§ 4.2. Копирующие системы управления манипуляторами
Как мы уже знаем, копирующая система характеризуется тем, что у человека-оператора имеется задающее устройство в виде многозвенного механизма, кинематически подобного рабочему манипулятору. Оператор вручную перемещает задающее устройство. В каждом шарнире этого устройства имеется датчик (например, сельсин), сигнал с которого дистанционно передается на привод соответствующего звена рабочего манипулятора. Таким образом, каждое звено рабочего манипулятора получает движение по принципу следящей системы с обратной связью. Это - управляющий канал.
В копирующей системе имеется также информационный канал для отображения на пульт оператора обстановки в рабочем пространстве и определенных параметров состояния и движения манипулятора. При этом наблюдение может вестись либо непосредственно визуально через защитное стекло, либо по телевизионной системе. Но, кроме этого, существует и ряд других дополнительных средств, увеличивающих эффективность системы, которые будут описаны ниже.
В копирующих системах важным фактором является масштабирование перемещений и усилий. При необходимости больших перемещений в рабочем пространстве задающее устройство, сохраняя кинематическое подобие манипулятору, может иметь меньшие размеры. И, наоборот, для микроманипуляторов задающее устройство делается более крупным в соответствии с возможностями движения человеческой руки. То же самое касается и масштабирования усилий на задающем устройстве по сравнению с рабочими усилиями на манипуляторе.
Различают следующие типы дистанционных копирующих систем управления манипуляторами:
- системы одностороннего действия;
- системы одностороннего действия с пассивным отражением усилий;
- системы двустороннего действия обратимые;
- системы двустороннего действия необратимые;
- системы двустороннего действия комбинированные.
В системах одностороннего действия в задающем устройстве устанавливаются датчики положения, сигналы с которых передаются на приводы соответствующих звеньев рабочего манипулятора. Следовательно, здесь происходит лишь односторонняя передача воздействия человека-оператора на манипулятор без ответных воздействий со стороны манипулятора на человека (см. рис. 4.2). Имеется только внутренняя обратная связь по положению в следящей системе "задающее устройство - манипулятор".
В системе одностороннего действия человек-оператор пользуется лишь визуальным каналом (например, с помощью телевидения) наблюдения за движением манипулятора, повторяющего в рабочей зоне все движения задающего устройства, перемещаемого рукой человека. Недостатком такой системы является то, что оператор не чувствует рабочих усилий при действиях манипулятора с предметами, в то время как он привык при непосредственной работе руками чувствовать эти усилия. Вследствие этого, а также из-за отсутствия непосредственного наблюдения и необходимости передачи своих действий через движение задающего устройства существенно замедляется весь ход рабочего процесса.
Поэтому часто копирующую систему одностороннего действия снабжают устройством пассивного отражения усилий от рабочего манипулятора на руку человека-оператора. Пассивное отражение усилий осуществляется путем установки в каждом звене задающего устройства элементов пассивной загрузки. Например, таким элементом может служить так называемый моментный загружатель, создающий сопротивление движению данного звена задающего устройства, пропорциональное моменту в соответствующем звене рабочего манипулятора, вызванному внешним воздействием со стороны объекта работ. В результате человек-оператор чувствует рабочие усилия, испытывая, хотя бы частично, эффект непосредственной работы с объектом. Это облегчает и ускоряет процесс его действий.
Моментный загружатель строится на основе измерения момента в исполнительном приводе каждого звена рабочего манипулятора с помощью моментного датчика или других косвенных способов. При этом, когда необходимо, вводится ограничение рабочих усилий. При достижении предельно допустимых для данного манипулятора усилий моментный загружатель останавливает движение системы. Таким способом может быть осуществлено и дозирование усилий при работе, например, с хрупкими предметами.
Копирующие системы двустороннего действия отличаются тем, что приводы устанавливаются не только на рабочем манипуляторе, но и в задающем устройстве. Благодаря этому в системе двустороннего действия передача обеих величин (перемещения и усилия) происходит в двух направлениях: от задающего устройства к манипулятору и обратно. В отличие от систем одностороннего действия с пассивным отражением усилий, здесь имеет место активное отражение усилий от манипулятора на руку человека через задающее устройство. Таким образом, человек-оператор получает через задающее устройство более полное ощущение реальных усилий и движений при работе манипулятора. Человек приобретает большую естественность своего труда и быстрее реагирует на изменение обстановки в рабочем пространстве манипулятора (это явление называется "эффектом присутствия"). Итак, вместо обычных следящих систем здесь появляется новый тип следящих систем двустороннего действия (двунаправленных следящих систем). Обратимые системы двустороннего действия могут быть симметричными и несимметричными.
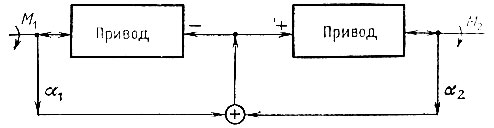
Рис. 4.10. Симметричная система копирующего управления двустороннего действия
Симметричная система (рис. 4.10) представляет собой взаимосвязанный комплекс двух обычных следящих систем по каждой степени подвижности манипулятора. Одна из них управляет положением звена рабочего манипулятора, а другая - положением соответствующего звена задающего устройства, причем за счет их взаимосвязанности происходит передача усилий (моментов) и перемещений (углов поворота) в обе стороны.
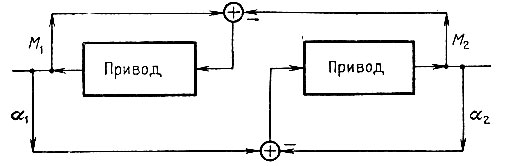
Рис. 4.11. Копирующая система управления двустороннего действия несимметричного типа
В системе двустороннего действия несимметричного типа (рис. 4.11) имеется иначе построенный взаимосвязанный комплекс двух следящих систем по каждой степени подвижности. Одна из них, замкнутая по положению, по-прежнему управляет положением соответствующего звена рабочего манипулятора, а другая, замкнутая по моменту, воспринимает момент нагрузки на манипулятор и передает информацию человеку-оператору о величине этой нагрузки.
Описанные обратимые системы двустороннего действия обладают тем свойством, что рука человека-оператора все время должна быть в напряжении, чтобы противодействовать рабочим усилиям на манипуляторе. Это полезно в процессе работы, но становится излишним при необходимости Удерживать манипулятор в неподвижном положении, в паузах рабочего процесса и т. п. Если же оператор не будет держать с усилием задающее устройство, то последнее начнет двигаться под действием сигналов со стороны манипулятора. В некоторых непредвиденных случаях могут возникнуть неприятные ситуации, когда нагрузочный момент манипулятора начнет "пересиливать" человека.
В связи с этим появились необратимые системы двустороннего действия. Они по каждой степени подвижности манипулятора снабжаются необратимыми самотормозящими передачами. Применяются также фиксирующие элементы (тормозные муфты) для фиксации неподвижного положения системы, когда человек-оператор выпускает из руки задающее устройство. Этим самым с него снимается необходимость удержания задатчика в промежуточных паузах, уменьшается его утомляемость и предоставляется возможность той же рукой выполнять другие необходимые функции.
В комбинированных копирующих системах двустороннего действия сочетаются обратимые и необратимые свойства. Такая система по каждой степени подвижности манипулятора содержит взаимосвязанные следящие системы, которые управляют движением соответственно манипулятора и задающего устройства. Связаны они между собой при помощи функционального преобразователя (рис. 4.12). Последний получает сигналы от датчиков моментов на манипуляторе и на задающем устройстве и выдает воздействия на входы обеих следящих систем. Два различных режима работы функционального преобразователя обеспечивают соответственно обратимый и необратимый режимы в различных условиях работы данной системы двустороннего действия.
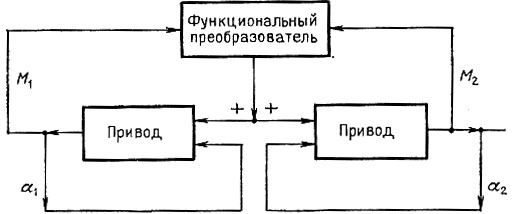
Рис. 4.12. Комбинированная система копирующего управления
В последнее время имеет место тенденция в ряде случаев вместо копирующих систем применять полуавтоматические, где человек-оператор освобождается от утомительных больших перемещений рукой задающего механизма.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'