§ 4.3. Полуавтоматические системы управления и системы дистанционного управления роботами
Полуавтоматические системы дистанционного управления манипуляторами отличаются от копирующих другим характером задающего устройства и наличием вычислителя. В них вместо многозвенного механизма, повторяющего кинематику рабочего манипулятора, применяется управляющая рукоятка с несколькими степенями свободы. Вместо сложных движений при копирующем способе здесь человек-оператор производит только легкое нажатие на рукоятку в требуемом направлении. Конфигурация управляющей рукоятки не обязательно должна соответствовать кинематике рабочего манипулятора. Она может быть произвольной, исходя из удобства воздействия на нее руки человека. Более того, рукоятка может совсем не иметь механических перемещений, т. е. могут восприниматься только усилия нажатия от руки человека. Сигналы от управляющей рукоятки поступают в микропроцессорное вычислительное устройство, где они преобразуются по определенным алгоритмам, в результате чего формируются сигналы управления, подаваемые на все приводы звеньев рабочего манипулятора (рис. 4.13).

Рис. 4.13. Схема полуавтоматической системы дистанционного управления манипулятором
В такой полуавтоматической системе благодаря наличию микропроцессорного вычислительного устройства (см. рис. 4.3) могут быть реализованы самые разнообразные алгоритмы управления и осуществляться движения в любой системе координат независимо от кинематики манипулятора и конфигурации управляющей рукоятки. Наиболее типичными являются три вида алгоритмов управления: скоростной, силовой и позиционный. Они предполагают регулирование соответственно скорости, силы и перемещения на рабочем конце манипулятора пропорционально величине нажатия руки человека на управляющую рукоятку.
При скоростном алгоритме управления величина смещения рукоятки покаждой степени подвижности преобразуется в пропорциональный ей электрический сигнал. Эти сигналы посылаются в микропроцессорный вычислитель. Там происходит, во-первых, преобразование координат управляющей рукоятки в координаты рабочего манипулятора и, во-вторых, формирование сигналов управления приводами по каждой степени подвижности манипулятора таким образом, чтобы конец манипулятора (схват или инструмент) получил скорость движения в том же направлении, в каком оператор нажал на управляющую рукоятку. При этом, очевидно, общая величина и направление смещения рукоятки образуются из составляющих в связанной с ней системе координат, а общая величина и направление скорости схвата - из составляющих в системе координат рабочего манипулятора.
При формировании сигналов управления в микропроцессорном вычислителе для повышения качества процесса управления по правилам теории автоматического регулирования в закон управления могут добавляться производные и интегралы от основного сигнала, пропорционального величине смещения управляющей рукоятки. Вместо этого, если в манипуляторе ставятся следящие приводы, требуемое качество процесса управления может достигаться также внутренними обратными связями и дифференцированиями в самой следящей системе каждого привода.
При силовом алгоритме управления весь процесс снятия сигналов с управляющей рукоятки и преобразования их в микропроцессорном вычислителе с последующим формированием сигналов управления приводами рабочего манипулятора происходит аналогично. Но существенное отличие состоит в том, что пропорционально общему смещению управляющей рукоятки создается сила, как бы тянущая за схват манипулятора, чем и определяется его движение. Непосредственно эта сила реализуется при соприкосновении схвата или инструмента с каким-либо внешним предметом. Эта сила по величине и направлению соответствует общему смещению рукоятки.
Поскольку управляющая рукоятка подпружинена по каждой степени подвижности, то смещение ее пропорционально силе нажатия руки человека на эту рукоятку. Следовательно, можно сказать, что сила, образующаяся на конце рабочего манипулятора, пропорциональна по величине и одинаково направлена с силой нажатия человека на рукоятку. А подпружинена рукоятка просто для того, чтобы возвращалась в исходное положение, когда человек перестанет на нее нажимать.
Наконец, при позиционном алгоритме управления также происходит аналогичная процедура преобразований и формирований. Но разница состоит в том, что в результате создается смещение конца рабочего манипулятора, пропорциональное смещению управляющей рукоятки от руки человека-оператора.
Мы охарактеризовали три основных алгоритма дистанционного полуавтоматического управления манипуляторами. Существуют полуавтоматические системы, в которых заложены все три основных вида алгоритмов. При этом человек-оператор может включать попеременно любой из них. Например, для транспортного перемещения манипулятора в рабочем пространстве целесообразно скоростное управление. Вблизи объектов действия, где важно соблюсти именно величины смещений в малой окрестности, необходимо позиционное управление. При рабочем контакте с объектом - силовое управление, позволяющее человеку-оператору осуществлять в процессе работы определенное силовое воздействие на объект. Возможны, конечно, и другие варианты.
Обычно средство переключения алгоритмов управления выводится на пульт управления. Однако в некоторых случаях проведения определенных манипуляционных работ удается организовать в системе автоматическое переключение алгоритмов управления по соответствующим сигналам датчиков (приближения к объекту и соприкосновения с ним).
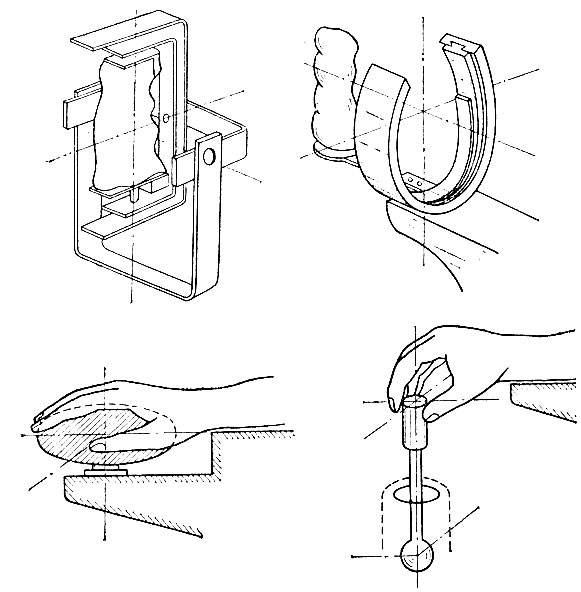
Рис. 4.14. Разновидности управляющих рукояток
Управляющие рукоятки имеют самые различные принципы построения и конфигурации. Некоторые из них представлены на рис. 4.14. Число управляющих перемещений рукоятки должно быть равным числу степеней подвижности рабочего манипулятора, но с произвольной кинематической схемой, удобной для реализации рукоятки и работы человека-оператора с ней. Конструктивно необходимо обеспечить малость управляющих перемещений с точным съемом соответствующего электрического сигнала, пропорционального перемещению.
Упомянутые ранее управляющие рукоятки без механических перемещений снабжаются тензорезисторными измерителями силы нажатия руки человека (рис. 4.15). При этом число сигналов, снимаемое с таких измерителей, поставленных в различных направлениях на рукоятке, тоже должно соответствовать числу степеней подвижности рабочего манипулятора. Здесь, так же как и при механической схеме рукоятки, может реализоваться любой из трех основных алгоритмов дистанционного управления.
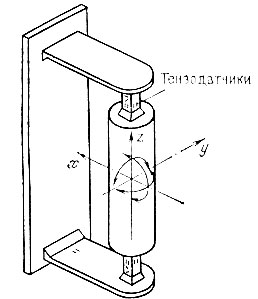
Рис. 4.15. Управляющая рукоятка без механических перемещений
Во всех случаях человек-оператор следит визуально за эффектом своих действий по фактическому результирующему движению рабочего манипулятора (на телевизионном экране или непосредственно через стекло) и корректирует это движение дистанционно с помощью той же управляющей рукоятки.
Заметим, что при силовом алгоритме управления человек-оператор ощущает на рукоятке реальные усилия взаимодействия рабочего манипулятора с объектом своей работы (в определенном масштабе). Эта дополнительная информация вместе с визуальной значительно увеличивает эффективность проведения работ. Как и в копирующих системах двустороннего действия, это именуется эффектом присутствия.
Перейдем к рассмотрению дистанционного управления роботами. Внутренние системы управления роботом аналогичны рассмотренным в предыдущих главах (программные и адаптивные). Дополнительно теперь к ним присоединяется дистанционная система управления. В комплексе они образуют единую многоканальную систему. Как уже говорилось, существуют два рода таких систем: супервизорные и диалоговые (интерактивные).
Супервизорное управление заключается в следующем. На пульте управления человека-оператора имеются дисплейное (телевизионное) и другие устройства и приборы отображения обстановки в рабочем пространстве робота (рис. 4.16). Здесь действует канал информационной дистанционной связи робота с человеком. Оператор, наблюдая таким образом обстановку и действия робота, принимает решения о подаче тех или иных управляющих команд в зависимости от сложившейся обстановки. ЭВМ робота, получив команду, исполняет ее по соответствующей программе. Набор различных программ заранее придается роботу. Каждая программа набора соответствует автоматическому выполнению роботом определенной операции. Поэтому человеку-оператору отводится функция распознавания обстановки и выдачи ЭВМ робота задания на определенную операцию, которая роботом затем самостоятельно исполняется. В этом состоит смысл супервизорного дистанционного управления действиями робота со стороны человека-оператора.
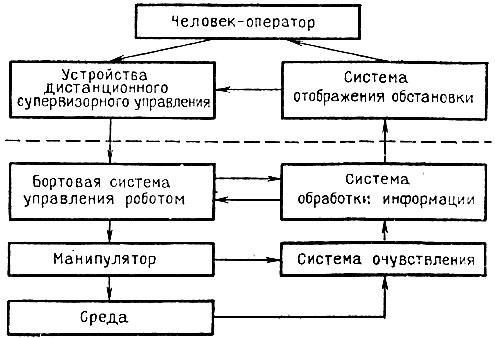
Рис. 4.16. Схема дистанционного супервизорного управления роботом
Выдача человеком команд роботу по дистанционному управляющему каналу может осуществляться различными способами. Например, может подаваться кодовый признак программы на выполнение определенной операции, затем - замена его на кодовый признак другой программы и т. д. В зависимости от возможностей робота отдельные программы могут соответствовать достаточно простым частям операции, которую должен выполнить робот, или же всей сложной операции в целом.
В других случаях супервизорная команда может выражаться в виде целеуказания. Например, световым карандашом на экране телевизора (дисплея) можно указать точку, в которую должен переместиться схват манипулятора робота и взять там заданный предмет, что автоматически роботом и осуществляется.
Оба канала дистанционной связи (информационный и управляющий), как правило, должны быть снабжены микро-ЭВМ или микропроцессорными устройствами для обработки информации с целью ее наилучшего отображения на пульте оператора и для формирования программ и целеуказательных сигналов управления по командам человека-оператора.
Как и для дистанционного управления манипуляторами, рассматривавшегося выше, здесь тоже возникает необходимость решения определенных инженерно-психологических задач. Цель их решения состоит в том, чтобы добиться наибольшей эффективности действий данной человеко-машинной системы в целом. При этом способы отображения информации об обстановке и способы формирования программ и целеуказательных сигналов играют первостепенную роль. Надо не только обучать человека пользованию техникой, но и создавать технику, максимально приспособленную к психологическим и физиологическим свойствам человека. В последнее время появился даже термин "инженерно-психологическое проектирование эргатических роботов", т. е. роботов с дистанционной системой управления. Это предполагает проведение системного анализа (теоретического и экспериментального) замкнутой системы человек-пульт управления - робот - пульт отображения - человек. На базе системного инженерно-психологического анализа разрабатываются методы расчетов, моделирования и тренажа, технического оснащения с необходимыми характеристиками для дистанционно управляемых роботов.
Диалоговая (интерактивная) система управления представляет собой следующую ступень совершенства дистанционного управления роботами. Мы видели, что при супервизорном управлении роль принятия решения о действиях робота в той или иной обстановке целиком принадлежит человеку, а робот только выполняет его предписания. В системе же диалогового управления робот, обладая свойствами адаптации к обстановке или даже элементами искусственного интеллекта, может выдавать рекомендации человеку-оператору по возможным способам действия и их числовым характеристикам, исходя из заложенного в память робота задания и на основании результатов оценивания им обстановки в зоне его действия (рис. 4.17). Робот может опротестовывать неосторожные и приводящие к опасным результатам действия человека-оператора. Робот может запрашивать человека о помощи, если ему недостает данных для выполнения требуемой операции.
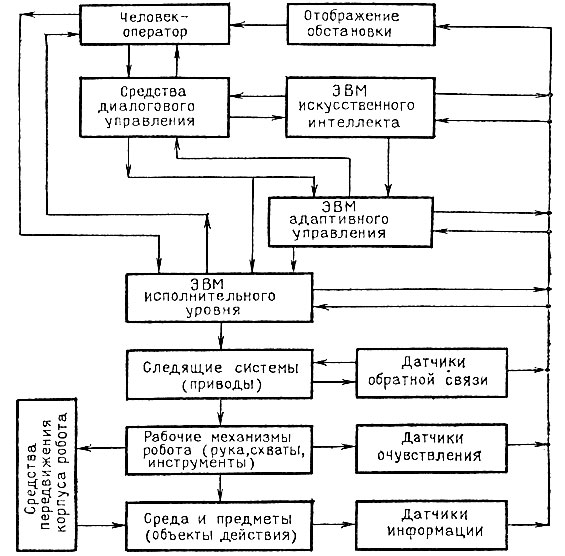
Рис. 4.17. Схема диалогового (интерактивного) дистанционного управления роботом
В диалоговой системе дистанционного управления роботом возрастает роль информационной и вычислительной техники, а также гибкого системного программного обеспечения. В такой системе задания роботу со стороны человека-оператора осуществляются в более общей форме, чем при супервизорам управлении, где робот не имеет "думающих" функций. Общение робота с человеком здесь может происходить на языке, близком к естественному. Оно может быть доведено даже непосредственно до естественного языка человека, вплоть до разговорного.
Возможны различные принципы построения диалоговых дистанционных систем управления и их практические реализации. Робот может иметь комплексы средств очувствления (сенсорных систем) разного уровня для восприятия внешней среды. Такие средства были описаны в § 2.3 и 2.4. Но здесь могут использоваться и другие средства, определяющие физические свойства среды. Уровень обработки информации в ЭВМ робота тоже может быть различным, что определяется выполняемой задачей. Другими словами, может осуществляться различный уровень интеллекта робота в соответствии с требованиями описанной выше диалоговой работы человека-оператора с ЭВМ робота по дистанционным каналам.
На рис. 4.17 показаны два варианта диалоговой работы оператора и робота с элементами искусственного интеллекта или адаптивным управлением. Показана также возможность прямой посылки сигналов на нижний уровень управления роботом.
Итак, в экстремальных условиях роботы имеют дистанционную связь с человеком-оператором, во-первых, для отображения на его пульте обстановки и действий робота в рабочем пространстве и, во-вторых, для автоматического выполнения всех операций роботом по заданиям оператора, даваемым средствами супервизорного или диалогового управления.
Однако не всегда возможно все операции автоматизировать. В тех случаях, когда невозможно или нецелесообразно программировать и автоматически выполнять все элементы операций, которые предстоит проделать в экстремальных условиях роботу, применяются комбинированные системы с автоматическим и ручным дистанционным управлением (копирующим или полуавтоматическим). В этом случае программируется все, что возможно реализовать в программном обеспечении для автоматических действий. Для выполнения же остальных элементов операций, особенно в изменяющихся или непредвиденных (в частности, аварийных) ситуациях, дополнительно подключается либо копирующая, либо полуавтоматическая система дистанционного управления (рис. 4.18).
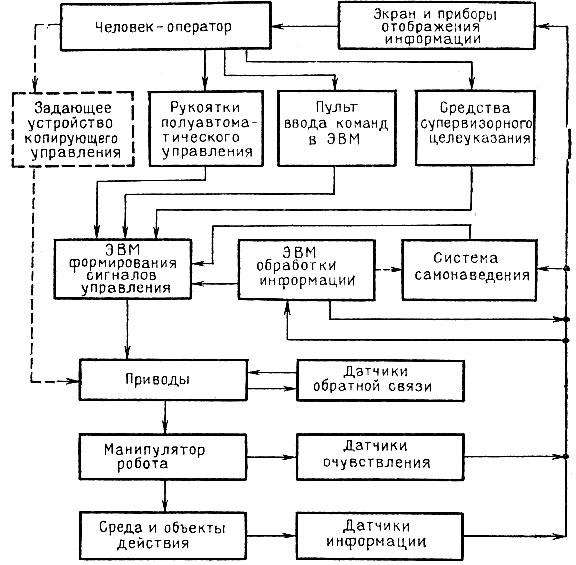
Рис. 4.18. Комбинированная система дистанционного управления роботом
Подключение этого дополнительного дистанционного управления производится человеком-оператором в нужные моменты времени, определяемые им на основе дистанционного наблюдения за обстановкой в рабочем пространстве и за действиями робота в нем. При этом оператор отключает автоматическую систему и берет в свои руки управление (в копирующем или полуавтоматическом вариантах) лишь на некоторое время, после чего снова включает автоматические режимы действий робота.
Использование такой комбинированной системы по сравнению с чисто автоматической (супервизорной или диалоговой) повышает надежность выполнения работ в экстремальных условиях. С другой стороны, введение автоматических режимов облегчает работу человека-оператора и существенно увеличивает эффективность выполнения комплекса операций в целом по сравнению с использованием только полуавтоматических систем, а тем более - только копирующих систем, когда человек-оператор должен непрерывно вручную перемещать задающее устройство, воспроизводя необходимые элементы движений рабочего манипулятора.
Следовательно, одна из основных социальных задач робототехники решается именно путем применения дистанционно управляемых роботов, освобождающих человека-оператора от выполнения напряженных механических двигательных функций и от работ в экстремальных условиях.
Дистанционно управляемые роботы с супервизорной системой управления получают применение для подводных технических работ, когда основные элементы операций для робота поддаются программированию. А из комплекса программ для отдельных операций человек-оператор, переключая их, может составлять различные комбинации, соответствующие поставленной задаче, в зависимости от наблюдаемой им дистанционно подводной обстановки. То же относится и ко всем другим экстремальным условиям, охарактеризованным в §4.1.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'