться в скафандр для облегчения действий водолаза на глубине.
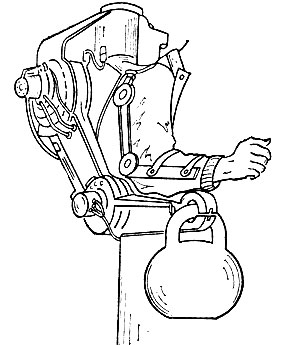
Рис. 1.13. Экзоскелетон
В заключение отметим, что решение задач робототехники связано со многими проблемами в связи с тем, что здесь мы получаем комплекс разнородных технических устройств, которые должны работать как единая динамическая система. Это в сильной степени влияет на проектирование и наладку робототехнических систем, их типизацию по видам технологических процессов и другим признакам, перспективные научные исследования, создание математического обеспечения систем управления роботами и их микропроцессорную реализацию, вопросы испытаний и диагностики роботов, применение в технологических процессах с перестройкой последних, вопросы эксплуатации роботов в промышленности и во всех описанных выше областях. Все это достаточно новые вопросы, требующие разработки новых методов и приемов, а также новой квалификации кадров. На новых основах должны строиться и экономические расчеты по применению робототехнических систем с учетом социально-психологических вопросов, возникающих при этом.
Что же касается дистанционно управляемых роботов и манипуляторов, то здесь дополнительно большую роль играют инженерно-психологические, эргономические исследования и расчеты, целью которых является достижение наибольших удобств и эффективности совместной работы человека и машины.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'