Глава 4. Робототехника в особых условиях
§ 4.1. Дистанционно управляемые роботы и манипуляторы
Как в промышленности, так и в других областях народного хозяйства нередко приходится работать в так называемых экстремальных условиях, когда человек подвергается вредным для здоровья воздействиям, опасностям взрыва или появления сильной радиации, загазованности, высоких или низких температур и т. п. или когда вообще становится невозможной деятельность человека, а специальная защита существенно снижает эффективность его действий. Сюда относятся работы с радиоактивными веществами и установками, работы в подводной среде, подземных шахтах и рудниках, горячих заводских цехах, работы со взрывоопасными предметами и т. п.
В таких условиях могут быть применены обычные или специальные роботы, действующие автоматически по программе. Однако, во-первых, они требуют переналадки на различные операции и, во-вторых, не все операции, которые необходимо выполнять в экстремальных условиях, легко поддаются роботизации. В обоих этих случаях необходимо вмешательство человека-оператора, причем оно должно осуществляться дистанционно от пульта оператора, установленного в безопасном месте.
Таким образом, возникает особый видробототехнических систем - дистанционно управляемые роботы и манипуляторы.
Дистанционно управляемые манипуляторы делятся на три рода (по типу систем управления):
- с командным управлением;
- с копирующим управлением;
- с полуавтоматическим управлением.
Дистанционно управляемые роботы разделяются на два рода:
- с супервизорным управлением;
- с диалоговым (интерактивным) управлением.
Конечно, это неполная классификация. Можно рассматривать много разновидностей, связанных с областями их применения. Например, манипуляторы, применяемые в атомной энергетике, резко отличаются от манипуляторов подводных или космических. Иная их компоновка имеет место в шахтах, на строительстве, в коммунальном хозяйстве и т. п.
Существенное различие вносят типы приводов (электрические, гидравлические). Для подводных работ, например, применяются в основном гидравлические манипуляторы. В атомной энергетике - чаще электромеханические. В других областях - и те, и другие.
Во многих случаях дистанционно управляемые манипуляторы и роботы устанавливаются на подвижных основаниях: колесных, гусеничных, плавающих, летающих и т. д. Это также накладывает свой отпечаток и на их кинематику, и на устройства систем управления и наблюдения.
Выше мы привели классификацию принципов дистанционного управления. Но большое разнообразие имеется и в технической реализации каждого из этих принципов.
Охарактеризуем коротко принципы дистанционного управления.
Командное управление характеризуется тем, что человек-оператор путем нажатия различных кнопок или включения тумблеров приводит в действие по очереди приводы манипулятора по различным степеням подвижности (рис. 4.1), добиваясь, таким образом, требуемого конечного положения всего манипуляционного механизма. Этот принцип управления часто применяется на обитаемых подводных аппаратах, например, при взятии с помощью наружного манипулятора образцов пород со дна моря (человек наблюдает за обстановкой через стекло иллюминатора).
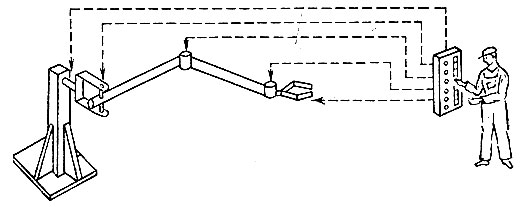
Рис. 4.1. Принцип построения командного дистанционного управления манипулятором
Копирующее управление отличается тем, что оператор работает с задающим механизмом кинематически полностью подобным рабочему манипулятору (рис. 4.2). При этом каждый шарнир задающего механизма связан по принципу следящей системы с соответствующим шарниром рабочего манипулятора. В результате, если оператор будет перемещать конец задающего механизма, точно такие же перемещения получат все звенья рабочего манипулятора одновременно (а не поочередно, как в командном способе).
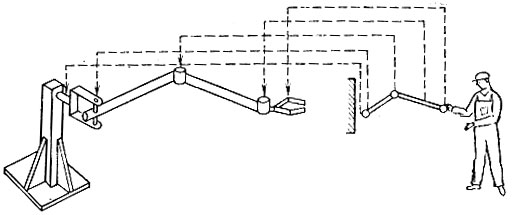
Рис. 4.2. Принцип построения копирующего дистанционного управления манипулятором
Полуавтоматическое управление осуществляется при помощи задающего механизма в виде управляющей рукоятки со многими степенями свободы. Человек-оператор, не производя рукой широких движений, как это имеет место при копирующем способе, простым переводом рукоятки в ту или иную сторону управляет движением рабочего манипулятора. При этом кинематическая схема управляющей рукоятки может отличаться от кинематики рабочего манипулятора (рис. 4.3). Она строится, исходя из удобства действий оператора и удобства ее технической реализации. Микропроцессорное вычислительное устройство выполняет в этом случае преобразование координат при формировании сигналов управления на приводы рабочего манипулятора.
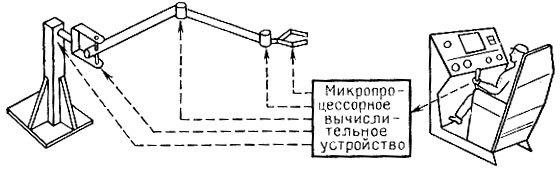
Рис. 4.3. Принцип построения полуавтоматического дистанционного управления манипулятором
Принципы дистанционного управления роботами (супервизорный и диалоговый) предполагают автоматические режимы действий робота, помещенного в опасной зоне. При этом функционированием робота управляет ЭВМ по заданной или адаптивно изменяющейся программе таким же образом, как в промышленных роботах (см. гл. 2). Но дополнительно робот имеет здесь еще дистанционную связь с человеком. Оператор, наблюдая за ходом технологической операции с помощью телевидения, может дистанционно тем или иным способом вмешиваться в его действия (рис. 4.4).
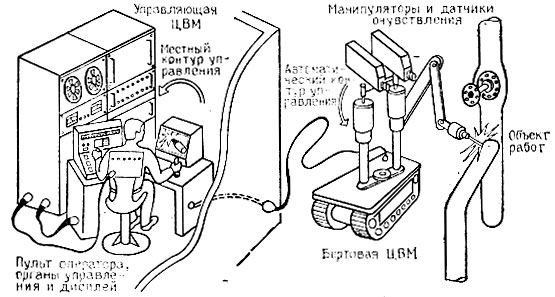
Рис. 4.4. Принцип построения дистанционного управления роботами
Во всех случаях дистанционного управления манипуляторами и роботами система имеет два канала: информационный (к человеку) и управляющий (от человека). В целом получается замкнутая через человека-оператора система дистанционного управления, включающая различные технические устройства. Таким образом, мы имеем дело с замкнутой человеко-машинной системой. Следовательно, здесь особую важность приобретает решение эргономических проблем, в том числе инженерно-психологических, с учетом психофизиологических свойств человека-оператора.
Цель исследования и проектирования таких человеко-машинных систем заключается в том, чтобы, во-первых, получить наибольшую эффективность действия системы в целом, во-вторых, предоставить человеку наибольшие удобства работы в смысле наилучшей наглядности и необходимой полноты подаваемой ему информации о действиях робота или манипулятора (телевизионной, приборной и т. п.) и в смысле наилучшего соответствия управляющих устройств выполняемой задаче и свойствам самого человека.
В-третьих, целью исследования при проектировании является нахождение целесообразного для каждой задачи распределения функций между человеком и машиной. При этом необходимо установить и соответствующий уровень технической реализации системы с учетом многих факторов: характера выполняемых операций, стоимости системы, загрузки человека, надежности функционирования, необходимого быстродействия. Исходя из этого, надо выбрать, применять ли манипулятор с тем или иным принципом управления, либо простой программный робот, либо адаптивный робот с тем или иным оснащением. Более совершенная техническая часть системы в значительной степени освобождает человека от ряда ручных и умственных операций, однако она может оказаться неоправданно дорогой для данной конкретной задачи, а может быть, и менее надежной в данных экстремальных условиях.
От характера задачи зависит, можно ли достаточно просто ее формализовать и запрограммировать для робота. Может оказаться, что неопределенность условий слишком велика и автоматическая адаптация трудно реализуема, а человек-оператор в этом случае по дистанционному наблюдению может легко распознавать обстановку и принимать решения для управления действиями робота или манипулятора. Тогда вопрос решается в пользу упрощения технической части системы управления и придания более существенной роли человеку в процессе управления.
Таким образом, социально-экономические вопросы в этих системах требуют многостороннего рассмотрения с учетом человеческого фактора.
Охарактеризуем коротко области применения дистанционно управляемых манипуляторов и роботов.
![Рис. 4.5. Обитаемый подводный аппарат 'Бивер' (США) с манипуляторами [37]](pic/000090.jpg)
Рис. 4.5. Обитаемый подводный аппарат 'Бивер' (США) с манипуляторами [37]
Для подводных работ применяются манипуляторы, устанавливаемые либо на небольших необитаемых подводных аппаратах-роботах, либо на обитаемых - с экипажем два-три человека (рис. 4.5). В случае необитаемого аппарата дистанционное управление осуществляется человеком-оператором с надводного корабля, находящегося над местом проведения подводных работ, по кабельной линии связи (рис. 4.6). По этому же кабелю на борт корабля передается телевизионное изображение подводной обстановки в зоне действия робота от телекамеры,установленной на роботе[58].
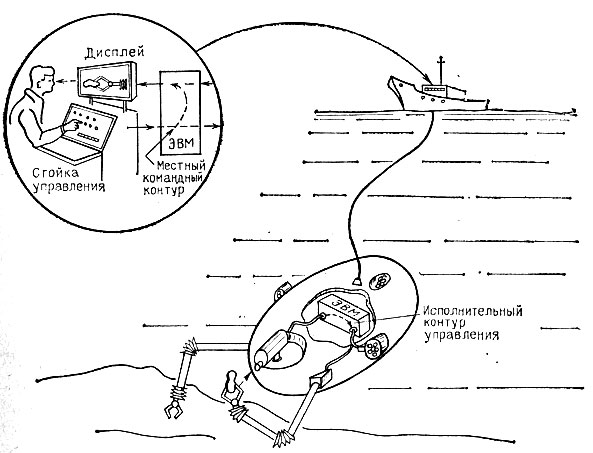
Рис. 4.6. Принципиальная схема необитаемого подводного аппарата-робота с дистанционным управлением
Подводные роботы обоих типов применяются для геологических и гидробиологических исследований дна, разведки в интересах постройки подводных сооружений (в том числе при добыче нефти и газа), обслуживания строительства, а также для инспекции исправности подводных сооружений, обслуживания их ремонта, обслуживания подъема затонувших объектов, прокладки кабелей и т. п. (рис. 4.7) [1].
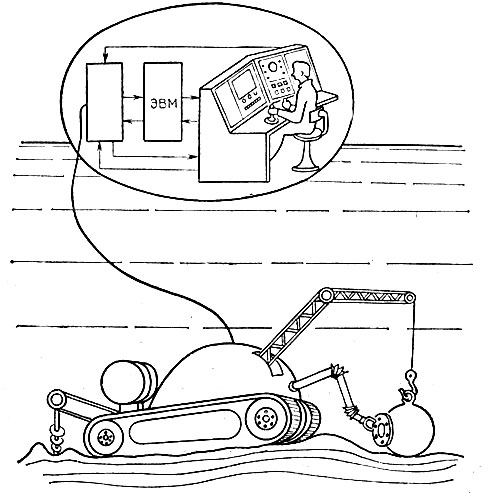
Рис. 4.7. Подводная машина-робот с дистанционным управлением
На необитаемых аппаратах предпочтительно применять комбинированную систему управления. На борту аппарата ставится микроЭВМ для работы манипуляторов в автоматическом режиме по заранее заданным программам в комбинации с ручным дистанционным управлением (копирующим или полуавтоматическим) с пульта на надводном корабле. Таким образом человек-оператор осуществляет супервизорное управление, а в случае необходимости берет управление на себя.
Большое значение будут иметь дистанционно управляемые манипуляторы и роботы для работ в космическом пространстве. С их помощью космонавт, не выходя из космического корабля, сможет производить работы по установке, снятию и ремонту наружных устройств, загрузке и разгрузке открытых люков, обслуживанию технологических модулей, выведению спутников и т. п.
С помощью телекамеры на конце бортового манипулятора пилоты американских орбитальных кораблей типа "Спейс Шаттл" могли осматривать состояние наружного покрытия, недоступного для непосредственного наблюдения в иллюминаторы. Манипуляторами будут оснащены в будущем межорбитальные транспортные аппараты (космические буксиры), как беспилотные, так и пилотируемые, предназначенные для перемещений грузов с одной орбиты на другую. Роботы будут использоваться при монтаже в космосе больших конструкций, например многокилометровых солнечных энергостанций или антенн радиотелескопов. Наконец, нетрудно предвидеть использование в более отдаленном будущем роботов в работах на поверхностях естественных небесных тел - планет, их спутников, астероидов, комет*.
* (См. Левантовский В. И. Механика космического полета в элементарном изложении.- 3-е изд.- М.: Наука, 1980; Космонавтика: Энциклопедия.- М.: Советская энциклопедия, 1985.)
К космическим и подводным роботам и манипуляторам предъявляются повышенные требования в отношении энергопотребления из-за ограниченности бортовых источников питания. Повышенные требования предъявляются и к малости весов и габаритов аппаратуры управления и наблюдения, устанавливаемой на борту аппарата.
Другой широкой областью применения дистанционно управляемых манипуляторов является обслуживание атомных, термоядерных и магнитогидродинамических установок, где они работают в условиях высокой радиации и сильных магнитных полей. На атомных электростанциях дистанционно управляемая техника необходима не только в условиях нормальной эксплуатации, но и в аварийных ситуациях. Важность наличия самых разнообразных дистационно управляемых робототехнических систем, служащих для этих целей, особенно отчетливо видна, если вспомнить об опыте ликвидации последствий крупной аварии, которая произошла на Чернобыльской атомной электростанции.

Рис. 4.8. Мощный манипулятор для горных разработок
В последнее время получили применение дистанционно управляемые мощные манипуляторы на горных разработках (рис. 4.8), валке леса и оттаскивании бревен, на работах по отделке, очистке и мойке многоэтажных зданий.
Инструменты и схваты, которыми оперируют металлурги у горячих печей, могут быть выполнены как дистанционно управляемые манипуляционные механизмы (рис. 4.9).
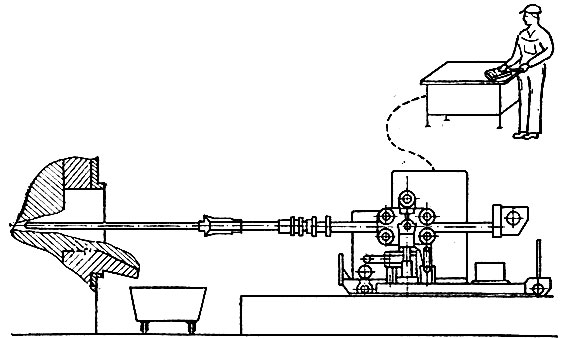
Рис. 4.9. Дистанционно управляемый манипулятор в металлургическом производстве
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'